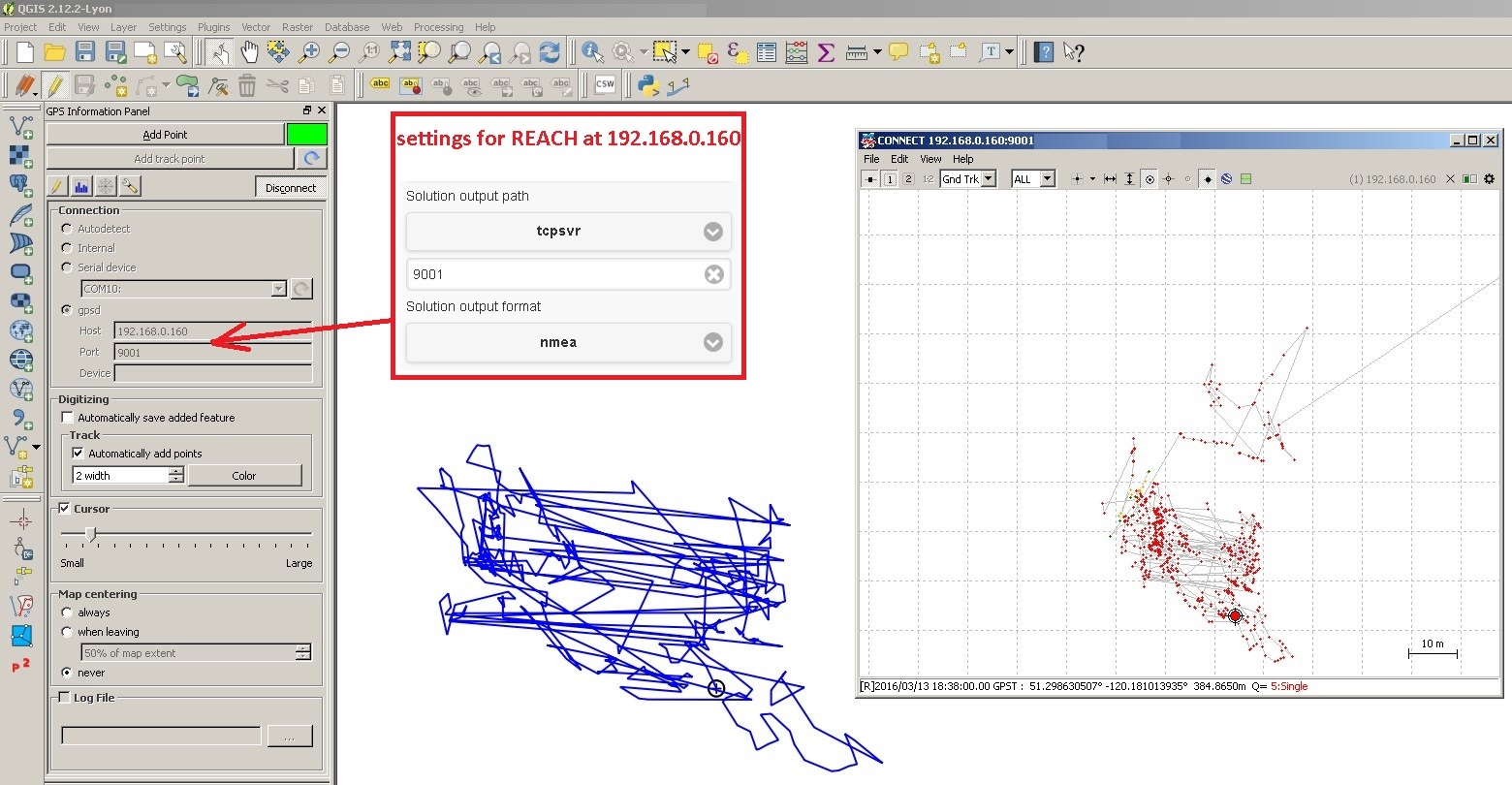
Received my reach rtk kits a week or so ago and I am loving the accuracy I get in it so far. A bit about my setup, I route the rtk solution to port 9000 and then use strsvr on my tablet to route it to virtual COM ports for use in QGIS. I have a few quick questions:
RTKNAVI reports positional accuracy on the computer version, can that be implemented to ReachView anytime soon?
I understand also that loss of sat fix results in cycle slips which can be resolved by filtering positions based on imu data. Is the imu already interated, ie. where we just need to set “rec dynamics” to ON in reachview?
I am using Reach RS. Wondering whether the IMU integration with the RTKLIB has happened yet? Without the RTK integration, it seems the positioning quality drifts a lot and cannot compete with those RTKs with IMU integration.