I am new to drone mapping. I need a solution to get the coordinates of all my GCP’s without having a known location point.
If I want to record my Drone GCP’s can I use a single RS2 or do I need a base station and rover? I have no public CORS network in my state. I can’t afford a NTRIP subscription of $500 / Mo.
I would suggest simply doing PPK with a known base in your area. Log your GCPs for 1-2minutes each with the reach view 3 app and be sure to have rover logging on. If you cannot afford the VRS subscription (by the way $500/year is quite cheap compared to most pay for networks), I would just post-process. What is your approximate baseline from where you intend to work/rove to the nearest publicly available base (that’s continuously logging of course)? What would be even better is to get a base/rover setup and process the base off the permanent public base and then process your Emlid base off the public base in Emlid studio (static). Then do stop and go processing using the rover log file against your base (but be sure to update the header with your processed Emlid base corrected position). Lastly, you’ll reference the genereated .pos file (with the corrected base position in the header) against the reach view 3 generated CSV. Boom. No need for RTK or NTRIP connections.
We are in the same boat in Texas. Personally I think it is 100% worth it but we are out there every day on 2 or 3 missions and not having to setup a base, let it bake and tear it down pays for itself quickly. Less time messing with transformations in the office as well.
To answer your question though yes you will need a base and rover at some point even if you have NTRIP to CORS.
“What is your approximate baseline from where you intend to work/rove to the nearest publicly available base (that’s continuously logging of course)? “
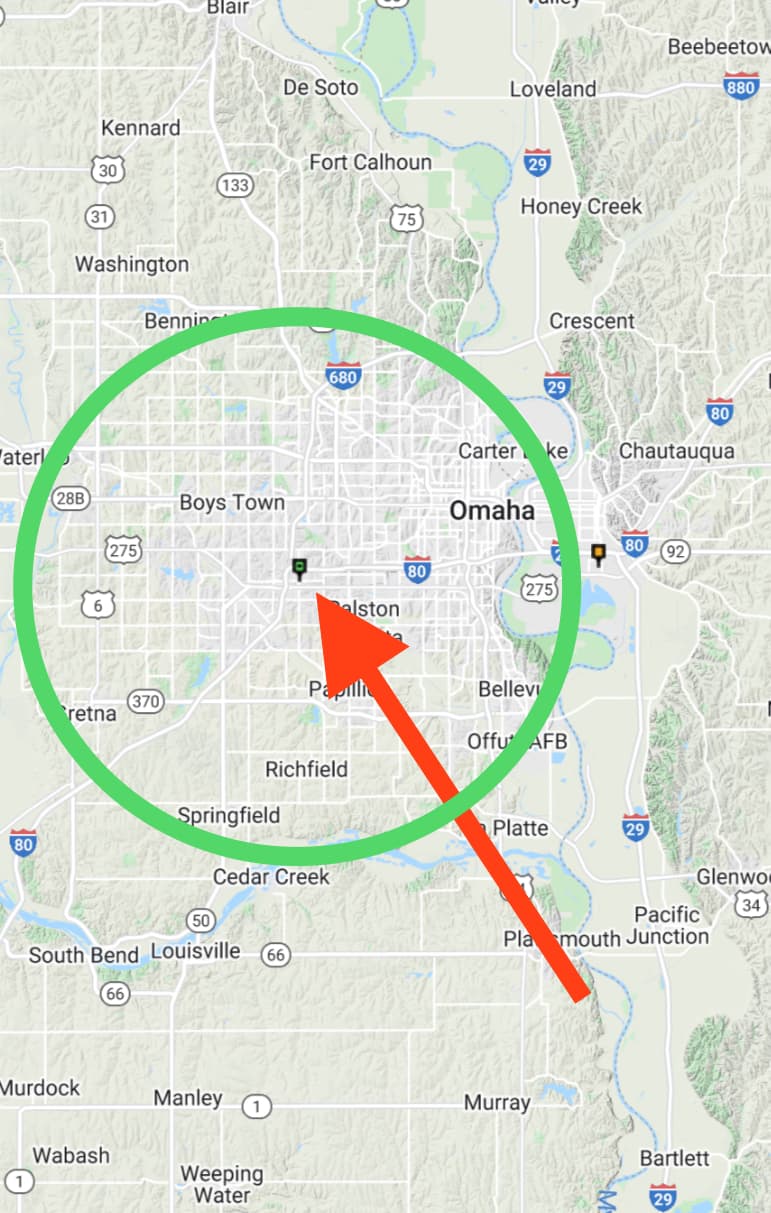
Most locations are within 10 miles of the Omaha location.
This is the log file from the local Omaha CORS site. Is this what I need?
“ What is your approximate baseline from where you intend to work/rove to the nearest publicly available base (that’s continuously logging of course)?”
Well that seems to be my problem. I live in Nebraska and I know of no public base. Is there some other source that I don’t know about? I’m told the The CORS network in Nebraska is private.
The least cost solution to you would be your own base. You don’t necessarily need a second RS2, an M2 with a weatherproof survey grade antenna (like the models from Harxon or Beitian if you want to save cost) will do fine. It can be installed indoors provided the antenna cable isn’t ridiculously long, and you can use a positioning service like OPUS or PPP to derive your personal base’s precise position. From there you simply need to keep it connected to the internet.
Emlid offers a caster service that will act as the internet middleman between your base and rover as long as the rover is also on the net.
The initial cost will be around 750USD, but then you’re independent. It’s not as fancy as a VRS network, but it works.
Thanks for that information. So you are essentially saying I can use the M2 as a base at a interior location like a business or home? Are there many resources for installing this? Would it need to be on the roof or could you do it in the attic?
From there you just let it sit and bake its position. Upload the file to OPUS then let Emlid Caster to broadcast to the rover via internet?
If I were to buy a second RS2 and take it with me everywhere, how long would I need to let that sit on a Job site in order to get a good reading for the OPUS process?
I never used OPUS myself, but it’s similar to PPP: it depends on the kind of accuracy you’re looking for. The longer the better. For the kind of use you describe, it’s much easier to tie in to existing survey markers. Their position should be publicly accessible and then you require no accumulation time. The drawback is that you have to leave your base unattended, which is not ideal.
As for the M2 base, there are a few users on the forum who have done it. The receiver itself is indoors but the antenna needs to be outside, ideally on top of a roof, with no obstructions to the sky. They often leave the units working 24/7.
Thanks! So I went to that CORS site and located the station closes to me. It look like you can select a log file based on a given time and import that into EMLID Studio as the base information? Is it that easy for PPK? You take the log for the rover, The Log for the NEOM CORS location (at the same time as you recorded thew rover data) and enter that into EMLID Stoudi. Then the software will run that data for your GCP’s?
Yes, that is also a completely workable solution and inexpensive as long as you have free access to a nearby station’s data. PPK is perfect if you have no need for real time correction. With an RS2 you have about a 100km range around that CORS.
All workflows suggested here are workable, so you need to choose just more suitable for you.
Of course, your own Reach M2 base will cost you some money and time to install and establish the connection. But you’ll be truly independent working with Emlid Caster in RTK.
The second option will take more time to post-process your data in Stop&Go PPK. Also, maybe you will need to redo the survey due to unexpected errors that you will notice only in post-processing. However, it doesn’t require additional costs.
I have one more question. If I were to decide to go with the PPK solution and just get a Rover, do I need the RS2 or can the RS+ work for that as well. What is the main advantage of the RS2 over the Rs+?
Chris, you need both units with the capability of dual freq, like 2 RS2’s or RS2 and M2. Dual freq and single freq receivers can work together, however the dual freq receiver will need to be used as a base and the single freq receiver as rover. With the single freq receiver, you’ll have longer occupation times on station and will be limited to very clear open skies with no obstructions. Single freq receivers don’t like any kind of multi-path.
I use my M2/Harxon GPS500 anyenna as rover with my RS2 or Javad Triumph 2 as base. The M2 is cheaper than another RS2 and is a very capable receiver with a proper antenna. Also, I would use the base on site in a secure area. You will have shorter baselines and more accurate positions than using a realtime RTN/VRS system. Short baselines are your friend in the GNSS world.
As far as cost for a subscription to our state’s RTN system, it’s very reasonable at $50/month or $600/year. However, if you’re in an area with limited or no cell service, it won’t work.
Thanks for the feedback! What is a good Real Time Network subscription service to use? When I looked it said $500 / Month. Maybe I was reading it wrong?
What is the best way to secure the M2 on the rover Pole? I assume you also need a portable battery for that power? Is there a bracket that can be used that holds both? Does that antenna just screw on to the top of the pole?
I personally went with 3D printed brackets. If I stop procrastinating and finish the cabling, I’ll be able to show my M2 enclosure solution that fits on Harxon GPSxxxx antennas to make it into a rain-resistant rover.
Here’s my setup with Harxon GPS500. I keep the receiver and battery in the small blue bag. When finished measuring, I put the antenna, cables and blue bag (with receiver/battery) in my hip bag. It all fits in the hip bag. A lot of users have indicated that their receiver gets extremely hot, however mine gets warm but not hot enough to not touch. If there’s bad weather predicted, I’ll put the receiver in a Ziploc bag. The setup has worked well for me the last two years
I’ve got two M2’s and usually I’ll use them as a static baseline with my Javad Victor LS rover. I use the RTN with the rover but there are places where cell service is marginal. If I lose cell service, I can still use the rover collecting static positions as I can PP later in the office with both the M2’s. I’ve got a closed loop with all three receivers with short baselines and this also verifies my RTN rover positions. Usually my baseline distance between the M2’s are <1km and distances from the rover to the M2’s are <2km, however sometimes they’re longer. You’ll learn short baselines are you friends !
I use this method on large boundary survey projects locating creek boundaries, roads, property corners etc. I always know I have accurate repeatable positions with closed loops. I’ve caught many bad locations from previous Surveyors who take chances not verifying their survey positions, especially using their receiver in high multi-path areas (woods). This new breed of Surveyors take too many chances not verifying their locations.
I really like my M2’s… I’ve always wanted a simple small receiver for static purposes.
It’s possible to work with Reach RS+ in PPK with logs from CORS. But talking about the advantages of Reach RS2, it’s a multi-band receiver, while Reach RS+ is a single-band. So, Reach RS+ requires a clear sky view without any obstacles to operating correctly. In comparison, Reach RS2 can work with some buildings or trees nearby. Also, Reach RS+ supports a 30 km baseline in PPK compared to 100 km for RS2. I’d recommend checking our Single-band VS Multi-band guide or YouTube video to get all differences.
If you want to use Reach M2 on the survey pole, Bryan and Gabriel indeed shared good examples of such a setup.