



Files for processing
The vertical accuracy of my RS2+ Rover is off on a lidar mission I did this past week I will test it for horizontal/vertical this coming week . I first noticed that my checkshots beside the base are off vertically but as much as 1-2 feet. The results of the Base unit are spot with the surveyor when i submit it to OPUS. But the Rover is terrible when comparing known elevation points. I plan to do a point to point comparison between the Rover and TS this week.
I have a buddy who was having the same problem but he stopped logging at 2 min per gcp and started doing only 15 seconds and he felt this improved things due to the Emlid algorithm. But I changed the time in the CSV from 2 minutes to 15 seconds for this same survey and it did not have any effect.
There is something wrong and I hope it can be figured out.
Details of this job:
Surveyor Control: TN State Plane, US-SF
1,371957.019,798978.943,264.37,OPUS/BASE 1,DOLLAR GENERAL
2,373817.6827,799468.2526,300.81,BASE 2,CEMETARY
3,371638.0464,800350.2026,258.73,BASE 3,WAVERLY FARMS & BAMSLEY CV.
4,375454.0418,800556.9131,280.63,BASE 4,RALEIGH-MILLINGTON & KIING STATION
5,374887.0183,801997.9506,271.32,BASE 5,PLEASANT RIDGE & KIING STATION
6,372095.5676,801463.1656,248.88,BASE 6,COLUMBIA WOODS CV.
RS2+ Base: Antenna Height is 1.68 meters (to bottom of antenna). Using a prism pole so height to bottom of antenna is printed height of 1.8m less 0.12 meters.

RS2_ Rover: Antenna Height is 1.88 meters. Prism pole printed height of 2m less 0.12 meters.
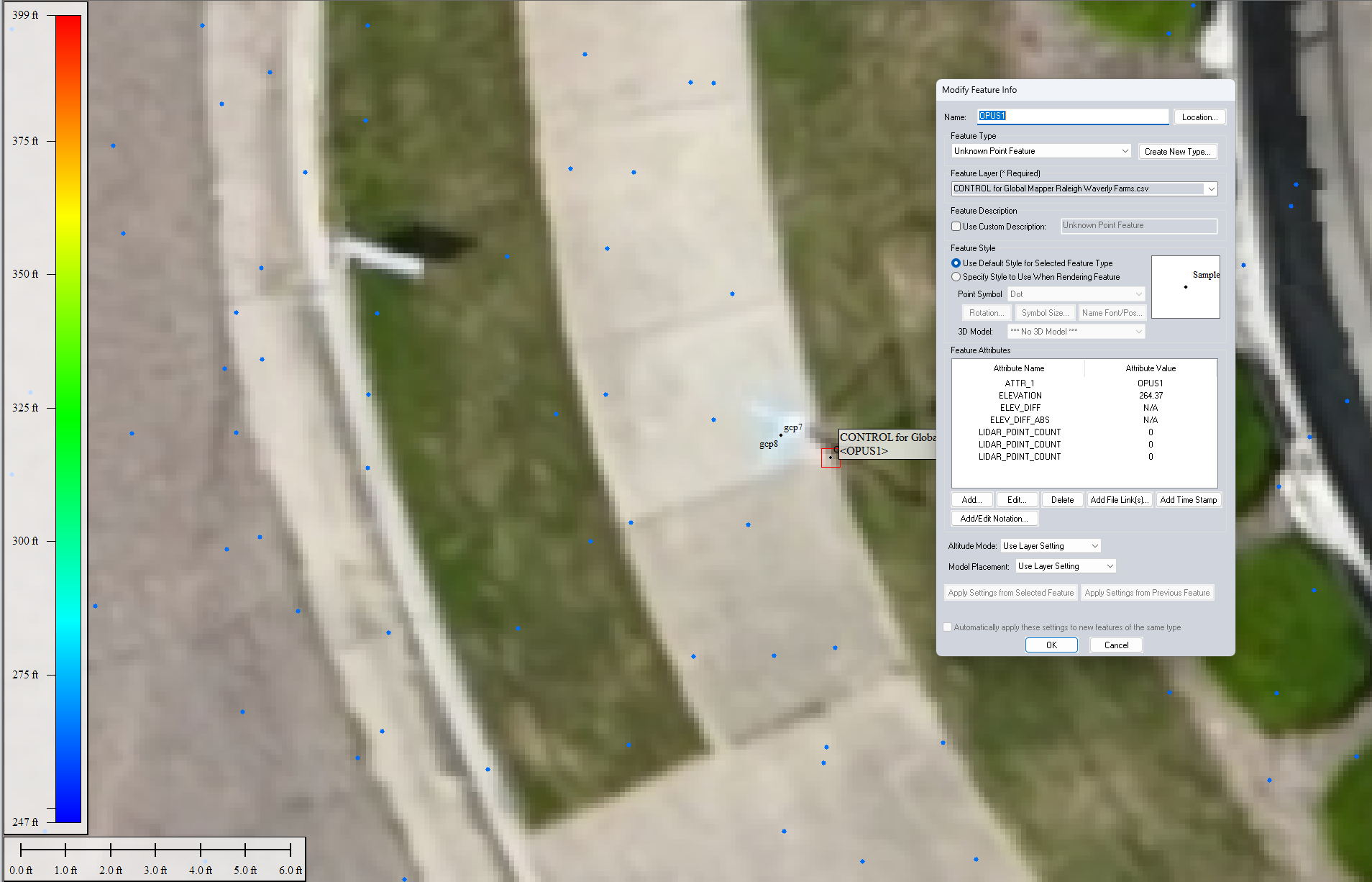
The RS2+ Base occupied Control 1 established by the Surveyor. The Orthometric height is 264.37 feet.
I also put a GCP beside the benchmark (about 1.3’). That point was observed twice as gcp7 and gcp8. The PPK Height of GCP7 is 265.466’ and GCP8 is 265.486.
That is a difference of 1.116’
The lidar point cloud is within 1/10 of a foot elevation of all Surveyor control points without any adjustments.
The surveyor BASE 4 was occupied by my GCP3.
BASE 4 Elevation: 280.63’
GCP 3 Elevation: 281.814’
Difference of 1.214 ’


=========================================================
The Surveyor BASE 6 was occupied by my GCP12
BASE 6 Elevation: 248.88’
GCP12 Elevation: 250.102
Difference of 1.222’


=========================================================
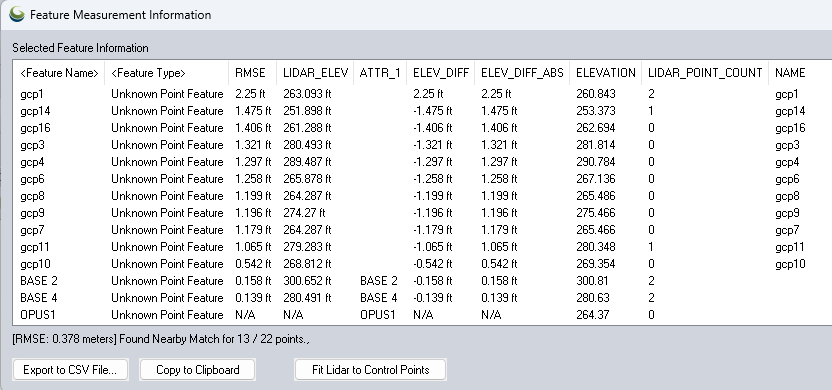
Below is the comparison of the Lidar point cloud to the Rover points. They show that there is an approximate 1.2’ error between a 2’ diameter average and the GCP.
=========================================================
Emlid Studio Process screen shots
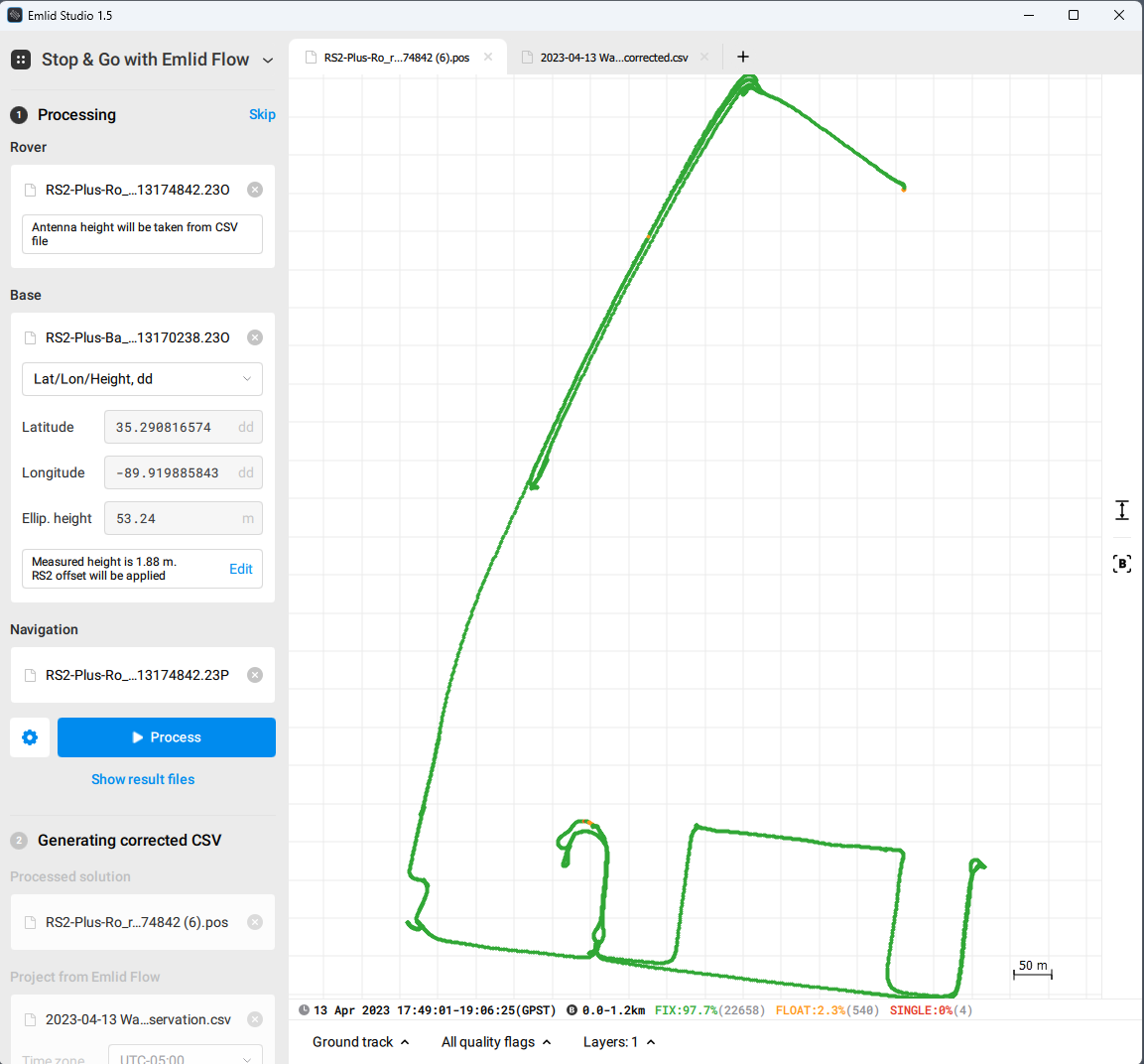
I used the Orthometric Height of 264.37 (80.58 meters) plus geoid height -27.339 meters =
Ellipsoid Height for the Base unit 53.24 meters

Base pole on left, Rover pole on right (.12 offset on both poles)

