Hi!
I am experimenting with a base+rover combination and wondering what happens if there are many bases? Will they disturb each other, will the rover’s (one or many) positioning accuracy be somehow affected?
Br,
Antti
Hi!
I am experimenting with a base+rover combination and wondering what happens if there are many bases? Will they disturb each other, will the rover’s (one or many) positioning accuracy be somehow affected?
Br,
Antti
That can cause big problems. In particular if they have not been surveyed in. Each base would have it’s own LLH and would reflect in your rover data according to which base you are receiving.
I know with Trimble units, it also causes interference in the radio signal or noise as it is receiving from multiple. This is why they normally use repeaters instead of multiple bases.
I expect you are connected to one Base at every point in time and they all have a unique frequency. If the Base’s have all being setup on properly surveyed points and they are setup just right over those survey marks or control point, each rover point measured regardless of Base in use should come in close [accurate] to each other.
Yeah repeaters do help extend the baseline a radio can cover rather than having a new Base at the point where one Base begins to drop in strength of radio signal.
For RTK the short and long answer is no, it cannot work.
However, for PPK there are multiple options:
What would you get from using multiple bases ? Well, in short, a more trustworthy and rigid result. In a bit more detail, with X bases, you get X baselines for each point you observe. So instead of 1 set of StDevs per point, you get X StDevs per point.
Instead of 1 position, you get X positions per point.
This can help increase confidence, as you have better means to identify outliers, downright errors and so on.
Imagine the process of trilateration, the more circles you add, the smaller area of error becomes, or, if you have big errors, you get a more complete picture of your errors.
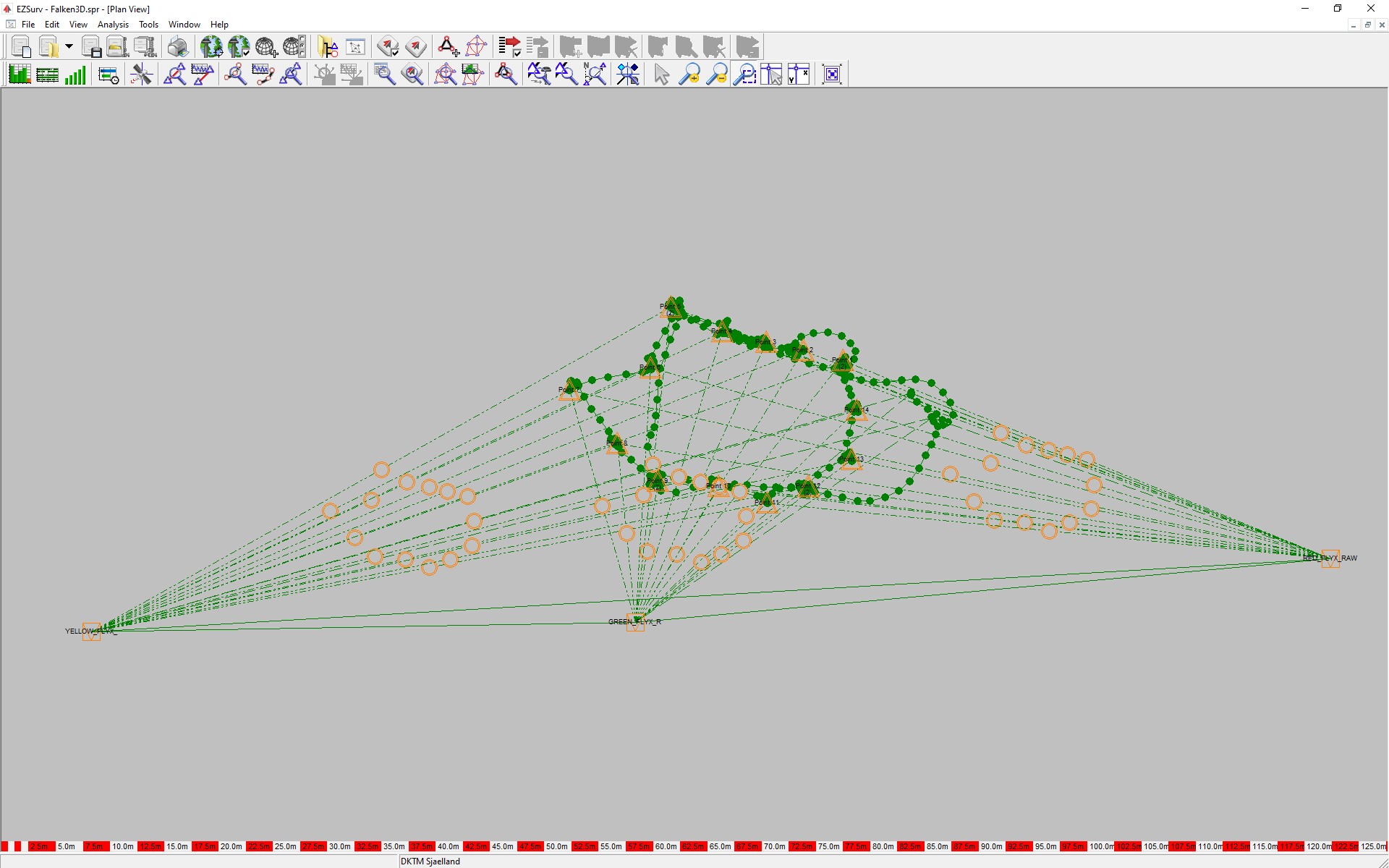
As an example Here is a screenshot from EzSurv with 3 RS2 bases and 1 RS2 rover from a recent 3D-modelling GCP layout. All bases were processed from the same CORS. This actually showed 3 different relative positions (still within the HW specification of the RS2), which was then taken into account when determining the final GCP-positions.
This topic was automatically closed 100 days after the last reply. New replies are no longer allowed.