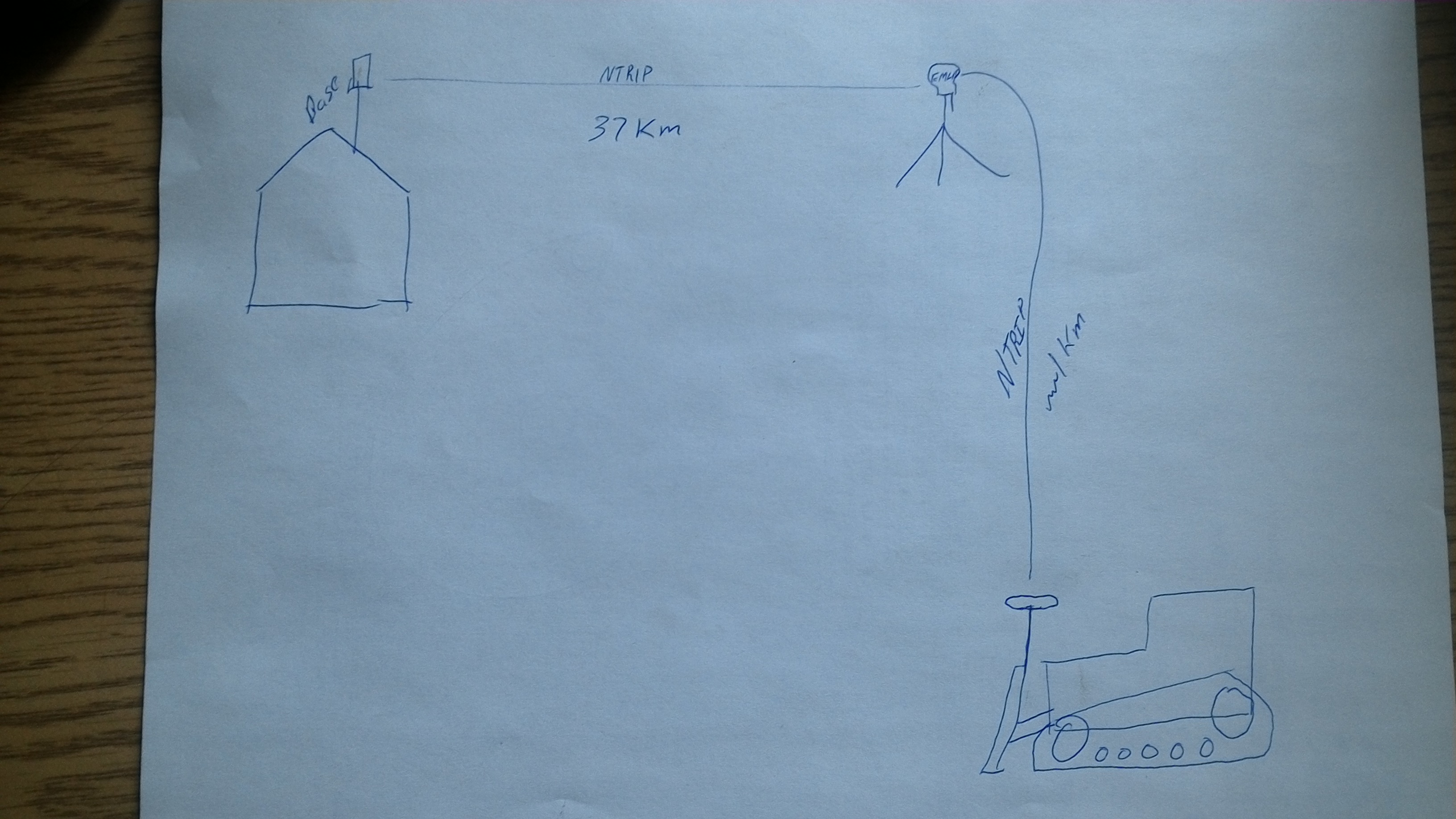
So basically, we purchased a D61PX Komatsu dozer with machine control. We are attempting to use our existing Emlid hardware to setup an Ntrip Base station, and go via SIM card to the dozer.
Currently, I have been able to get the Ntrip working fairly well for RS2 to RS2. Though if I am setting up on a point, and need a 10 second or 2-minute average, it will take about 2-5x as long. Even though it never goes out of “fix”. In the office I’ve been able to tie in about 3-7mm once I have adjusted to match a known control point. So the relative accuracy is top-notch.
Getting the Dozer’s Topcon system to connect to the Ntrip seems simple. However It was only giving an intermittent fix at best.
After some advice from @michaelL I have changed the update rate on the RS2 to 10hz. This seems to make a fairly reliable connection and fix on the dozer. HOWEVER. It only lasts for about 5 minutes.
I can move the dozer around, use the Auto’s to control the blade, and everything ties in great. But then it just flips off and shows that it is waiting to initialize. I’m not sure if it would reconnect itself on its own, but if I reset the receiver, it will connect again and continue for 5 minutes.
Any experience here from someone doing similar things? I feel like it’s not common. But if I can get this working, I think this would be a huge selling point for Emlid!
I have the same problem with M2. When i set it as ntrip base it works for some minutes (random) and then the 3rd party rover stops utilizing the corrections. Some times it gets back on and the rover regains the corrections and works.
I think is a bug that occurs only on 3rd party rovers but emlid haven’t resolve this at least in my case.
Maybe emlid base to emlid rover works without problems but emlid base to 3rd party rover is not stable.
Could you try the following settings on Reach RS2 base?
Change update rate to 1 Hz in the GNSS settings
Enable only 1006 (0.1 Hz), 1008 (0.1 Hz), 1004 (1 Hz), and 1012 (1 Hz) RTCM3 messages in the Base mode. To show the full RTCM3 list, click on the Legacy messages button
When roving there is an RTK setting in Reachview for Fix-and-Hold or Continuous but I don’t know of anything like that in the Topcon gear and I don’t know which one it defaults to. FaH takes the solution from the first fix and holds it until there is a disruption in the fixed solution or a power cycle. Continuous is always looking for the latest solution from each epoch. I wonder if the machine is “timing out” of a solution?
How are you getting the Ntrip into the cab? How far is the baseline?
Ntrip has one issue on high correction rate systems, it adds a fair amount of lag into getting your corrections, also cell connections are not perfect. I use cell for farming and its hangs once and awhile, but not a super huge deal cm precision is nice but excessive.
Guys with graders and dozers will run off a local base for this reason. They use Ntrip to find a local base coordinates, then fire the corrections to the yellow equipment in real time from the local base. Also the shortened baseline ensures you are truly seeing the same satellites.
The F9P manual says its optimum to receive corrections within 50ms of measurement, almost any cellular Internet connection will put you over this.
Also how accurate are the base coordinates? If the base is close and you do not need absolute accuracy, averaging in is not an issue.
I recently set up my own commercial base due to the local tractor dealer discontinuing RTK correction services. Trimbles manual has this gem in it.
The base station coordinates should be known to within 10 m in the WGS-84 datum for optimal system operation. Incorrect or inaccurate base station coordinates degrade the rover position solution. It is estimated that every 10 m of error in the base station coordinates introduces one part per million error in the baseline vector. This means that if the base station coordinates have a height error of 50 m, and the baseline vector is 10 km, then the additional error in the rover location is approximately 5 cm, in addition to the typical specified error. One second of latitude represents approximately 31 m on the earth surface; therefore, a latitude error of 0.3 seconds equals a 10 m error on the earth’s surface. The same part per million errors apply to inaccuracies of the base station’s latitude and longitude coordinates.
This has been proven, after I PPP’ed the base there was noticeable performance increase in tractor steering 40km away. It also out performed the dealers closer base comparing the older field lines, so I doubt they had theirs set up correctly in the first place.
We are using centimeter-accurate locations. The dozer needs to tie in within about 30mm (little over an inch).
The accuracy is not in question here, since when it does work, it ties in just fine. The furthest we are using it is 37km currently.
It’s just a matter of it not holding the fix. And that isn’t working, even when it was only 50m from the nTrip base.
There is currently no way of connecting them via LORA unless I start buying other radios. And I’m not familiar enough with external radios to know which ones to get.
As I mentioned that is not an option without external radios. the RS2 broadcasts at the 950mhz range, Topcon receives at 450mhz. If I could setup on-site, I would have started with that and moved to a more complex options like nTrip.
If you set your local base to receive its fixed base location via ntrip, then you set its base mode to transmit via ntrip to your rover again just like the other base just a lot closer.
I don’t think that is the case, since the caster.emlid.com site shows both the base and the rovers connected. Plus I was running a rover RS2 and it showed no issues.
Using @davehofer1993 diagram and a local radio as the last leg will give you solid corrections at about 10/20ms delay
Even if you have the RS2 sitting right there beside the dozer, but are using cellular, to go base to the internet ntrip server (+100ms), then from internet ntrip back through cellular (100ms) to the dozer you can expect 200/500ms delay. Ntrip is super handy but for this application it can be too slow without a blazing fast network. Old corrections take longer to fix on. Using local lora radio in my yard fixing is almost instantaneous, using cellular usually takes almost a minute for first fix with the M2.
Is the rover on the dozer GPS only, or GPS Glonass? or full GNSS?
Sending corrections it does not need, or not sending corrections it wants can reduce the effectiveness of the rover.
Baseline distance is especially important if only using one constellation or if your receiver is L1 only. Topcon states to only use dual frequency receivers on baselines over 15km. what model are you using?
At 37km you will experience some grief starting as satellites low on the horizon are not viewable by both base and rover simultaneously, so they cannot be used to fix.
If I could use a local radio, I would… I’ve mentioned several times that the emlid and topcon radios are not compatible without external hardware that I do not have.
Currently the -ONLY- option open to me for connecting them is nTrip.
The Dozer is MC-G3 GNSS, GX-55 control box and MC-R3 GNSS reciever.
The projection is 3TM 114, with NAD85 datum. One site uses a localization.
Not sure where you saw that using dual-frequency only over 15km baselines. That doesn’t make any sense. Dual frequency recievers are highly useful everywhere.
Its right out of their manual, only use dual frequency receivers on baselines over 15km. Its a reading comprehension thing, they are showing the limitation of L1 receivers, it was a direct copy paste. So single frequency 0-15, dual 0 - Max for that unit.
If you have another topcon radio that has a rs232 you can try to feed the corrections from the reach over 232, to the topcon radio.
What constellations are active in the dozer? The short manual says GPS, Glonass only.
What constellations are active on your reach?
What corrections are you sending from your reach?
I only have the short manual, is there a 232 port on the topcon unit for external corrections?
What are the external correction choices?
What is your ping over cellular to caster.emlid.com? what is the average? do you have any dropped packets?
What is the largest correction age you see when it rolls back to float?
Sorry for all the questions but computers are very particularly stubborn, they only accept the responses they are programmed to receive. Currently trying to figure out if this is a data communications problem or data validity problem.
The radio would help tons, I am sorry for bringing it up so much. But I have helped many people who sometimes forget they have an extra piece of hardware stashed somewhere.
If you can get rtcm3.0 information in a different way or port it will open up your options.
This dozer is the first piece of non-Emlid gps hardware we’ve purchased.
It’s running on Can-net currently, which is an ntrip provider that all the survey company’s currently use. The reason we are trying to swap to the RS2 base is to avoid $4,000/year subscription fees.
I’m going to try the settings that Emlid suggested above tomorrow.
Unfortunately I don’t know how deep into the settings I can get on the topcon side of things. The system is pretty locked down. So I need to exhaust my options on the base-ntrip side of things.
Any of the machine control posters on here have been through this to some extent.
I started with emlid trying to get a Trimble compatible base for my friends farm, and now I just started a Agricultural corrections business. As well as programming converters to work with legacy Trimble guidance systems. You may have to go very deep into settings, and learn more about RTK. The bigger GPS companies do not like losing easy money.
I am currently sending RTCM3.0 corrections to a topcon rover, in a caterpillar ag tractor without issue over cellular. Its performing better than the dealer provided corrections. Here is the customers picture.
Repeat yourself some more times. Maybe someone from emlid will understand.
The truth is that emlid doesn’t support 3rd party receivers so if you want a compatible base station you should look for topcon or other survey gear. If you find a Sokkia GSR2700ISX go get it, they are very cheap if you find one and it has ntrip server built in. I use Spectra Precision Epoch 35 as ntrip base with emlid caster and it works without interruptions unlike M2 that stops in the middle of the job. My conclusion is that something has to do with the internal position calculation of M2. I have a conversation with emlid but no resolution yet.