



Sorry to answering himself: Finally in Autel enterprise with Explorer 1.0.59 It is possible to input custom NTRIP, also manual mount point (not only from list). Also in FW 2.1.57 there are proper RINEX observation data (not only header). That is registered only when FTASK folder is created. Then from first photo in mission. Greate upgrade.
Hi,
Thanks for posting the news! Good closing for this discussion 
rccam - thanks for that posting. I’ve been on the road and haven’t had time to follow up. The Autel tech support fellow responded to my follow up query a couple of weeks ago that they were still working on it. And it appears to be fixed now, that’s great! I’ll try it this week. Very excited if I can use the Emlid Caster with my Autel RTK rig.
On my trip to the US east coast (Maryland) I tried out using Hexagon’s SmartNet with my Emlid and separately with the Autel RTK rig. Both worked great. For the Autel doing RTK with SmartNet, I was getting a reported 1.2 cm horizontal and 3 cm vertical accuracies. Sadly, on that quick mission I didn’t have time to place any Checkpoints to verify accuracy with the mapping. This week I’ll try that back out on the US west coast.
Next up, I try some post processing with the RINEX file out of the Autel to see if that is really real.
I continue to be happy with the Autel Evo 2 pro RTK, especially now that they have (allegedly) fixed the software shortcomings. I keep looking for artifacts/problems that are created by not having a global shutter, and I cannot find any. I use Pix4Dmapper and it has some corrections for non-global shutters, so maybe it is automagically fixing it for me. Don’t know.
Thanks for the input, everyone.
@mark5 We are currently testing enterprise, and also can confirm that emlid caster working great. Tested both L1 and L1/L2. On only L1 what is predictable there is only Float state, but still posiible to postprocess as PPK. Only one except that probably RTCM stream for Glonass don’t work (for now I don’t have receiver to check but that is probably RTCM 1084 messages)
Are You using the standard EF7.2/7.1 controller? Unfortunally, for now we did not check if Autel explorer version for standard Android/iOS device also were upgraded.
Accuracy in this situation is really dependent from distance to Base. We achived 1,5-5cm with different NTRIP streams.
We are using Autel II Pro in surveying applications for a year and shutter isn’t a problem.
Hello Marco,
did you manage to connect your Evo 2pro Rtk with the RS2 base?
I would be grateful if you would help me understand if linking is possible. Thanks
That shouldn’t be a problem if you can cast it. It will not work as a local base.
Hi Antonio,
While we’re waiting for Marco’s feedback, do you experience some issues with the connection? As I see from other users’ comments, it’s possible to do using Emlid Caster. But you need to work on the latest update that allows entering the mount point name.
Hi Svetlana,
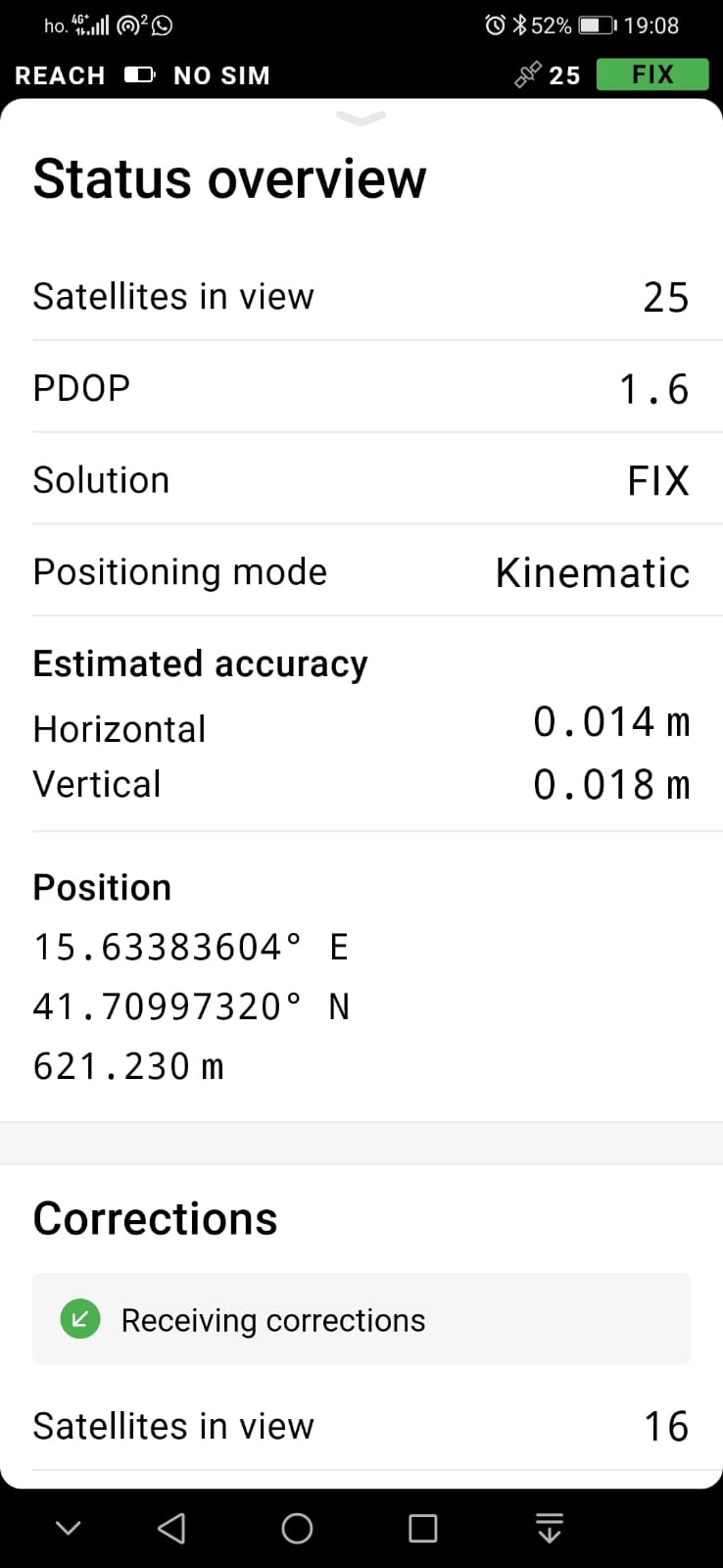
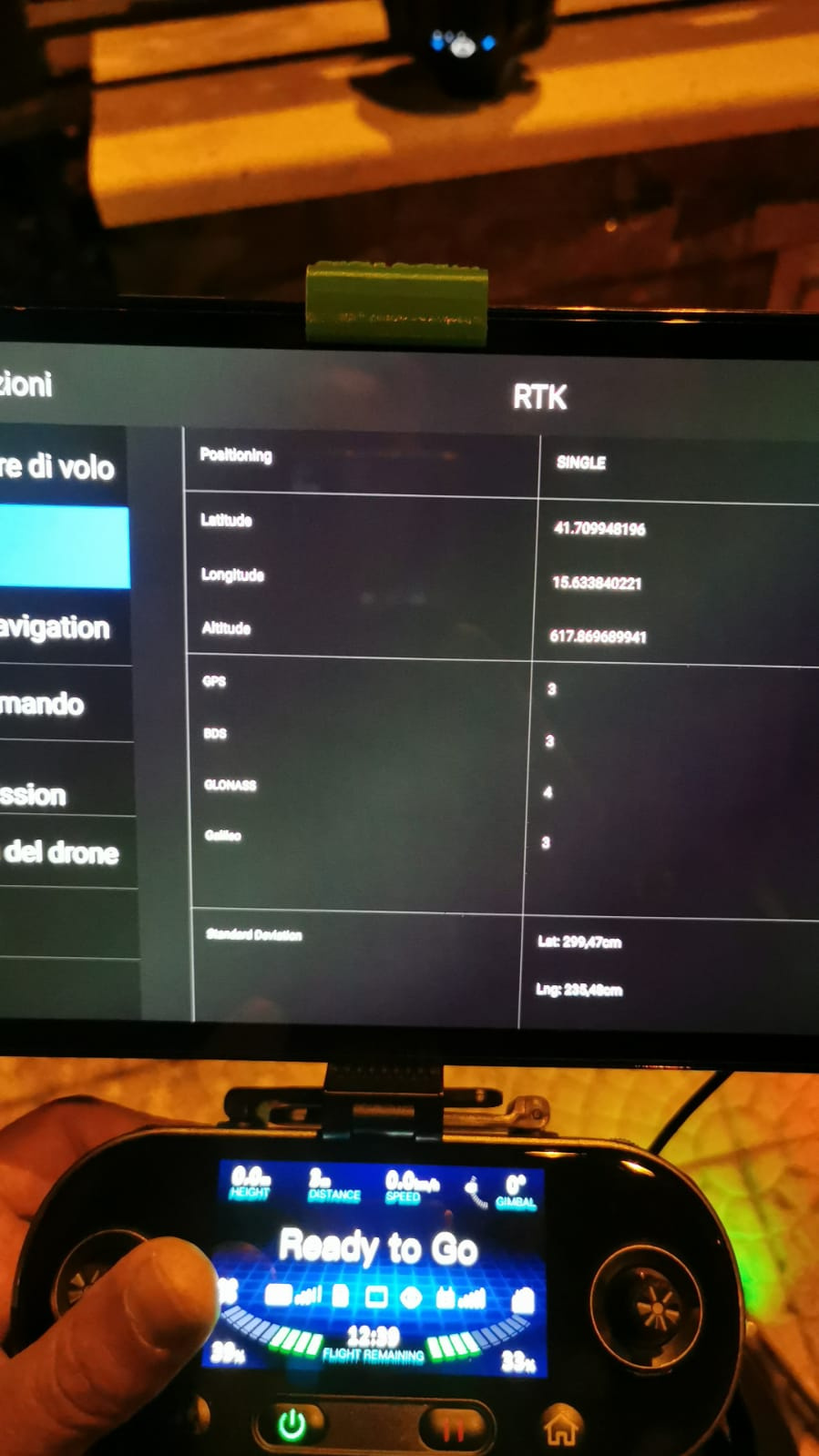
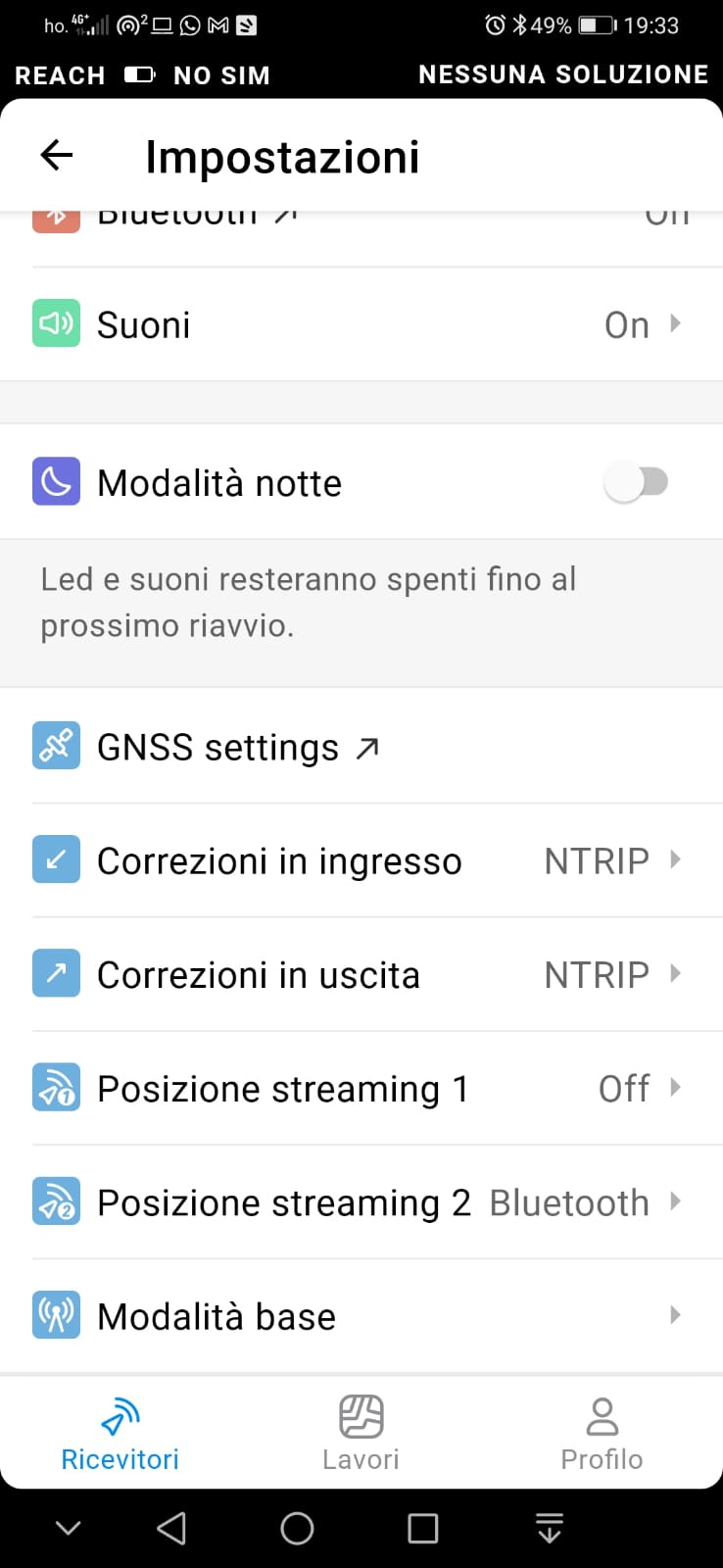
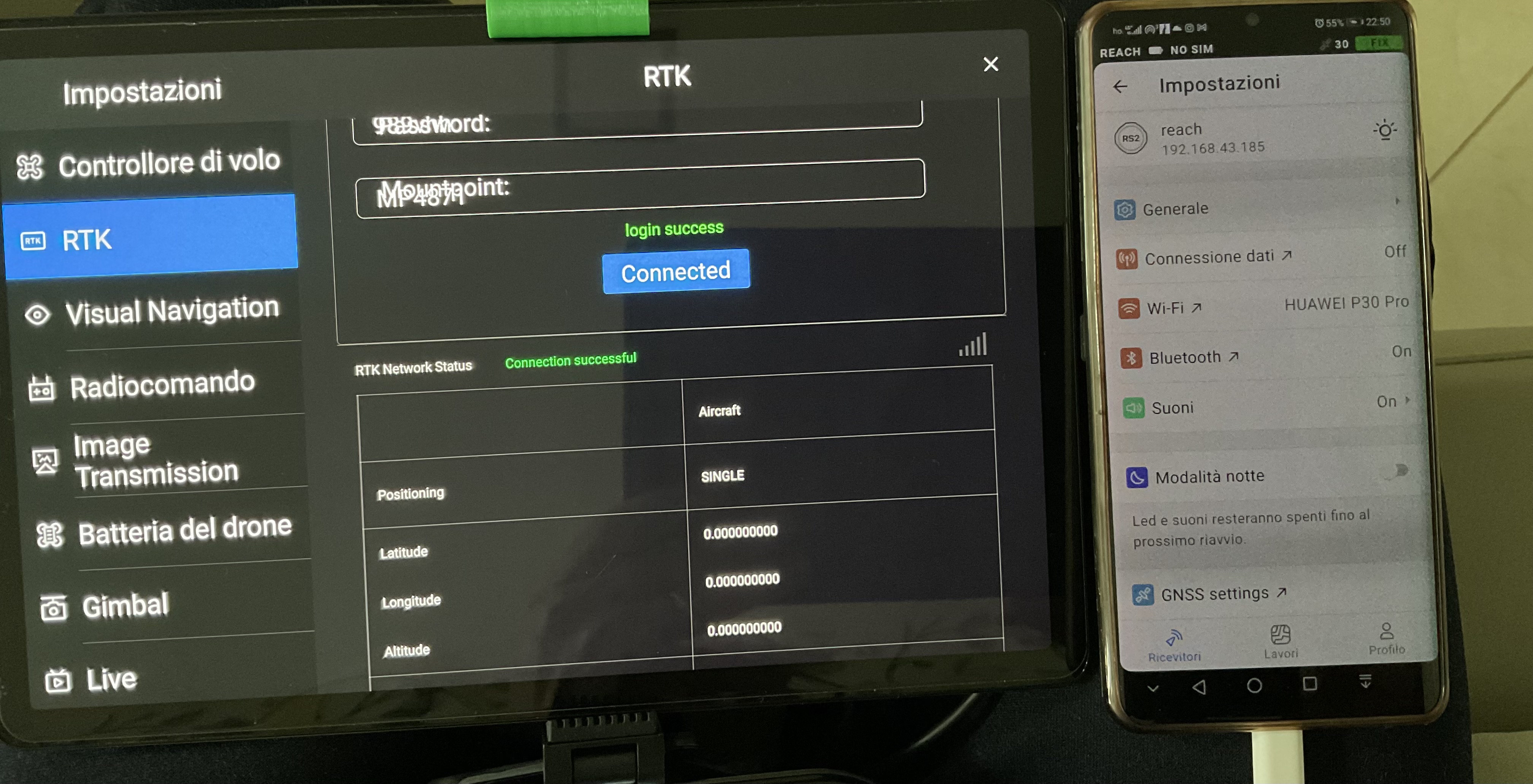
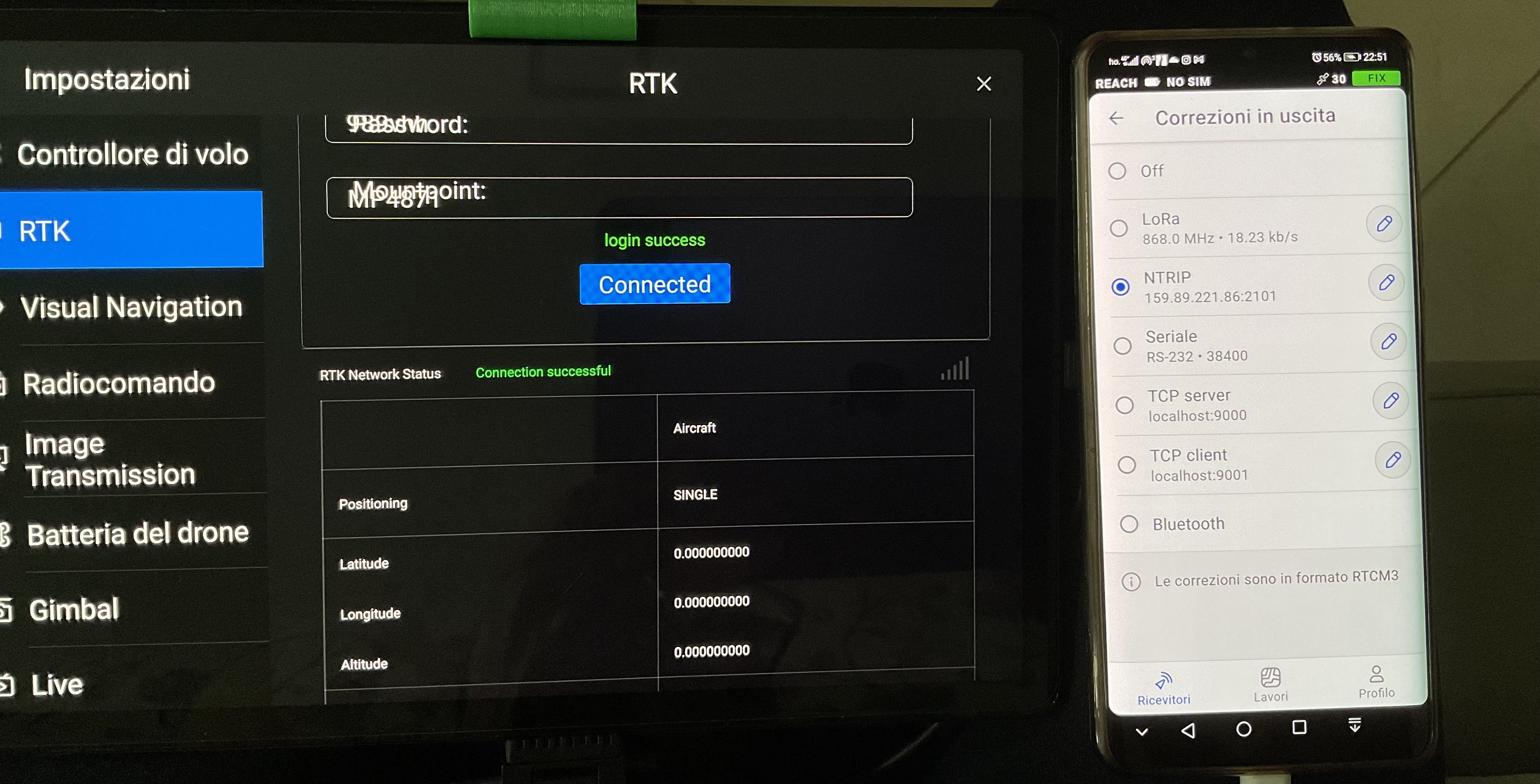
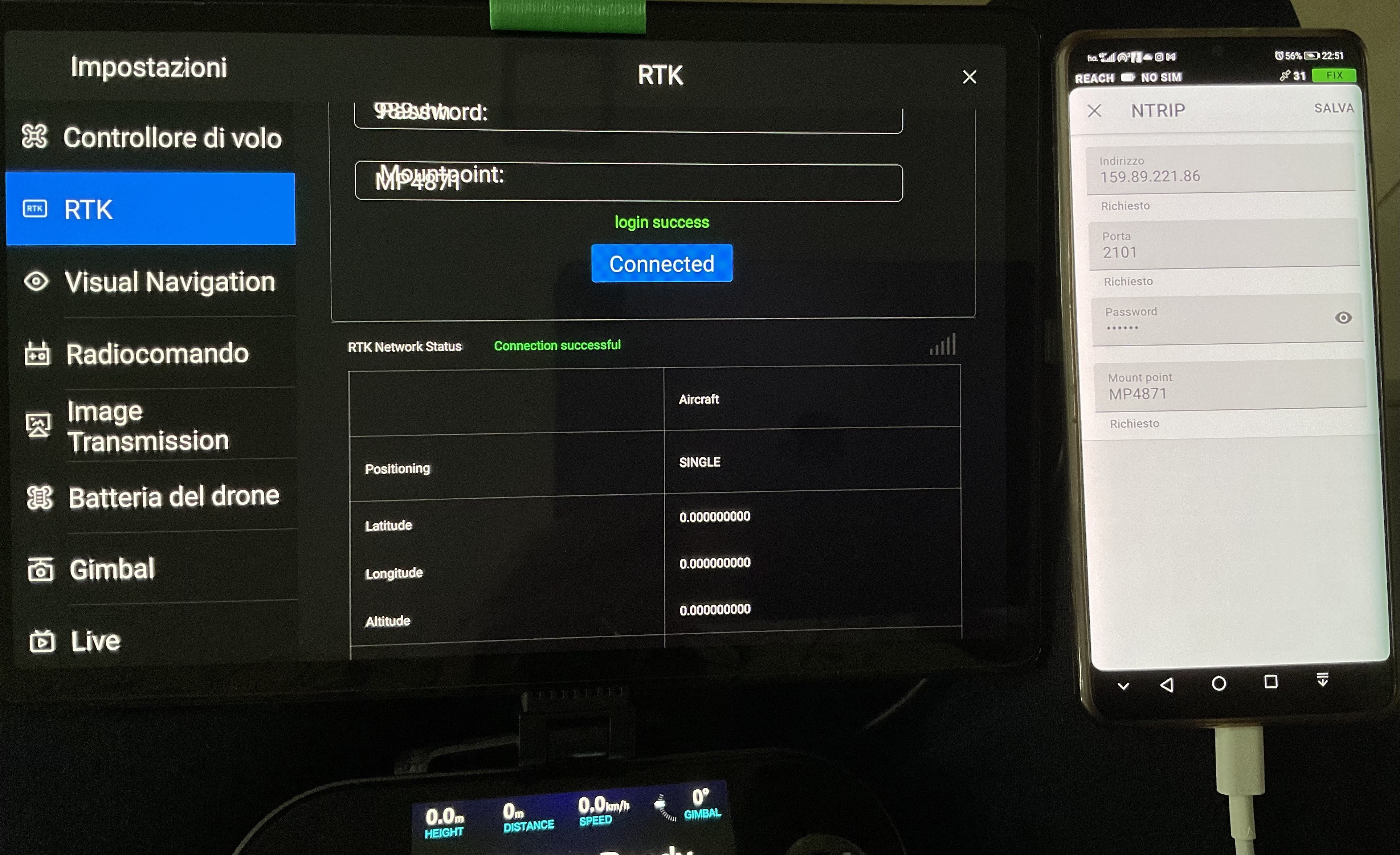
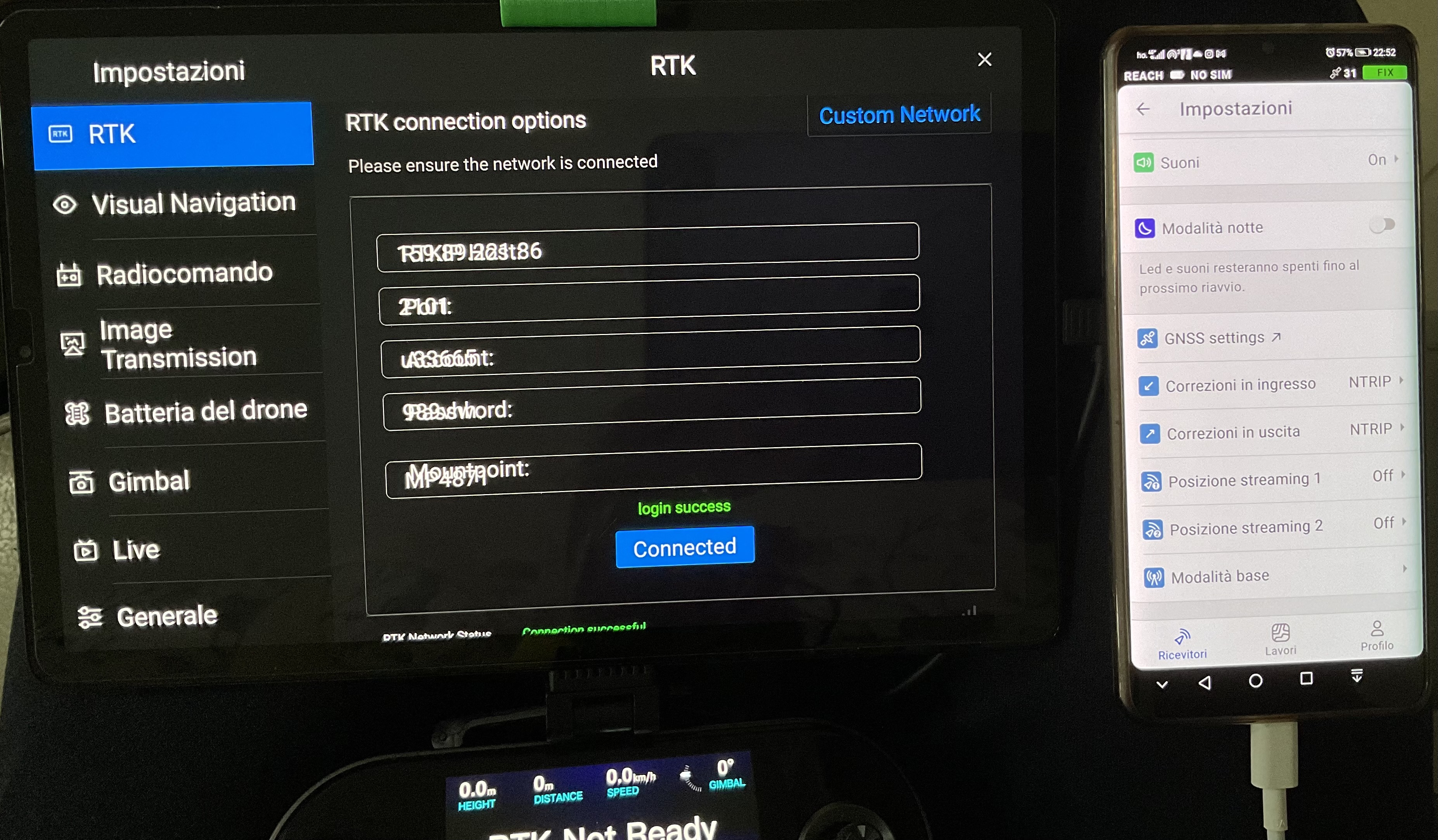
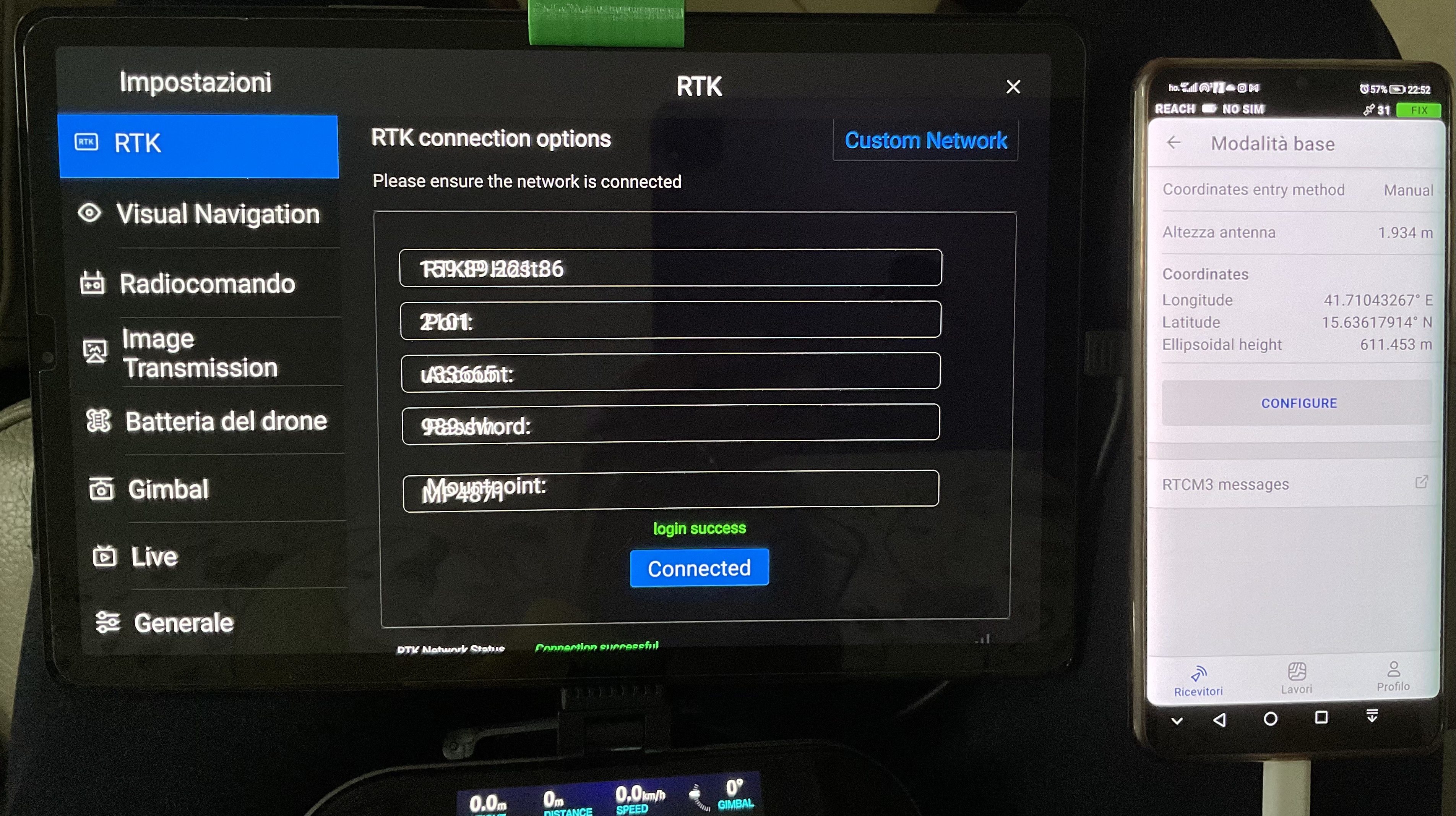
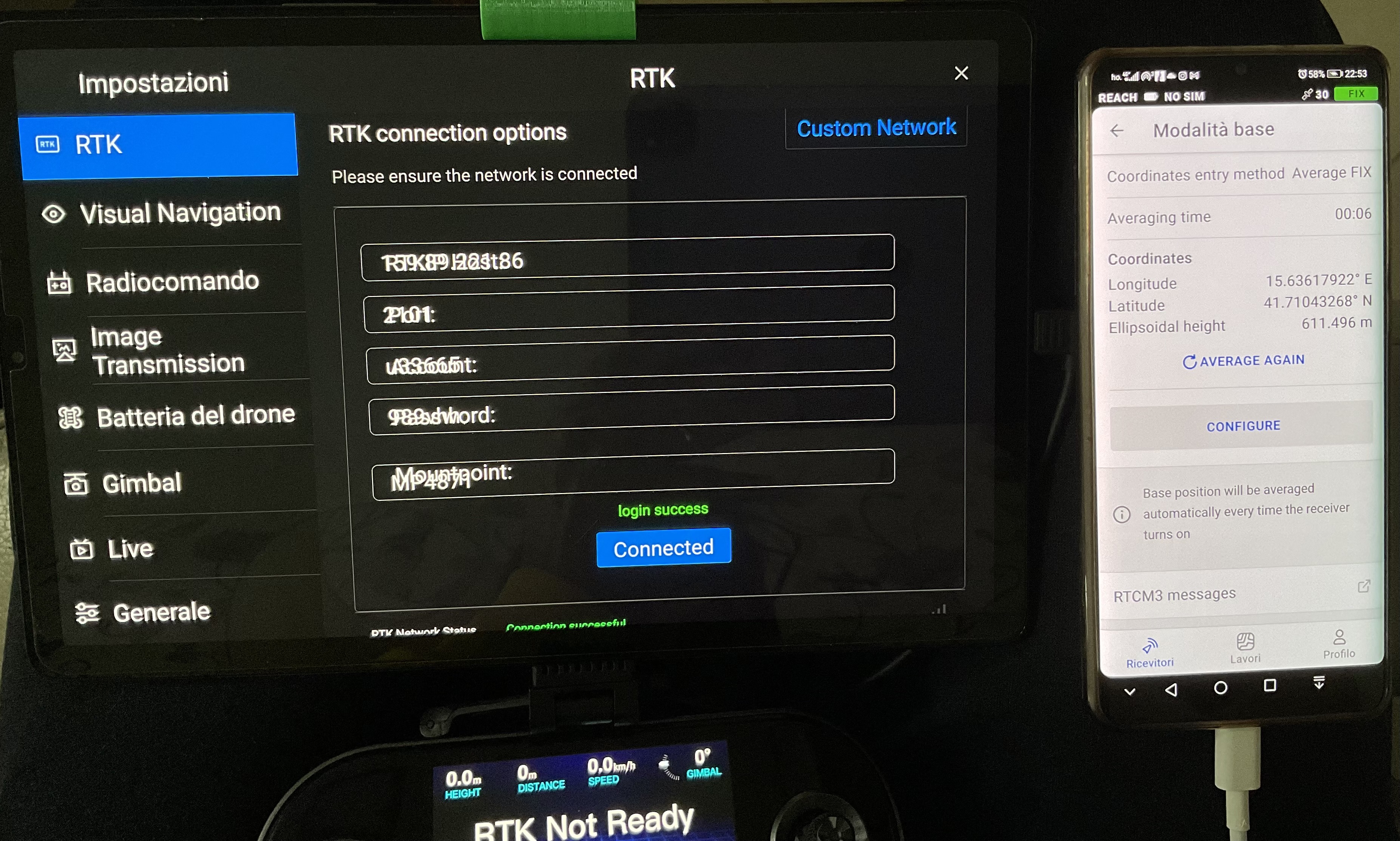
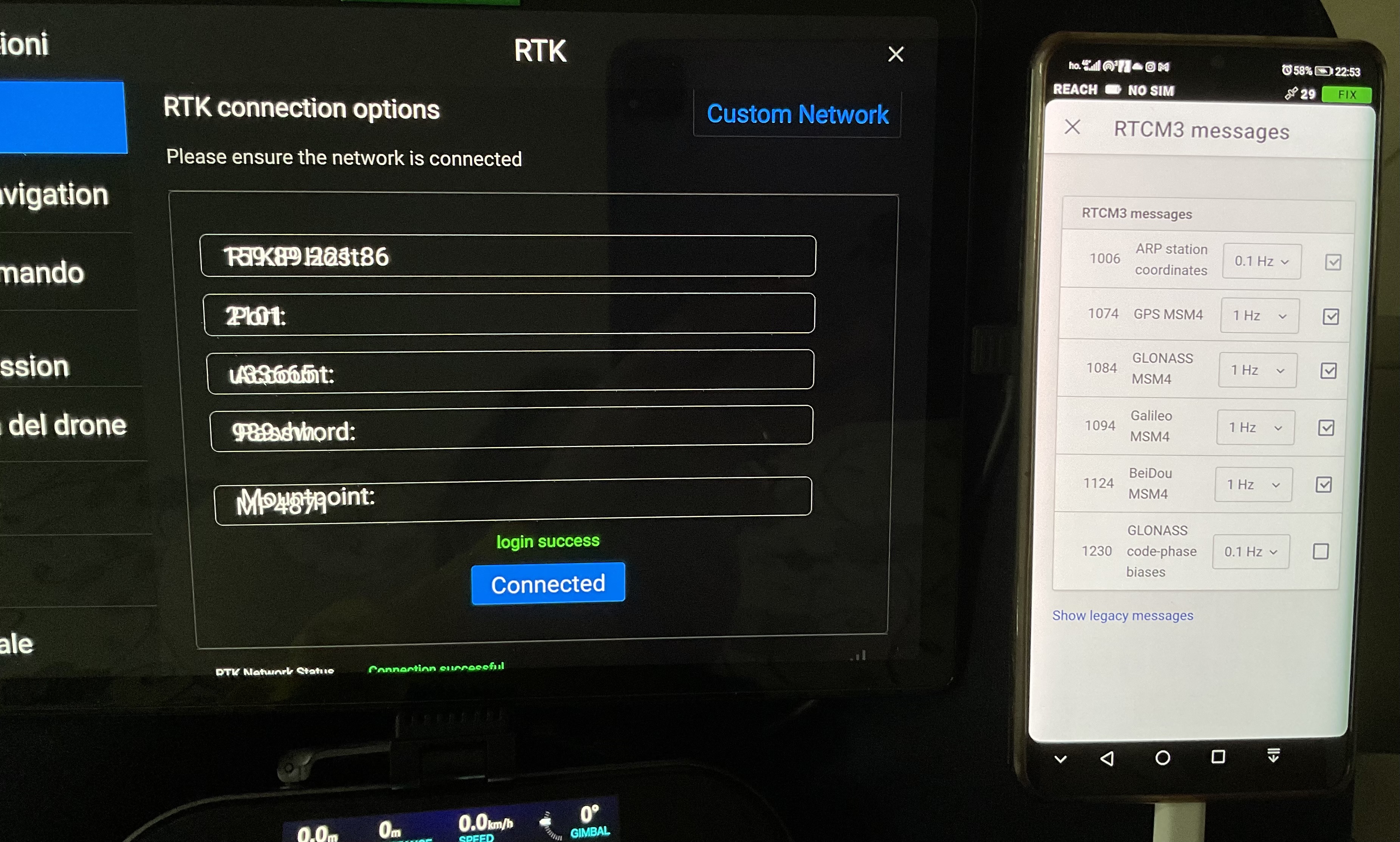
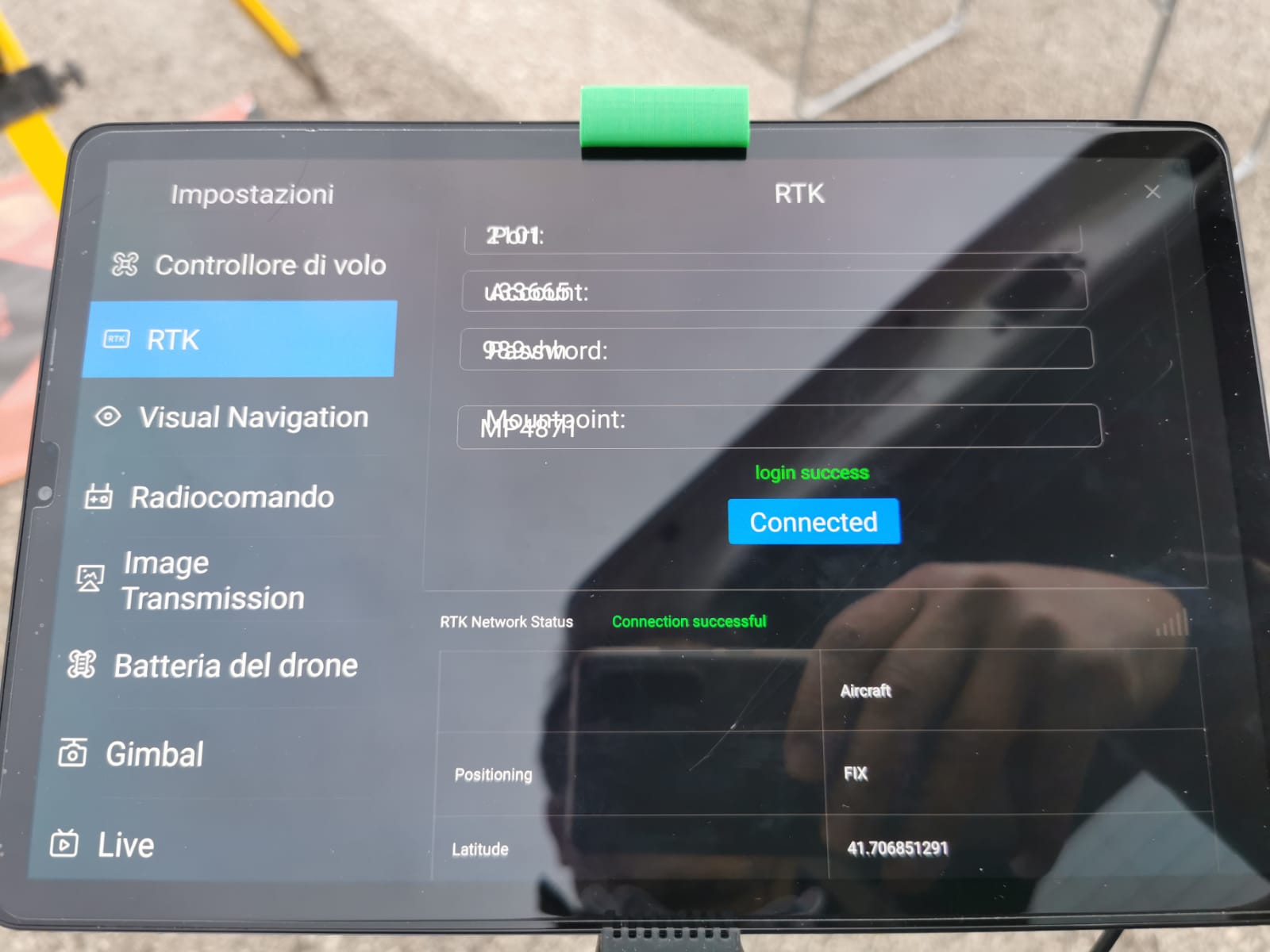
yes i am using Emlid Caster and uo updated my Autel Evo II V2 RTK to enter the mount point name and I succeeded. The only doubt is that while my RS2 was in Fix (photo1) my UAS Evo II was in single (photo2) … I think it’s right but I’m not sure. Also on the Reach application do I have to have the NTRIP input and output correction or should the correction only be present at the input? (photo. 3).
Thanks
Ciao Svetlana,
si sto utilizzando Emlid Caster ed uo aggiornato il mio Autel Evo II V2 RTK in modo da inserire il nome del punto di montaggio e ci sono riuscito. L’unico dubbio è che mentre il mio RS2 era in Fix (foto1) il mio UAS Evo II era in single (foto2)…Credo sia giusto ma non ne sono sicuro. Inoltre sull’applicativo Reach devo avere la correzinone in ingresso e in uscita NTRIP o la correzione deve esserci solo in ingresso? (foto. 3).
Grazie
Antonio,
In ReachView 3, you need to set the Correction output only. In that case, Reach RS2 will work as a base. On the Emlid Caster page, there are two types of credentials:
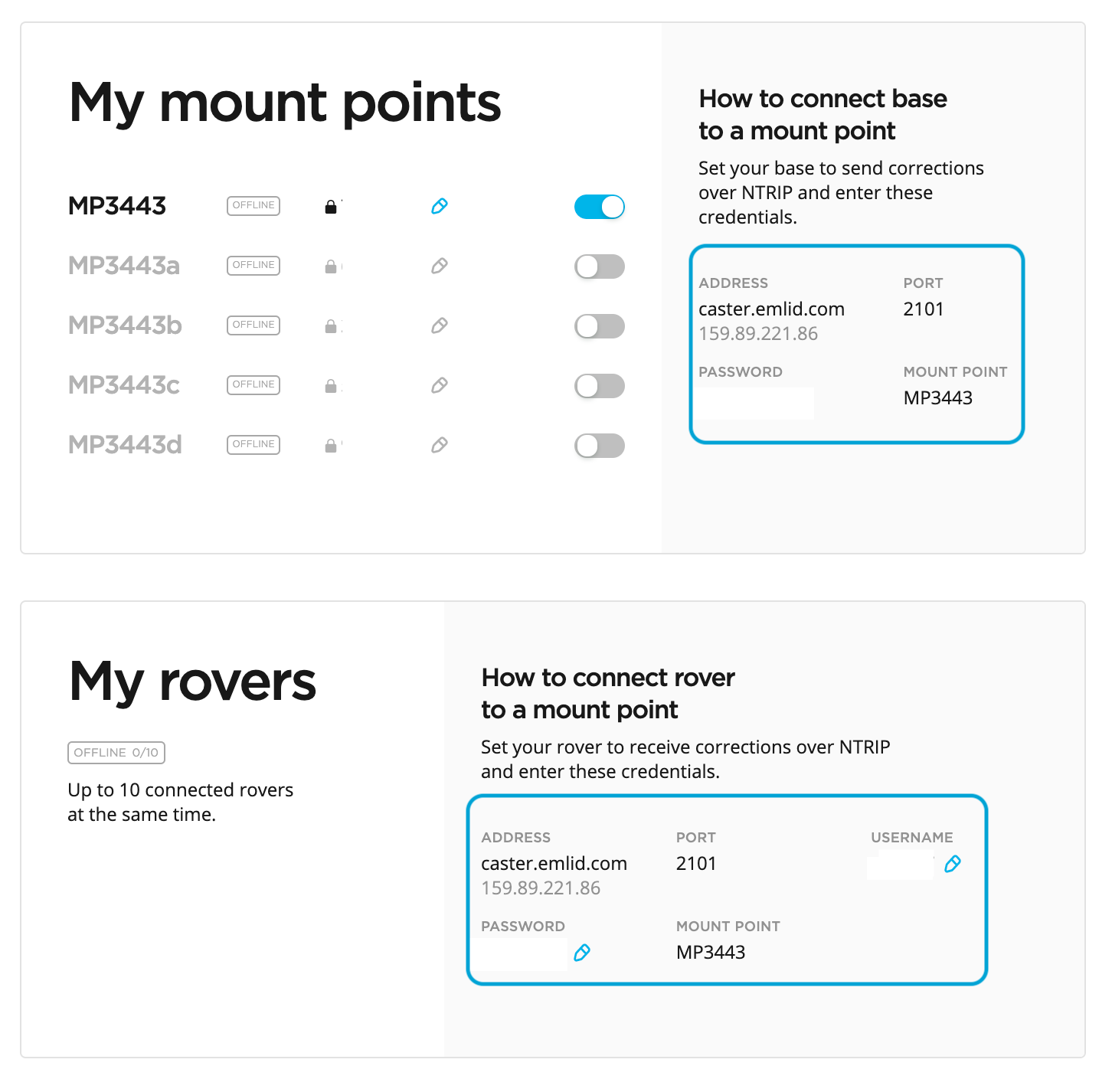
The ones above are to fill in the Reach Correction output settings. And the second ones are for your drone’s configuration.
Your Reach RS2 currently works as a rover. The Fix solution status means it has centimeter-level precision.
Salve,
si sono riuscito a collegare il drone alla base ma la soluzione nella base è in fix mentre sul drone è single. Credo che bisogna fare qualche altra configurazione sul ReachView.
Hello,
I managed to connect the drone to the base but the solution in the base is in fix while on the drone it is single. I think we need to do some other configuration on the ReachView.
Salve,
stavo pensando, se devo impostare nel reachview l’altezza e le coordinate della base, per poterla far funzionare come tale.
Grazie
Greetings,
I was thinking, if I have to set the height and coordinates of the base in the reachview, in order to make it work as such.
Thanks
Antonio,
Hmm, did you disable Correction input on the base? It seems to receive them still.
You can share screenshots of new settings, and I’ll point out what exactly should be changed.
Even if you didn’t set the base coordinates manually, they are. ReachView averages base’s coordinates each time you turn the device on. They may not be that accurate, but it doesn’t affect a rover’s solution status.
Grazie per l disponibilità.
Ho eseguito la connessione sia con la base di correzione input spenta che accesa. Ho impostato le coordinate della base cnn la sua altezza, ho spento l’ingresso NTRIP ma non è cambiato nulla. Ti allego delle foto sia con la correzione input off che con la correzione input on. Spero che tu mi possa aiutare. Intanto ti ringrazio molto.
Saluti
Antonio
Thanks for your availability.
I connected with both the input correction base off and on. I set the coordinates of the base with its height, I turned off the NTRIP input but nothing has changed. I am attaching some photos with both the input correction off and the input correction on. I hope you can help me. In the meantime, thank you very much.
Greetings
Antonio
foto.zip (8.2 MB)
I’m having a hard time following what is going on here. The local “base” is fixed via NTRIP? Why wouldn’t you just connect the drone to the NTRIP? If you are trying to Emlid cast the base so that the drone can use it via NTRIP then it should have a manual coordinate set and no input corrections. Correct? I don’t see a base mode tab show correction output as NTRIP.
2 Likes
Antonio,
Let’s start with disabling Correction input in ReachView 3 at all. After that, Reach should go to Single and your drone to Fix.
If it doesn’t happen, ensure that you use the right credentials on the drone. You need the ones listed under My rovers:
Good morning everyone, sorry but it has been a while since I have not followed the updates of the group. Unfortunately I have no news and I was unable to connect the RS2 as a base to the Evo pro2 rtk. I see, among other things, that Antonio has made many interesting tests. The company that sold me the drone and with whom I am constantly in contact has tried to do so but without success. At the moment it seems that the only gnss system capable of serving as a base with the Evo 2 pro rtk is from another brand. But I hope that somehow we can manage to make it work with the RS2 as well. It would really be a useful thing that would open up a lot of market scenarios. Also because I think Autel are quickly overtaking DJI. I keep following if there are any updates. Thanks
There really is no reason why this shouldn’t work unless there is something wrong in the coding of the Autel programming. I wish I had access to one but I might be able to find another drone pilot with Emlid and Autel…
Haha. Highly unlikely but that would be a welcomed day.
Hi Svetlana,
thanks to your indications I succeeded.
Tomorrow I will do other tests to understand what deviations there are.
thanks a lot!!!


Ciao Svetlana,
grazie alle tue indicazioni ci sono riuscito.
Domani faccio altre prove per capire che deviazioni ci sono.
grazie mille!!!
1 Like
That’s good stuff! I knew we could get it going. Now I have a new drone to buy and get away from the Phantoms. I looked at the new Mavic and it’s obvious that they are pushing all their mapping to the M300 RTK. We will probably get one of those as well but we still need something for small jobs.