1, yes and no, I made tests inside and out side.
2,
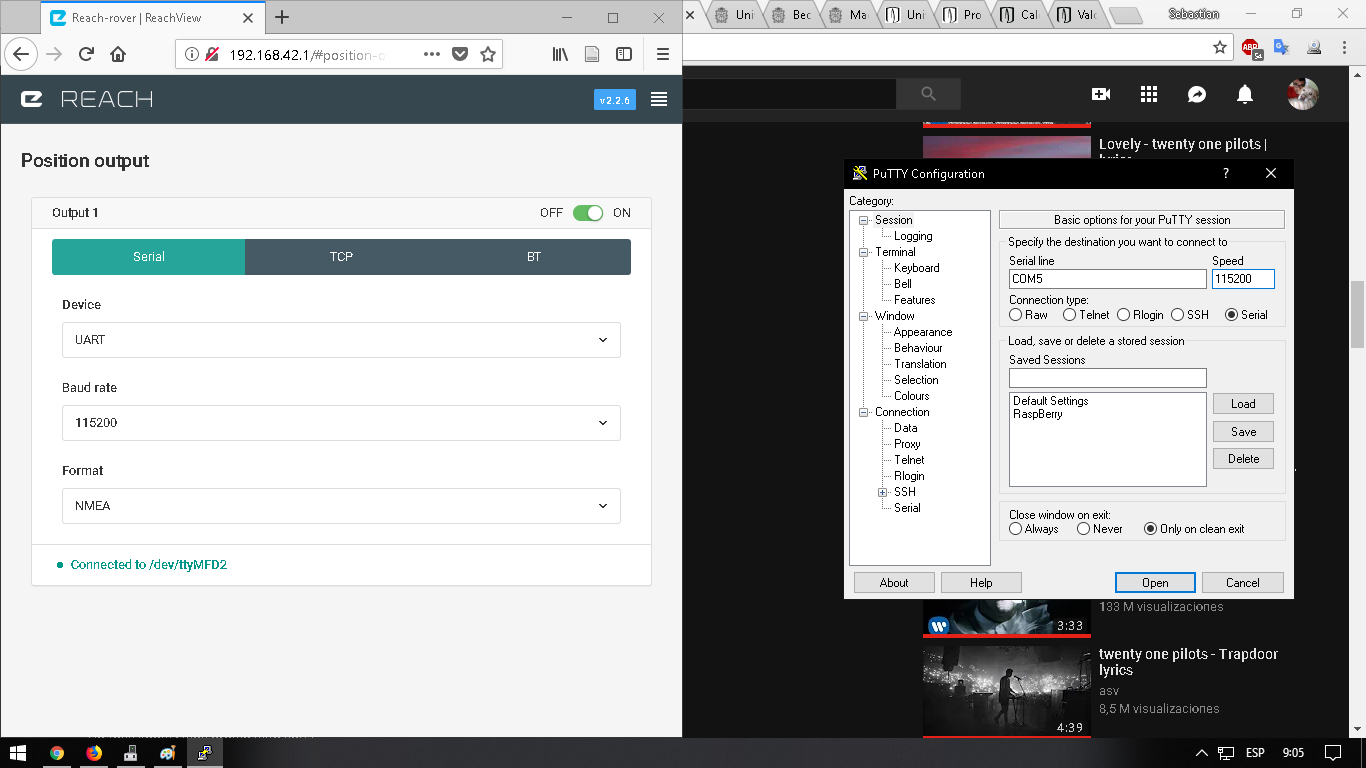
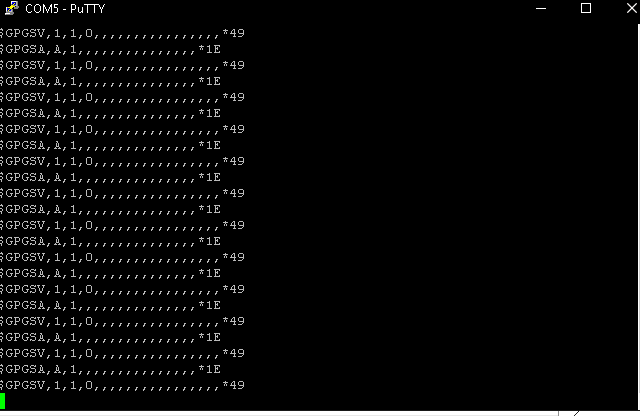
3, In my laptop
In Raspberry Pi there’s nothing, I cannot see any information.
Actually, I tried the solution that you recommend here:
and it worked in my laptop with OS windows, but it hasn’t worked in the raspberry pi yet .