Yesterday I was out doing a drone survey at a remote site using two RS3’s and a Mavic 3 Enterprise.
The RS3’s were configured as Base & Rover, and I was using LoRa for local corrections between them. That meant that every time I switched between configuring GCP’s and taking readings, and running Drone flights, I needed to also manually switch between LoRa and local NTRIP for broadcasting corrections. There were a couple of occasions where I forgot to do that, and had a lengthy walk back to the Base to switch the outputs around.
Is there any way to enable two correction outputs - that way I could leave both LoRa and Local NTRIP enabled and connect to each as needed.
If there isn’t currently a way to do that, could you guys consider it as a feature request?
I’m aware I could send corrections to EmlidCaster and connect both that way… but in this case I have no cell signal so it wouldn’t be an option anyway. A local portable WiFi AP wouldn’t cover the distance either so just running with local NTRIP over IP wouldn’t work.
At the moment, we don’t have an option to use two correction outputs at the same time. But sure, I see how it can come in handy. I will note it as a feature request. If there are any updates, I’ll share them with you here.
Expanding this thinking a little, implementing an additional Reach general “supplementary” output could also be useful in other ways.
E.g. a flexible utility steam, where off to side, you could select an input and output.
In my case with a Rover, what would help is the ability to do “correction sharing”. The workflow example is in addition to the rover internally using the incoming RTCM3 from LORA or UHF, at the same time being able to relay it out via Bluetooth or through a portable WiFi router to companion devices of volunteers working closely alongside in small sites in remote areas.
Do you mean outputting RTCM3 corrections that your rover received from the base via Bluetooth or Wi-Fi? Could you tell me more about the setup where you would use it?
Yes, RTCM3 received & used by Rover, and at the same time shared / on-forwarded / relayed out via the Rovers WiFi or Bluetooth.
This would be particularly useful for a mixed collection of vendor devices and/or when working outside/at the limits of correction sources in small work areas.
In my own situation the use case is heritage studies of ghost towns and historic gold mine sites in remote & rugged areas. Some volunteers bring their own devices, and we typically work close by in a small area
For the mapping & survey component, post processing is obviously possible but the benefits of RTK are even more desirable when different vendor equipment and different proprietary software is otherwise required. E.g. multiple instances of post processing complicated by different vendor nuances. For relocating positions e.g. specific heritage artifacts, then RTK is essential.
Some example situations:
Two Emlid rover devices RS3 & RS2/+. Both are working close by together on a remote house site. The RS3 is receiving the only available source of corrections on UHF, so share corrections with RS2/+
Two Emlid Reach devices, however one Reach is now being used as a local Base. The Emlid Reach Rover can receive LORA, but the second Rover is now a Trimble and does not have LORA. If the Reach Base could output both LORA and local WiFi, the Trimble Rover could now become productive, and independently of the Emlid Reach Rover, so a more flexible option.
Some locations in the bush are under trees too heavy for the Reach. But our Trimble Rover has a (very expensive) antenna with multipath mitigation that often works…but it does not have UHF or LORA. So, a nearby Reach, even if it wasn’t in the clear for satellites, could still forward out corrections to the Trimble and save the day.
We have two Emlid Reach Rovers again, its now better because both are RS3 and we have UHF corrections. However, one Rover has to drop into a basement pit or mine hole, it still has open sky above but now loses the UHF (or LORA). The other Rover could follow alongside at the top edge and relay down the corrections allowing the lower rover to continue mapping the bottom.
Such forwarding options would give us a lot of flexibility and potentially open up even more opportunities…including maybe also for Emlid, with Reach becoming the central utility tool of choice possibly opening additional migration paths from other vendor environments.
That’s a really interesting set of scenarios, and which I could see myself making use of the RS3’s in a similar way.
Like you, I’m surveying a large number of abandoned mining sites in remote areas & without cell connection at many of them. While I’m the only one using GNSS equipment at the minute, it would be really useful to extend the potential for others to make use of the local base for RTK by relaying it out through a local wifi network AP, and which in turn could potentially be relayed further by more AP’s (obviously within reason due to the ageing of the signal.), that would make the RS3 a really flexible & useful tool in archeological sites (and other job sites too!).
Your idea of it acting as a relay to pump a correction stream into hard to reach areas like basements and wheel pits with limited sky view is interesting.
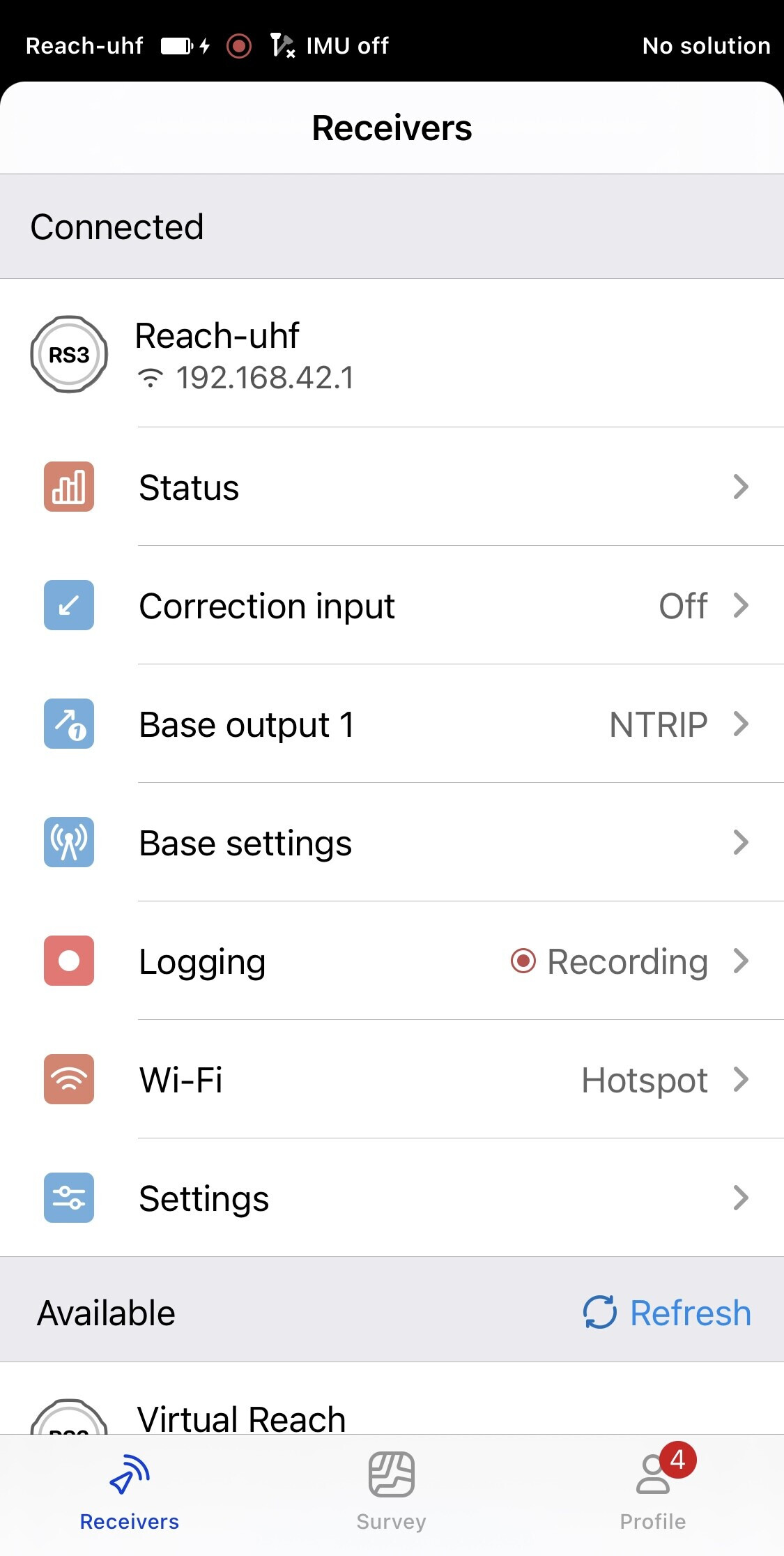
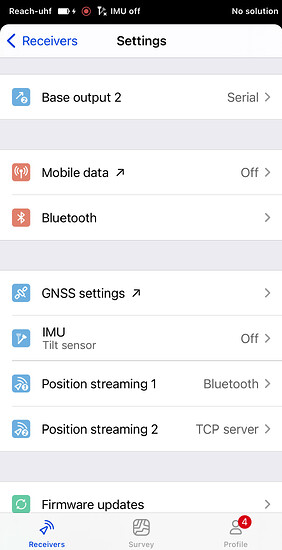
Starting from version 33 Beta, you can now publish corrections simultaneously in two types of outputs. I’ve attached a screenshot for an example Base Output 1 as NTRIP and Base Output 2 with Serial: