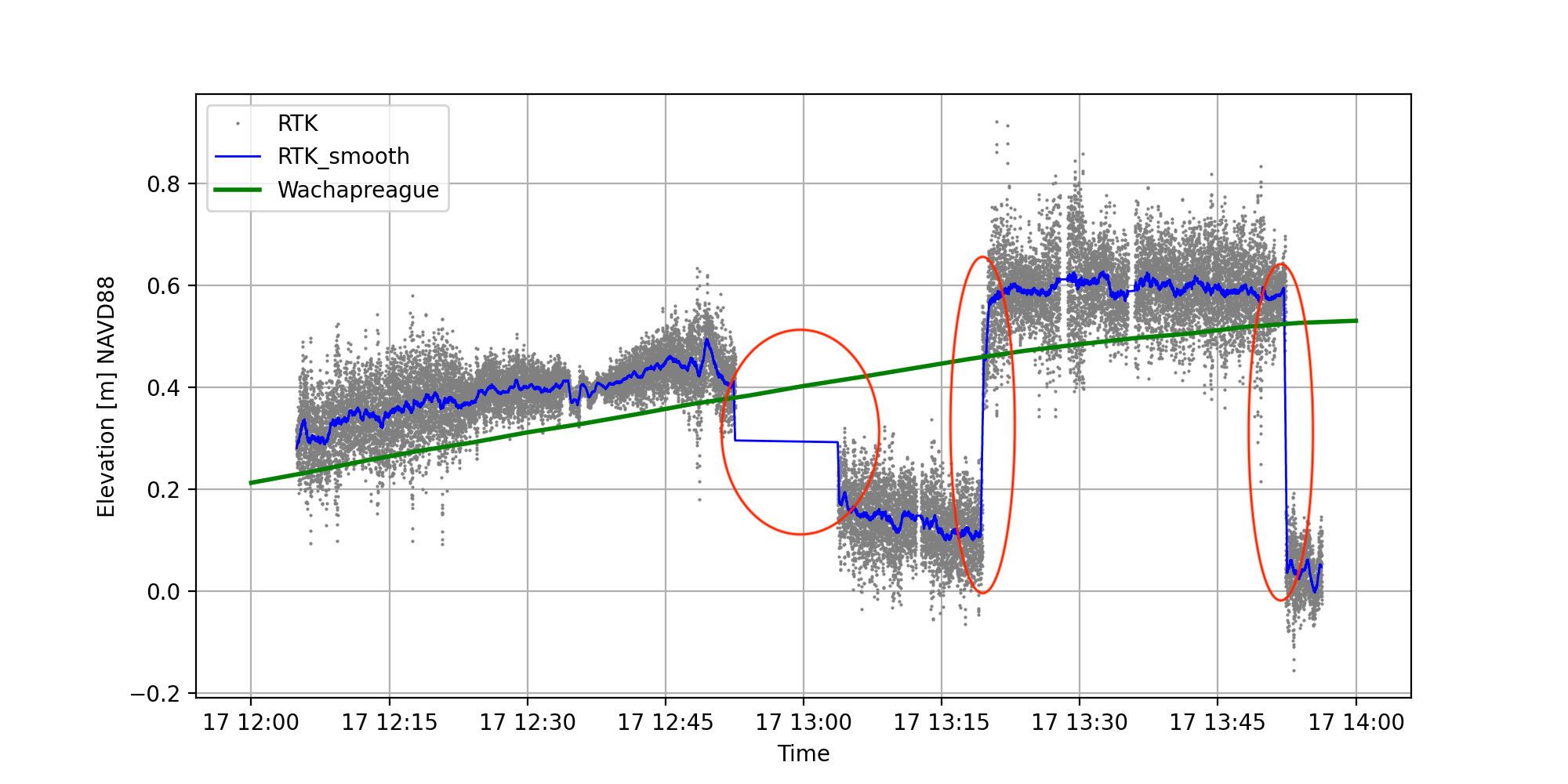
I’m experiencing some erratic jumps in my elevation values. My base station is an Emlid Reach RS2 while my rover is a NovAtel Vexxis GNSS-802L antenna, receiving corrections via NTRIP. I’m conducting bathymetric surveys, and, as part of that, I collect an approximation of sea level. The plot below shows sea level measured over a few hours from a reliable local tidal station (in green) and my measured approximation of sea level (smoothed data in blue and raw data in grey). For many reasons, I do not expect my sea levels to perfectly match the tidal station, but the first half of the data looks about right. Then, things get weird. I’ve circled in red three instances where the elevation seemingly jumps around. Sea level changes gradually over a tidal cycle, so I know something is wrong with this data, despite that all of this data had an RTK fix with at least 6 satellites.
Has anyone experienced these issues before or have any ideas as to what might be happening?
The metal awning near the rover definitely isn’t ideal, but it wasn’t an issue with previous surveys. The main difference with previous surveys is that the base has switched from a Trimble R8 to a Reach RS2 and the baseline was <10 km for the previous surveys.
I use GPS for grade control. In order to maintain less than a 1/4" tolerance, my baseline cannot be over 2 miles.
Also, you will see variance in elevation throughout the day, as much as two inches. Trimble ran into this when guys were land leveling for rice fields. In order to correct for it they came out with what is called Vertical Point RTK. It basically uses two stationary rovers feeding a Base. The stationary rovers altitude should be constant if they vary, they inform the base which makes a correction for it.
There was a company in Australia that did something similar with one rover and a base. The base GPS was mounted on top of an electronic linear actuator that the rover moved up or down if it’s height changed, hence correcting the base height.
You are using a 3rd-party rover, so it can be tricky to determine the reason for these jumps. Nevertheless, we can check if everything works as intended from the base side.
Please share raw data logs from both units recorded simultaneously for 10-15 minutes. Also, I’ll need to check the Simple System report from Reach. You can download it from Settings -> General.
Hi Tyler
This is large jumps. Did your rover log record the quality of point (fixed, float), number of satellites, age of corrections, etc… like Reach logs ? It could give a hint to what happened.