I purchased a RS3 to serve as a base for my Trimble R12i and drone.
I usually used VRS Now for my R12i and drone (Mavic 3 Enterprise with RTK).
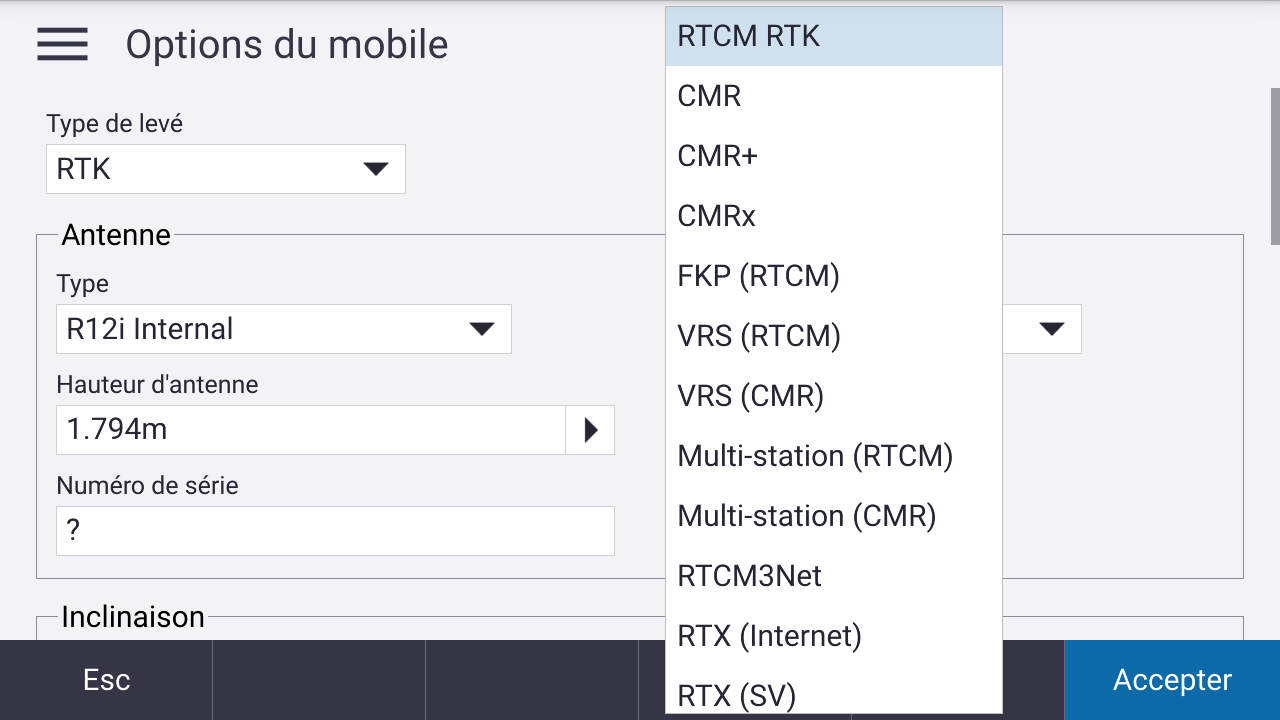
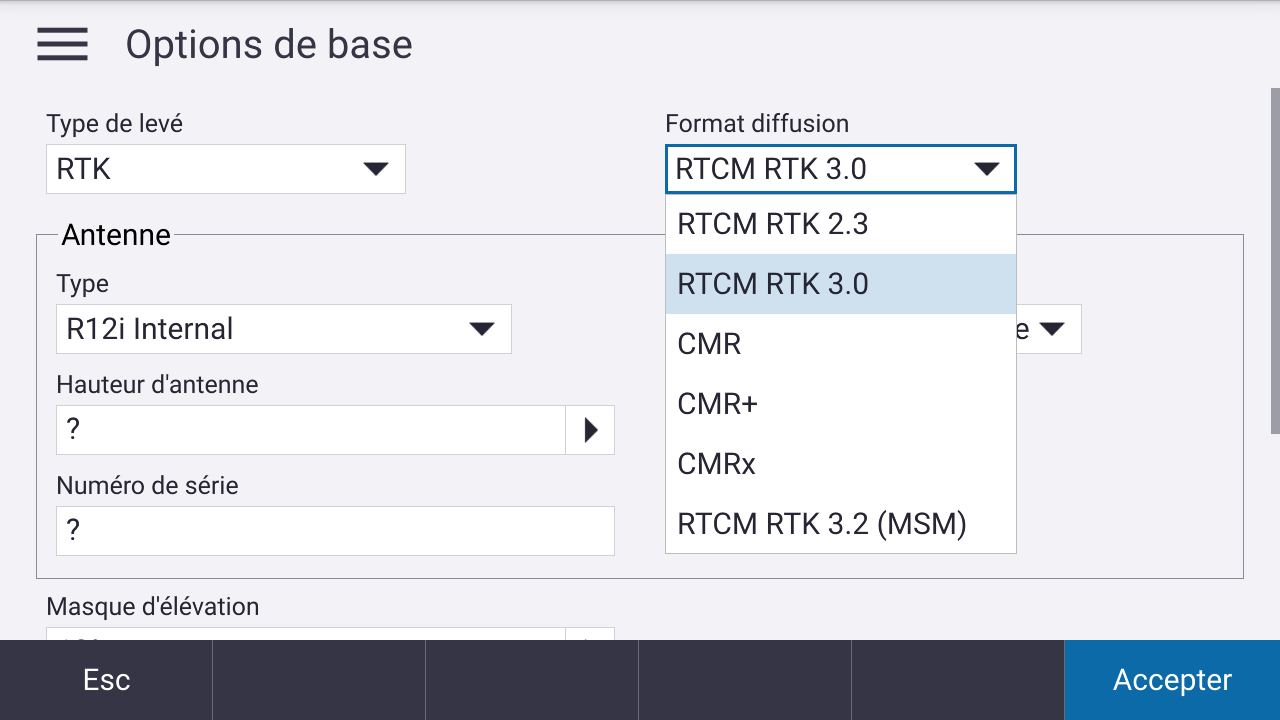
I did a test with the RS3 as a base and R12i as a rover. I used Emlid Caster. The RS3 has a SIM Card to send the corrections and I connected in Trimble Access my R12i to the caster in 2 different ways :
• RS3 base position with Average Fix position from VRS Now input : Measured with the R12 connected to Emlid Caster my benchmark surveyed before with VRS on the R12 : my point is 6cm off in horizontal but 25cm vertically
• RS3 base position manual on a point I surveyed with R12 VRS : I measure a second point I surveyed with R12 VRS : this time it is 6,36m off horizontally and 2,31m vertically.
How is this possible ?
The distance between the base and rover was only about a couple meters.
Has anyone set up a Trimble GNSS with a RS3 and would tell my if my settings are correct ?
Is everything you shoot relative to network VRS? Or do you have some sort of site calibration? Also, to understand the stated error you did mean centimeters on the first and meters on the second?
I’ve run Emlid, Trimble and Topcon rovers off an RS2+ and not had any issues. Personally I would set 3-4 points encompassing your area, import those points into Emlid Flow, do a site calibration and then occupy one of those points. I suppose you could try to shoot in two points without a localization but that could be sketchy.
No. I did 2 different base setup : One with Average Fix with the RS3 receiving corrections from the VRS Now network and the other one by inputing manually coordinates from the point that I previously shot with the R12i and VRS Now.
The points that I wanted to control to check the setup were measured with VRS Now and R12i because that worked fine for me the last 2 years so it is my benchmark for this new survey style.
I used a published coordinate system (CC48 - EPSG 3948), no local calibration.
Yes, it was a centimeters the first time and meters the second time.
Thanks for sharing all these details about your setup.
If I understand correctly, you have access to the VRS Now to receive corrections with the receivers and also some points with known coordinates. So, first, I’d suggest to do a test with the units:
Collect the benchmarks with both receivers using VRS Now.
Compare them with the known coordinates.
Please let me know how they match, and then we can continue with further steps to find the root of the original issue.