My Setup:
Firmware and ReachView: reflashed with firmware reach image v2.3, upgraded ReachView to v2.7.3
Autopilot: Pixracer v1
Ardupilot and Mission Planner: Copter v3.5.2, Mission Planner v1.3.49
My Goal:
I would like to use Reach RTK as the GPS system on my quadcopter, with the goal of getting centimeter level accuracy relative to the location of the base station (the accuracy in absolute coordinates is unimportant).
I am using Arducopter/Mission Planner to plan my missions and I’m a little confused as to how to ensure that the coordinates used in setting the waypoints of my mission and the GPS readings used by my autopilot are in fact the relative coordinates with respect to the approximate bases station position, rather than absolute coordinates which will have a lower degree of accuracy without waiting a very long time to fix the coordinates of the base station.
What I would ideally like to do:
- Set up the base station Reach module and fix its coordinates quickly with an arbitrary level of accuracy (i.e. does not need to be anywhere near cm level accuracy for its absolute position–just a general sense of where it is), rather than waiting for several hours to get an accurate absolute fix.
- Create a mission plan where the waypoint locations will be read as locations relative to the position of the base station.
- Use the rover Reach module connected to my autopilot as my GPS system, which will attain cm accuracy in reaching the desired waypoints (again, relative to the base station position – not in absolute coordinates).
What is the best way to integrate Reach with Ardupilot in this manner? Is it indeed possible to obtain cm level relative accuracy without very long wait times for fixing the base station’s absolute coordinates?
Let me know if I should provide additional clarifying information.
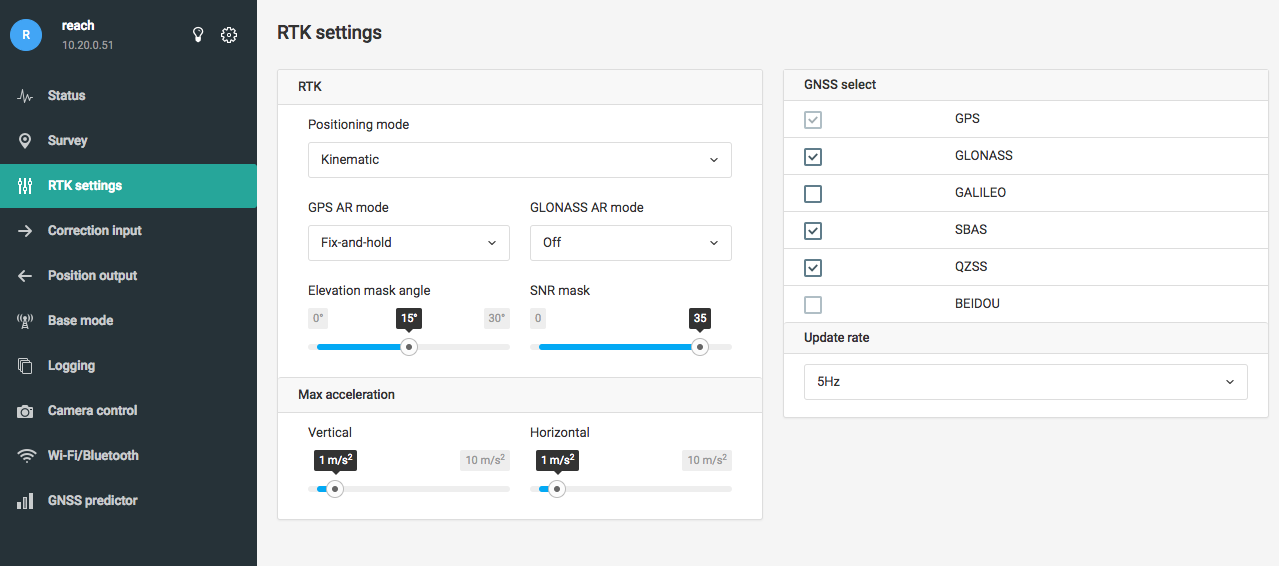
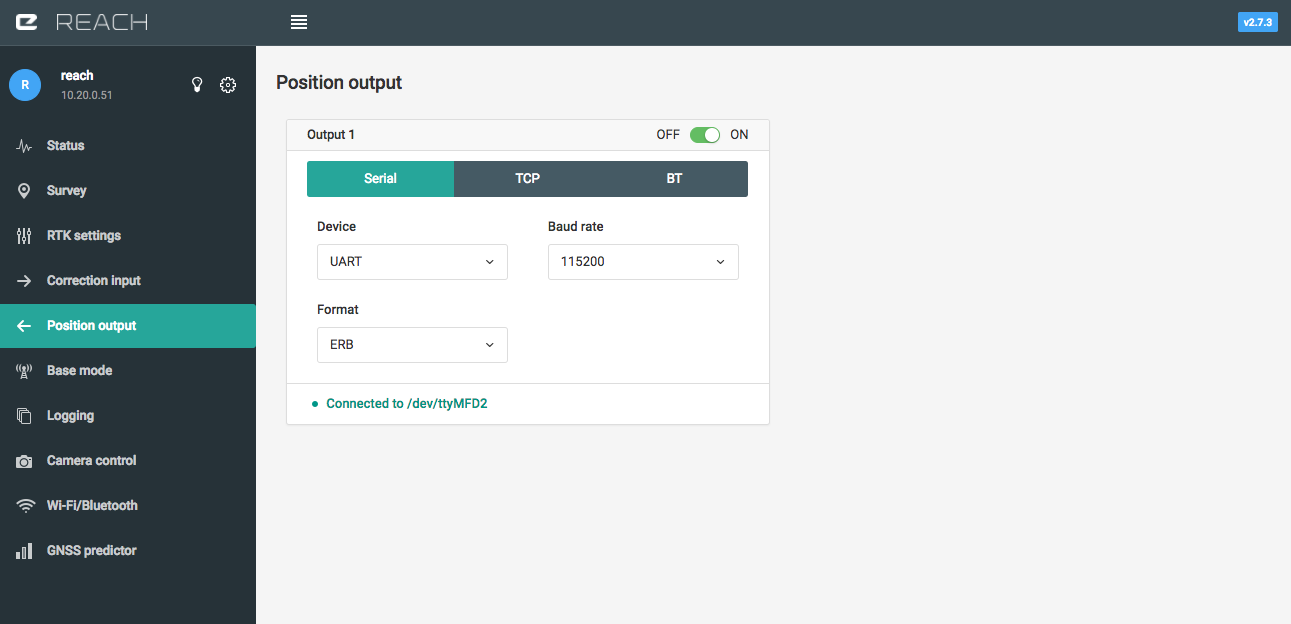
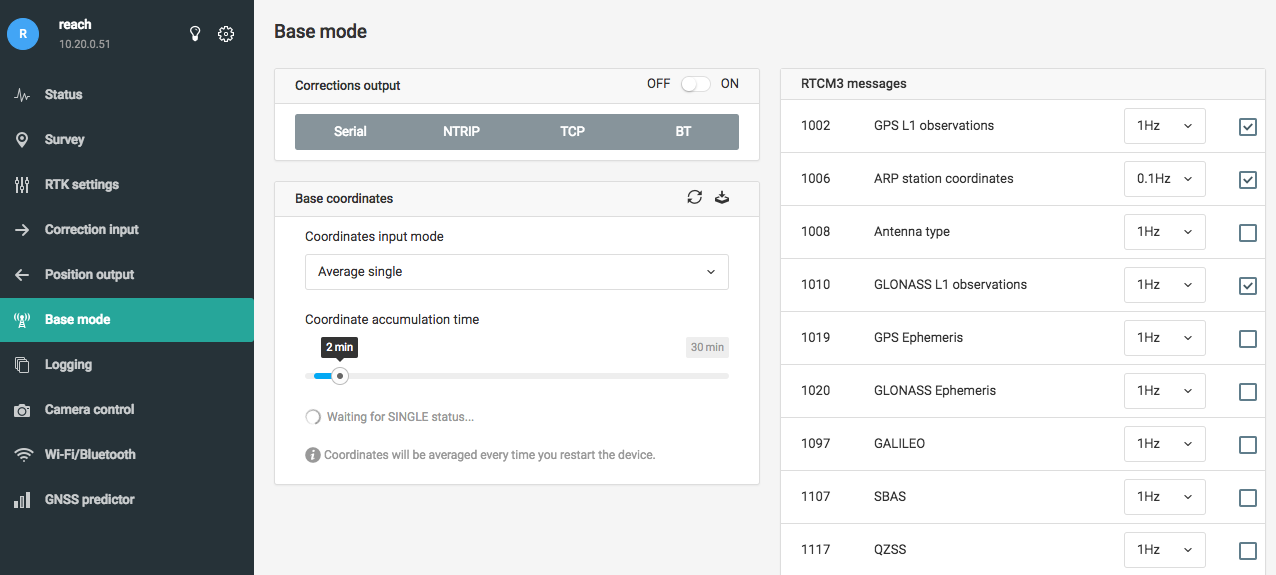
(Screenshots of ReachView setup on Base and Rover module are attached below)
Thank you
Base:
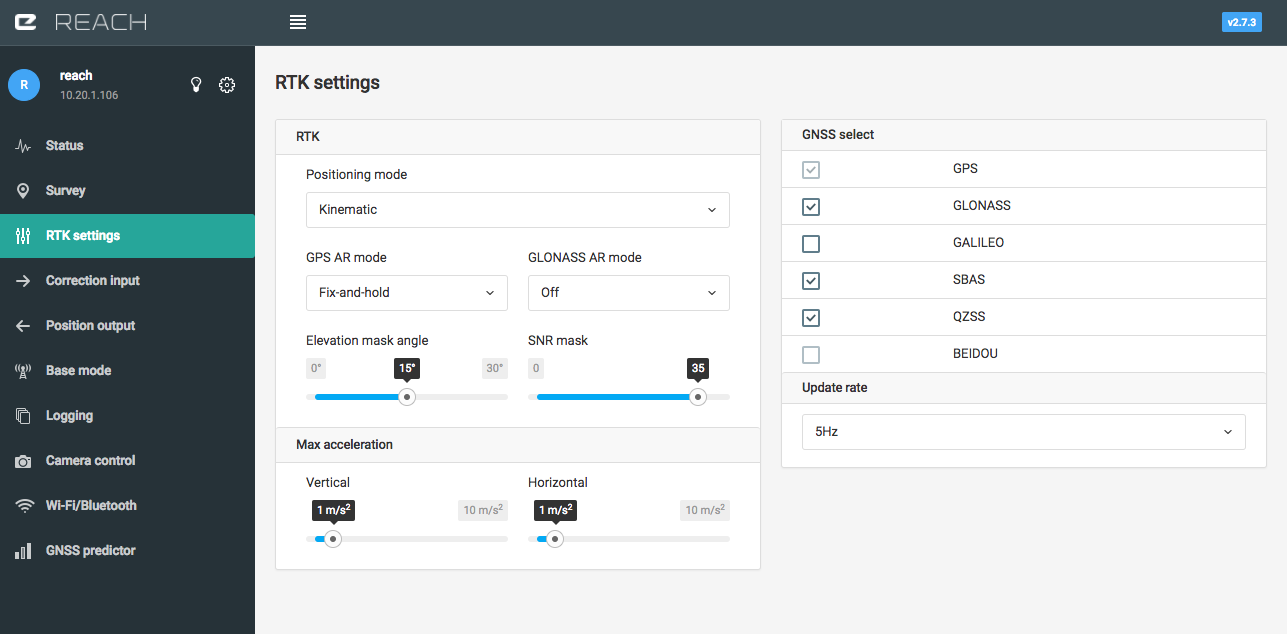
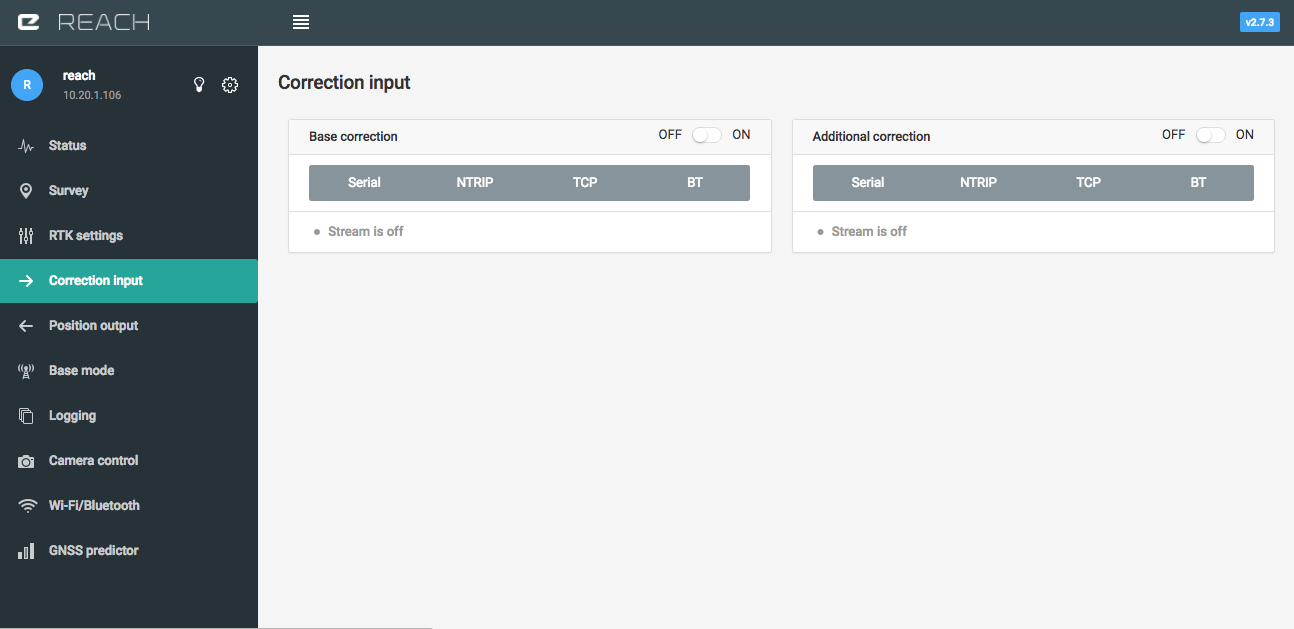
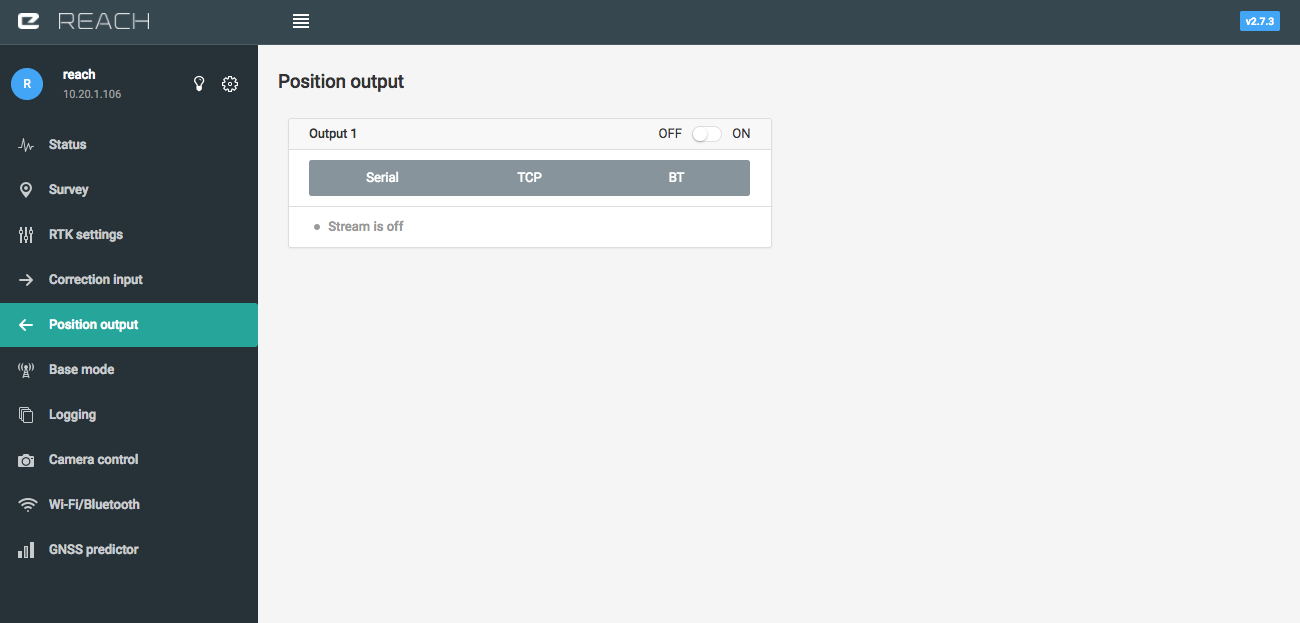
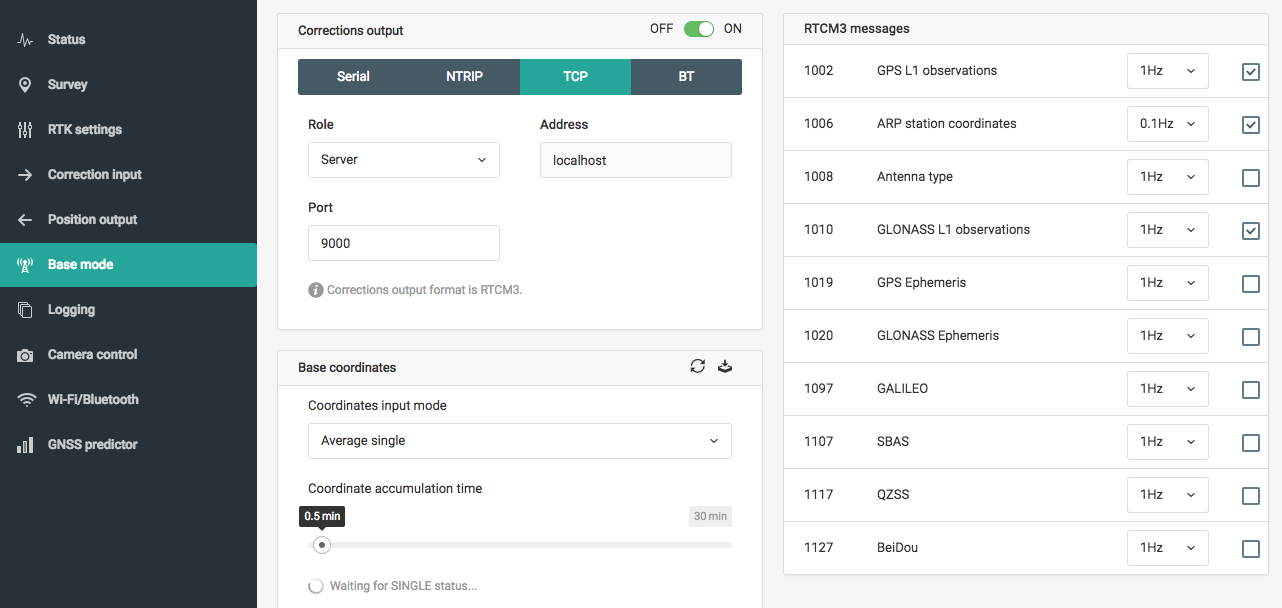
Rover