If you’re using ReachView 3 to set the NTRIP settings, all should be well. Usually, it’s a little configurational error that leads to such issues. So let’s get the most obvious out of the way:
in case of using Emlid Caster, check that base is online in your dashboard (when it transmits corrections)
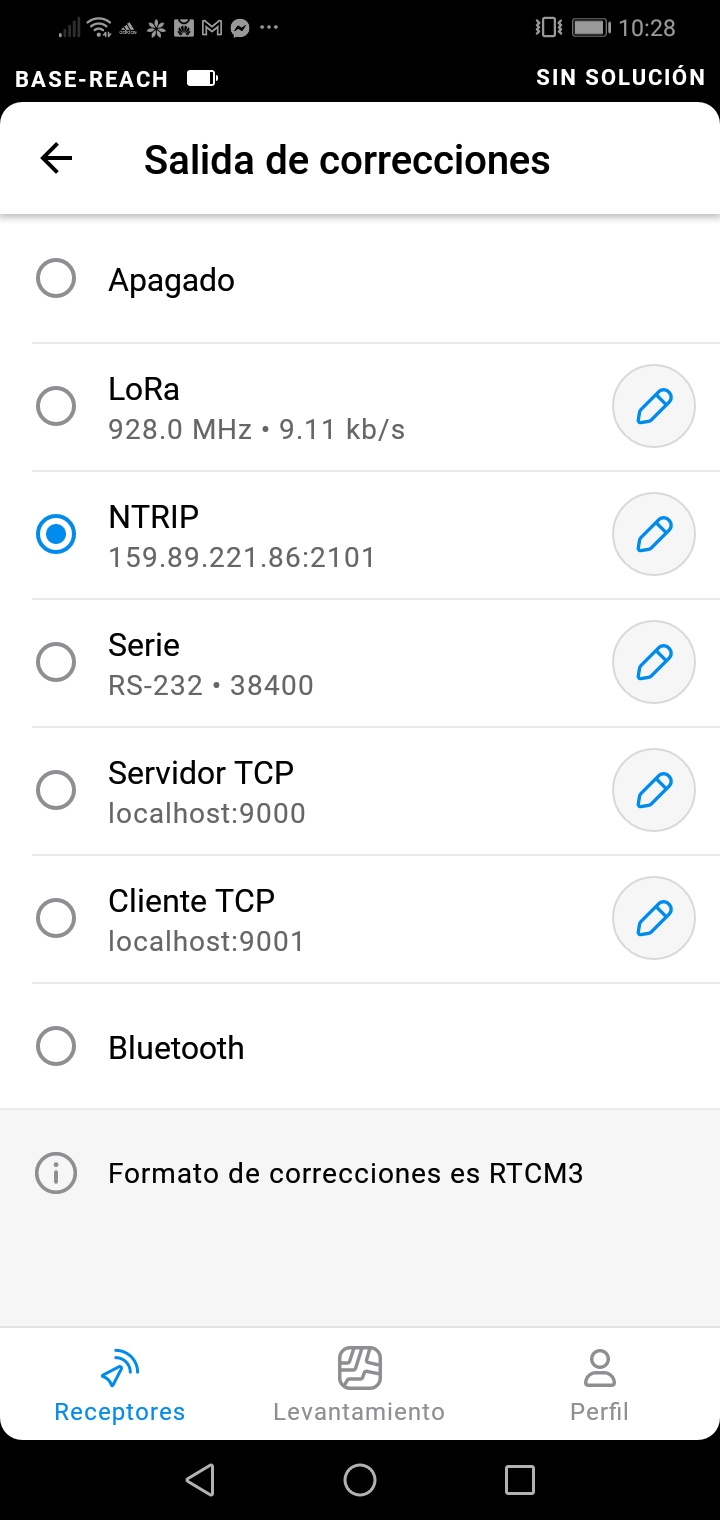
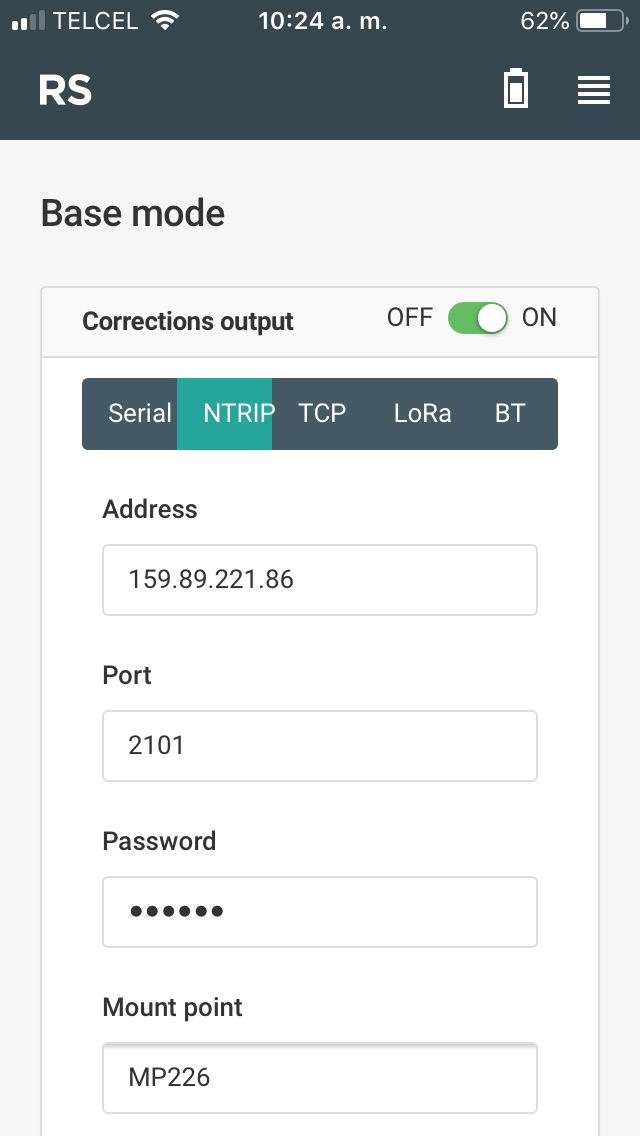
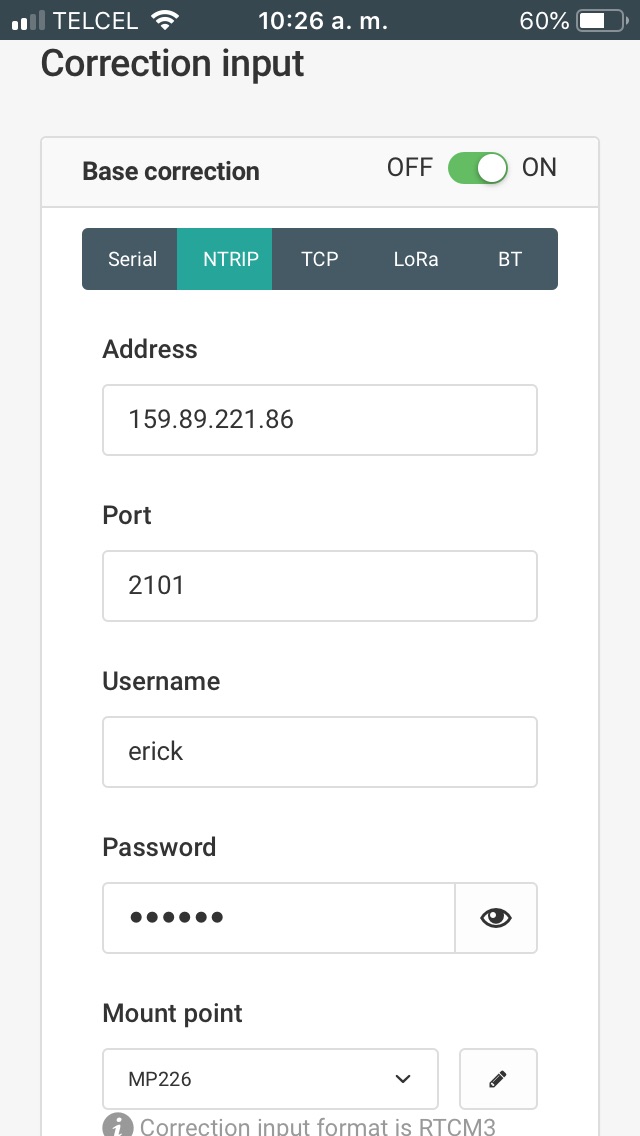
double-check the credentials; it’s also vital to keep the mount point spelling the same on both rover and base
If all is fine with these, see if you can get the corrections on any other device. You can swap the receivers, for example, so that they change their roles.
In case nothing changes, please, share the simple system reports from both units with me. They can help me see the current settings on the units. I’ll see if something is askew.
I just updated to 27.1 and I too have lost ntrip corrections. Both devices are connected to the same hotspot that I ran our first Rover off of and NTRIP shows connected. Satellites show up for the Rover but none for the base. Additionally when I tried to change the communication to erb for fieldgenius it says write error.
It seems that all I have to do is post a question on this forum and I find the answer in milliseconds. The mount point defaulted to rtcm 2 instead of 3. I switched to 3.1 and got a fix within 5 seconds. I’m assuming it is 3.1 correct? And not 3.2? Unfortunately I don’t have the other rover in my possession. I guess I should write down stuff like that.
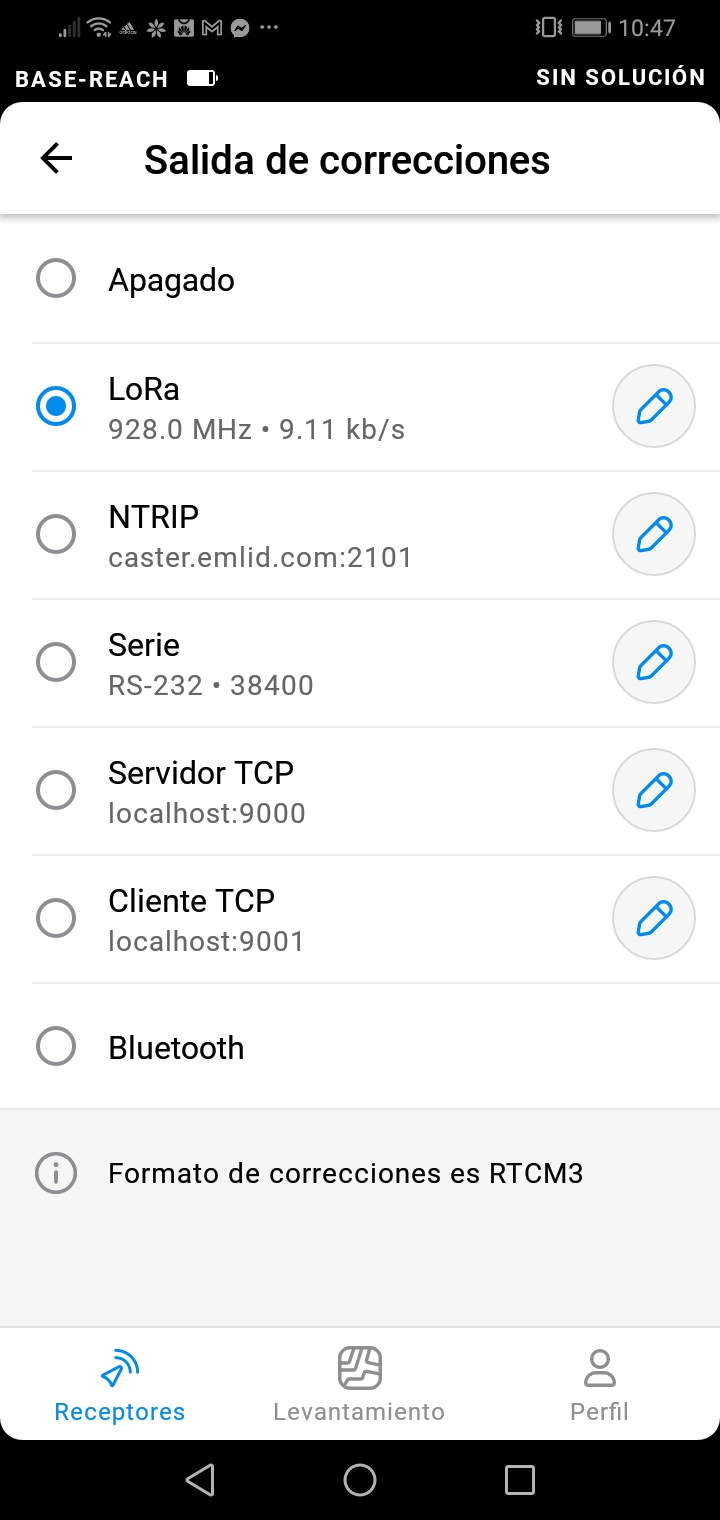
Indeed, the different formats of corrections can be at fault as well. We’re working with RTCM3.2 only, not RTCM2. That’s what’s needs to be kept in mind.
Thanks for the screenshots! They help us with the mysteries faster.
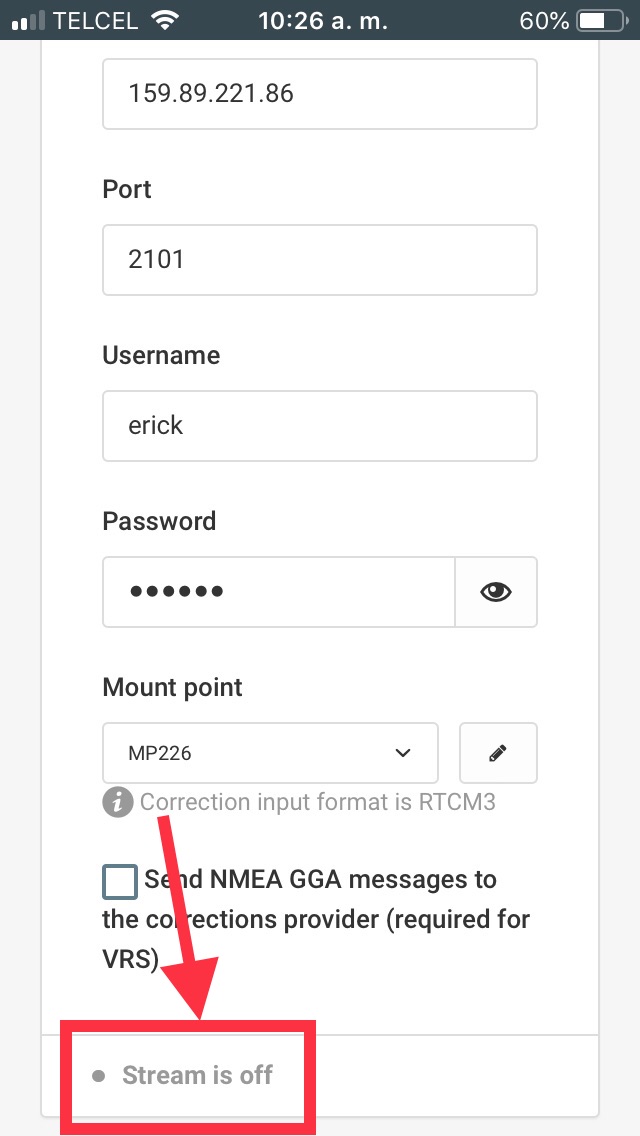
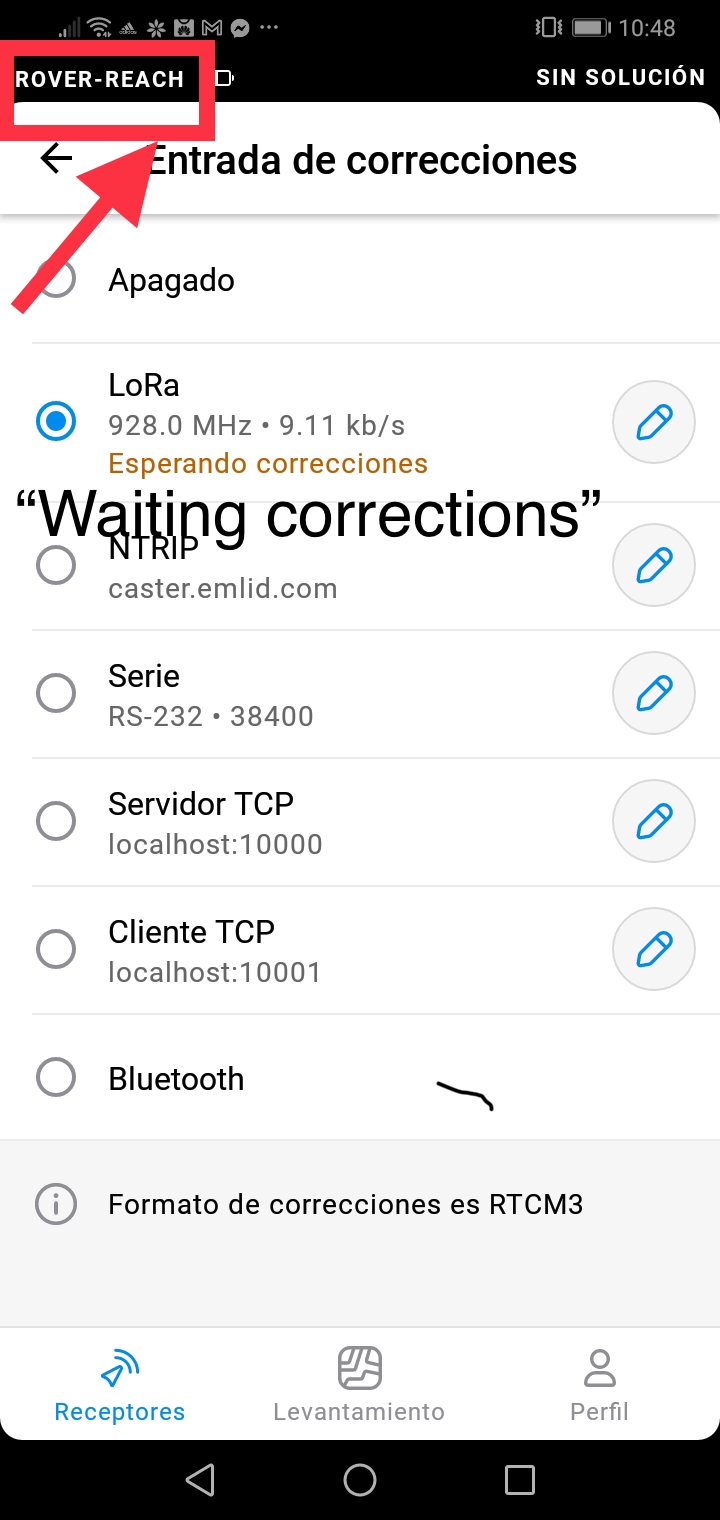
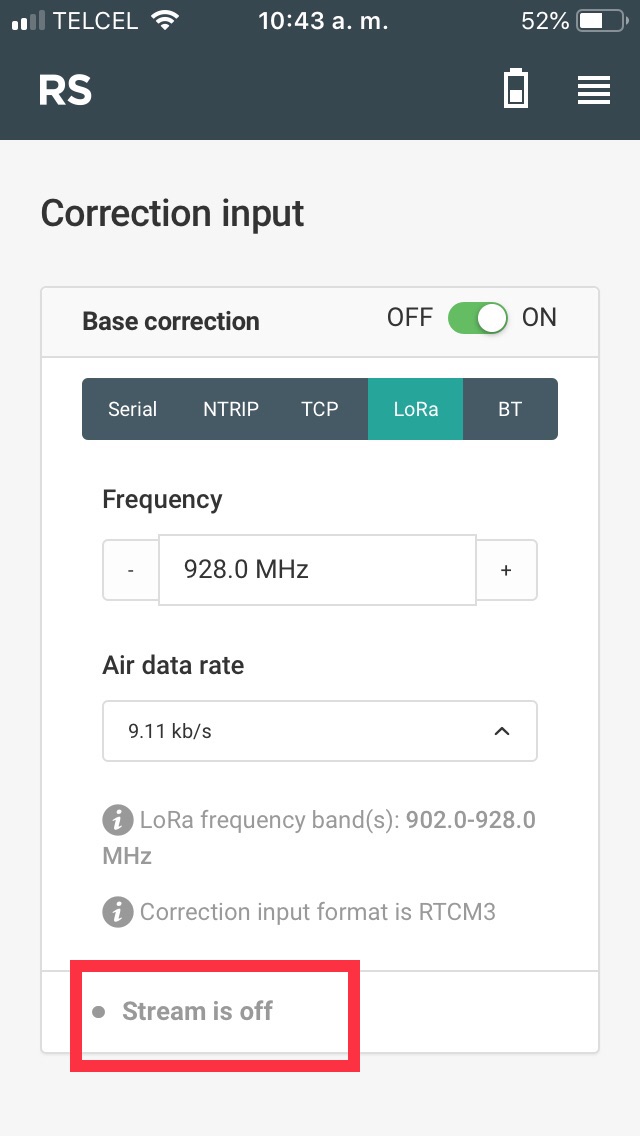
Currently, on both of your devices, there is No Solution status. This means that none of them see the satellites. This way, base indeed sends nothing: it sees nothing. As the stream is not established, you get errors with the caster.
So to get a fuller idea here, I’d suggest going outside and establishing at least Single on both devices. This way, when you connect both units to the Internet, we will at least be sure that the base sends the corrections.
Also, I deleted the screens with your caster details. They helped a lot! But these are your personal credentials, it’s usually better to keep them private.
Ok, v3.1 appeared to be working but i’ll switch to v3.2. Thank you.
*edit - I just went to change the setting and realized our NTRIP only has v3.1 for VRS. They have another mountpoint showing v3.2 but it is annotated as G3 so i’ll need to find out from them what the difference is. Does it matter?