



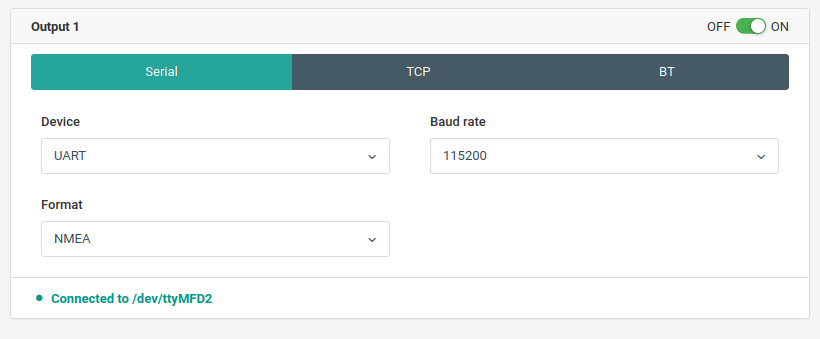
I’m trying to use the RS232 connector on the Reach RS2 for charging, remote power on/off, and data. The first two were easy, but I’m having issues with RS232 data. It’s configured send NMEA data over Serial at 115200 baud:
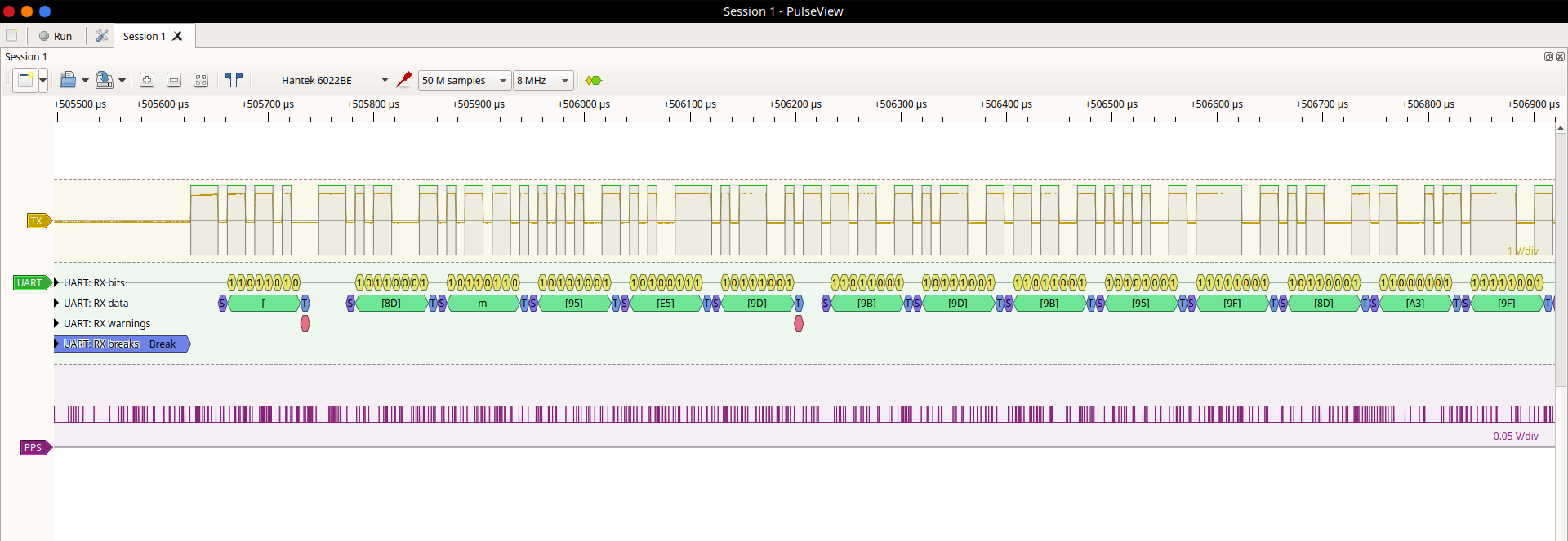
I tried to connect it to a DB9 connector (I have the cable without a second connector) into a computer’s RS232 port, but wasn’t getting anything. So, I decided to hook it up to my oscilloscope/logic analyzer. I’m seeing that the TX (pin 7, brown) has a peak of around 6.1V, but is… not even close to ASCII:
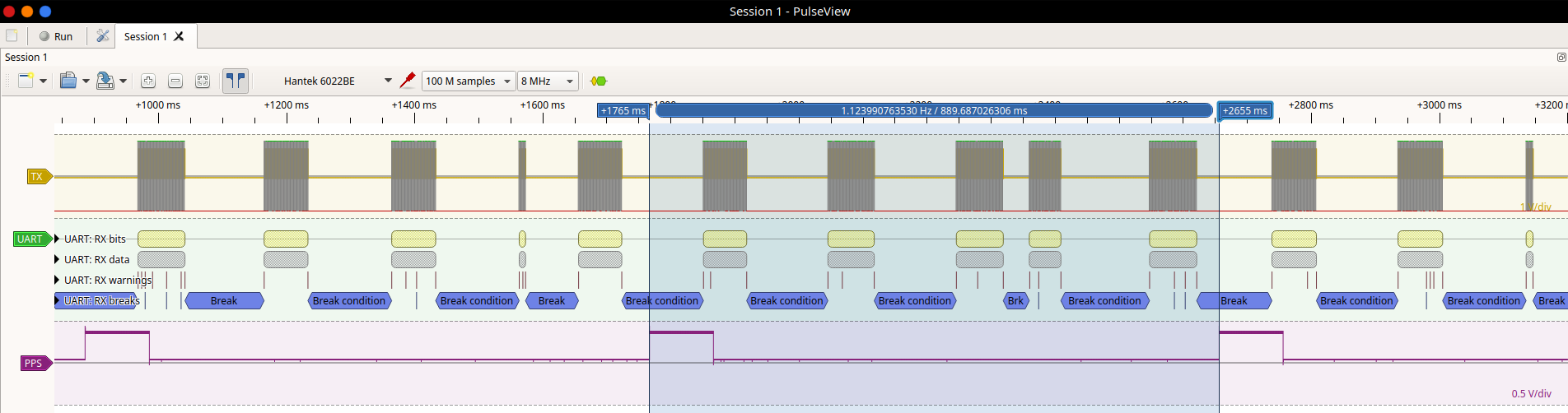
The PPS line (pin 5, yellow) has a voltage of about 3.6V every pulse, but seems to occur slightly sooner than that, roughly every 890ms:
My oscilloscope might have an error of ±0.06% at maximum, but definitely not that big of an error.
I tried wiring it as shown in the female RS232 connector wiring, but that didn’t work, and doesn’t match up with my computer’s pinout (page 46). So I then instead connected TX to pin 4 of a female DB9 connector to match with pin 2 of a male DB9 connector, but that didn’t work either. I’m thinking the problem is one of these, but I’m not sure:
- The computer truly wants a full -13V to 13V signal, while I’m only seeing 0V to 6V from the Reach
- Linux isn’t receiving any data from the serial port for an unrelated issue (I don’t really have easy access to another RS232 device)
- Running
sudo stty 115200 -F /dev/ttyS5and thensudo cat /dev/ttyS5is not the proper way to test receiving serial data in Linux (and I tested every serial port fromttyS0tottyS5)
Firmware image and ReachView version: ReachView v2.22.4
Simple system report
app version: 2.22.4-r0
'wifi_status, interface: wlan0':
- wifi_mode: infrastructure
- ip: 10.0.1.215
is_added: true
is_connected: true
is_visible: false
mac_address: 6C:21:A2:8F:7F:10
security: wpa-psk
ssid: Budapest
uuid: 0e1c8c26-7b3e-46b0-a9cd-79dc93da5070
base mode:
base coordinates:
accumulation: '2'
antenna offset:
east: '0'
north: '0'
up: '0'
coordinates:
- 0
- 0
- 0
format: llh
mode: single-and-hold
output:
enabled: true
format: rtcm3
path: tcpsvr://:9000#rtcm3
type: tcpsvr
rtcm3 messages:
'1006':
enabled: true
frequency: '0.1'
'1074':
enabled: true
frequency: '1'
'1084':
enabled: true
frequency: '1'
'1094':
enabled: false
frequency: '1'
'1124':
enabled: false
frequency: '1'
bluetooth:
discoverable: false
enabled: false
pin: '***'
constraints:
lora:
frequency:
- - 902000
- 928000
correction input:
input2:
enabled: true
format: rtcm3
path: CaseWestern1:[***@156.63.133.115](mailto:***@156.63.133.115):2101/ODOT_VRS_RTCM3
send position to base: single
type: ntripcli
input3:
enabled: false
format: RTCM3
io_type: tcpsvr
path: :9028
device: null
logging:
base:
format: RTCM3
started: true
correction:
format: RTCM3
started: true
debug: false
interval: 24
overwrite: true
raw:
format: UBX
started: true
solution:
format: LLH
started: true
lora:
air rate: 2.6000000000000001
frequency: 902000
mode: read
output power: 20
position output:
output1:
enabled: true
format: nmea
path: ttyMFD2:115200:8:n:1:off
type: serial
output2:
enabled: true
format: nmea
path: :9002
type: tcpsvr
rtk settings:
elevation mask angle: '15'
glonass ar mode: 'off'
gps ar mode: fix-and-hold
max horizontal acceleration: '1'
max vertical acceleration: '1'
positioning mode: kinematic
positioning systems:
compass: true
galileo: true
glonass: true
gps: true
qzss: true
snr mask: '35'
update rate: 5
sound: null
