Recently, I conducted a survey using an Emlid RS3 and a M300 RTK with the L1 payload. The project was to survey a river nearly 25Km and the deliverables were an orthophoto and 2 point clouds, one delivered by Lidar and one by photogrammetry. I created 25 flight routes (close to 1Km each) because I had difficulties to keep the drone in line of sight and the link with the controller active. The routes were in made in such a way that I get both LIDAR data and photos with acceptable overlap in one flight. For each one of the 25 routes, the workflow was the same and as follows.
Create a point using the RS3 with known coordinates using NTRIP RTK (from CORS).
Place the RS3 in that point and set it as base for the M300.
Also (not necessary but I did it anyway) I started logging data.
Collect the data with M300 & L1
Pack everything and move to the next site.
When I started to process the data, I saw that in 2/25 known points that I created had significant differences in coordinates between the RTK and the Static (10-15 cm in elevation), these points had a baseline from the CORS > 17km. So, I chose to keep the coordinates delivered from the static solution (I believe to be safer). Now, for the Lidar, in DJI Terra this is easy because you apply base swift. The photos on the other hand, had a wrong geotagging and I had to do PPK.
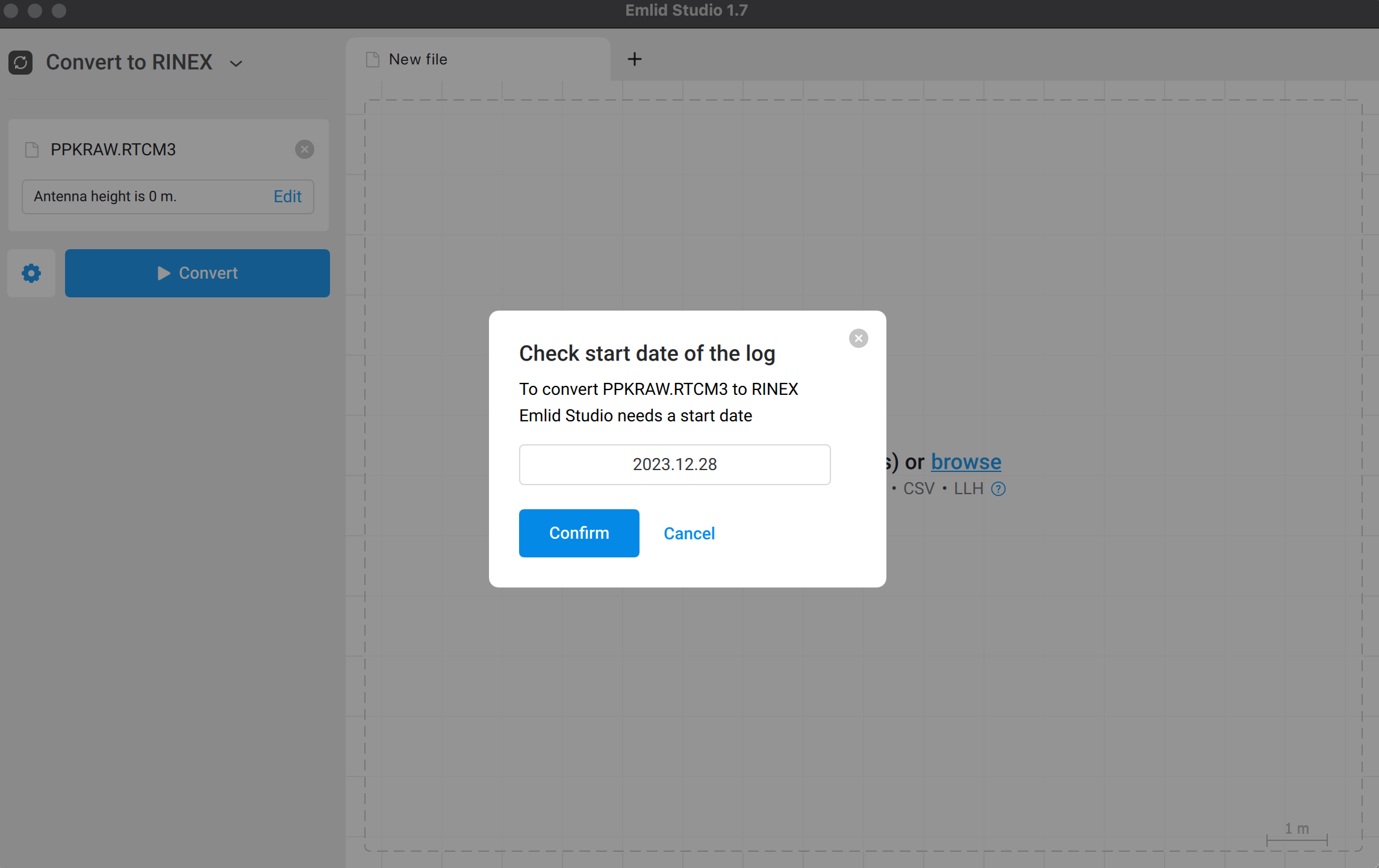
In the folder from the L1 there was no obs file but a PPKRAW.bin and a EVENTLOG.bin. I read in a DJI forum that the PPKRAW.bin is an RTCM3 file, so I renamed it to PPKRAW.RTCM3. In Emlid studio all worked perfectly.
Are RTCM3 files same as RINEX?
The question is for both PPKRAW.bin and the Base corrections logged in RS3.
Is my workflow valid?
I want to know because in case there is no reception to use NTRIP, I can do the same workflow with static and still have the drone with RTK (relative accuracy) to use the follow terrain feature which is a must in the areas that I usually work.
Sorry for the long post.
I may not have understood your question correctly, but I will try to help you.
When you fly in NTRIP mode, with real-time corrections, theoretically you would not need to make any corrections, however, there may be a loss of signal, or some other problem, which causes your images to shift.
Well, if you realize this, and decide to make a PPK, you can use the .MRK file in Emlid Studio, to georeference your images, and then Geotagging.
The M300 receives the corrections for RTK from the RS3 through Local NTRIP. So the absolute accuracy of the photos is as good as the absolute accuracy of the known point. The M300 will have a fix solution even if the known point has absolute accuracy of 7m (good relative and bad absolute accuracy). The question is, in the case of bad absolute accuracy, log data to be able to do a static solution and at the same time collect the data (M300 is fix) and perform PPK using the RTCM files (PPKRAW.bin)
Your workflow is correct. You can use the RS3 as the base to send corrections to the drone.
There could be a lot of reasons why the images are shifted, and unstable internet connection is one of them. If the internet connection is unstable, it can cause the corrections to be delayed or lost, leading to degraded accuracy.
I read in a DJI forum that the PPKRAW.bin is an RTCM3 file, so I renamed it to PPKRAW.RTCM3.
You are correct. The PPKRAW.bin from the DJI drone is an RTCM3.2 MSM5 format that stores satellite observation data and ephemeris data. To convert this file to RINEX in Emlid Studio, rename the file extension to .RTCM3 and use the Convert to Rinex tool. Just ensure that you supply the correct start date before converting.
Converting this file will give you the RINEX observation and navigation file. Then, you have the RINEX observation and navigation file from Reach RS3 when you enable raw data logging. All these files together with the MRK file from the drone should be used to geotag the drone images using Emlid Studio.
You can also use the RTCM3 file from the base, but we usually use the RINEX files because the former is a binary file, while the latter is an industry standard for GNSS data. So, it’s more helpful to use the RINEX file as you can visualize it, or check the data using a code editor.