I’ve been able to get my Reach RS3 to feed corrections to my Topcon 3DMC dozer, 3DMC excavator, and a Hiper VR rover using a Satel external uhf radio. For some reason I can’t get our Hiper V rovers to initialize.
You have some options for using a Reach RS3 as a base and a Topcon Hiper V as a rover:
You can use a pair of 3rd-party radios to connect both your receivers.
You can work with our Emlid NTRIP Caster. It’s available for free and works worldwide. This guide will help you set up both your receivers.
To use RTCM3 corrections, it should work fine with Reach RS3 by following this setup.
Change the update rate to 1 Hz in the GNSS settings
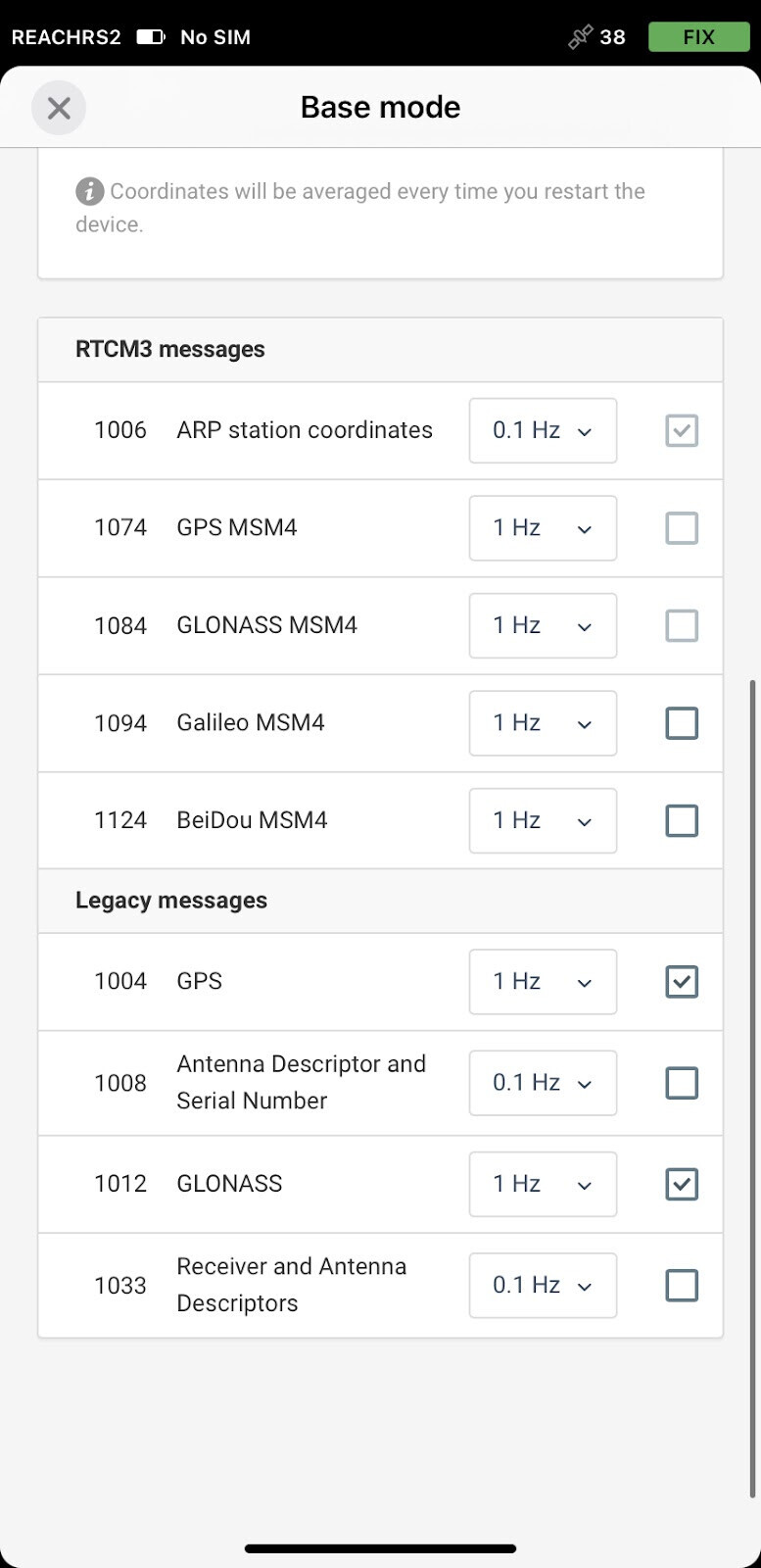
Enable only 1006 (0.1 Hz), 1008 (0.1 Hz), 1004 (1 Hz), and 1012 (1 Hz) RTCM3 messages in the Base mode. To show the full RTCM3 list, click on the Legacy messages button
Here’s the list of the messages it outputs as a base:
It holds the fix fine, it just seems to take a few minutes to initially initialize. It may just be a Hiper V thing. They have always taken a lot longer to initialize to our state’s local CORS network as well.
Everything is working and we’re working the site using the Emlid as the base. If your going to just use it as a base, you may want to consider the RS2+ as there is no need for the tilt feature at that point. We turned it off in our RS3.
Hello Victor, the RTCM settings did work. However when I went to change the GNSS update rate setting I only had the choice of 5 Hz or 10 Hz. 1 Hz was not available in the dropdown menu.
Hi @roth, that’s great you were able to connect it. Indeed the GNSS update rate, now is only allowing 5HZ or 10Hz, in our suggestion is using the default option of 5Hz.
hey @roth i just got a m2 and it works with my topcon sr using ntrip. i bought a lora radio for it but idk if it will work with topcon radios. i have a 3dmc excavator to with a uhf radio. maybe i need a rs3 for the radios to work?
Regarding the UHF radios with the RS3 is compatible with the TRIMTALK protocol, you can establish RTK communication between the Reach RS3 and a third-party base. For this connection, the Reach RS3 will need a 410-470 MHz UHF antenna.
The Reach RS3 supports correction input and output exclusively in RTCM3 messages. Therefore, it is essential to configure the third-party base or rover’s message type as RTCM3.
Hey Roth I now have a rs3 and I want to get an external radio so it can be a base for my hiper vr over uhf. I will do more research on external Satel Compact Proof UHF radio.