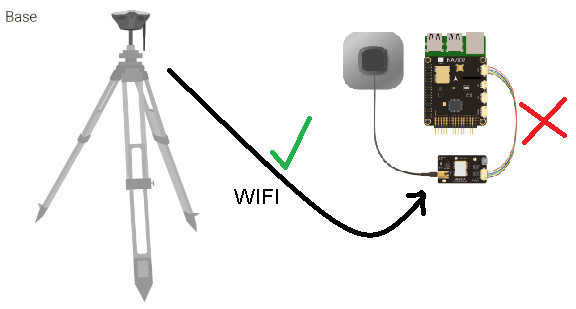
Hi, I’m working with a Reach RS and I want to use like an external GPS from raspberry pi without use ardupilot. The point is I need to read online, the current position of the system using UART protocol.
I configured the Rover module and the communication with the base (and it works), but when I try to configure the position output using UART, I cannot read any information from the RS module.
I’m working in an trajectory control for an autonomous system but I need a more trustworthy position system, because a traditional GPS has too much error.
Did you make tests inside the building?
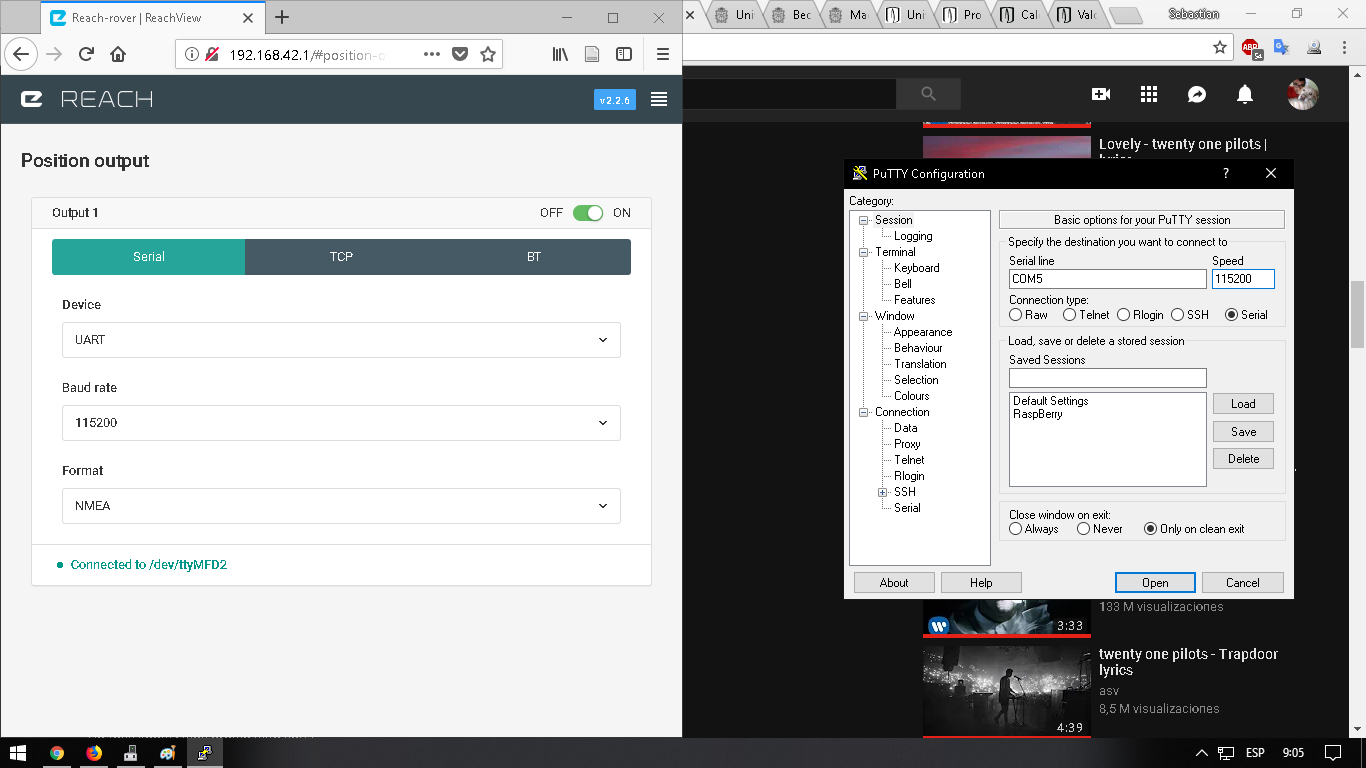
Can you show your settings in position output tab?
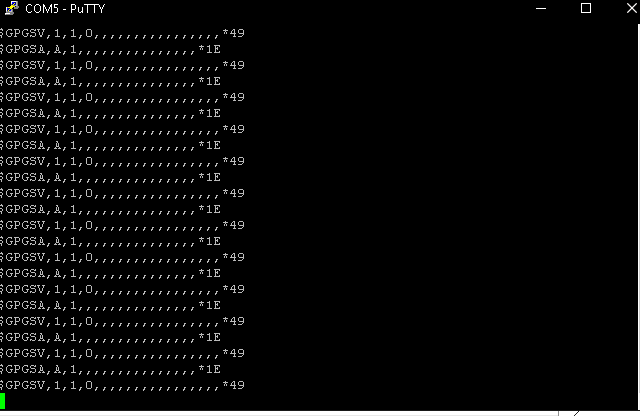
Also, can you share a screenshot with your UART output data if you have something in the stream?
You don’t need to install anything on RPi board with Navio2.
To get your position you need to connect Reach to Navio2 and set Position output as in your screenshot.
After that ssh on RPi and make screen /dev/ttyAMA0/ 115200 to test if you getting corrections.