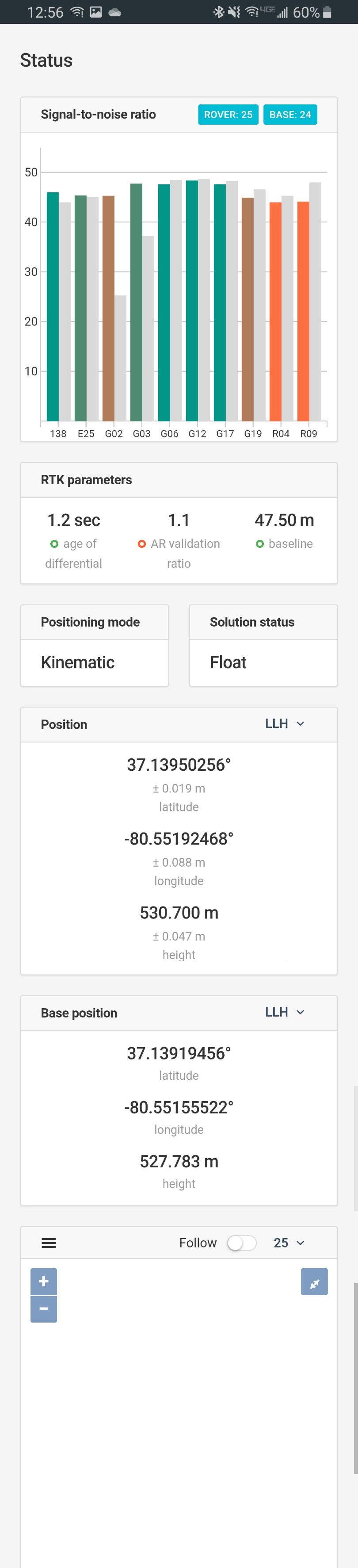
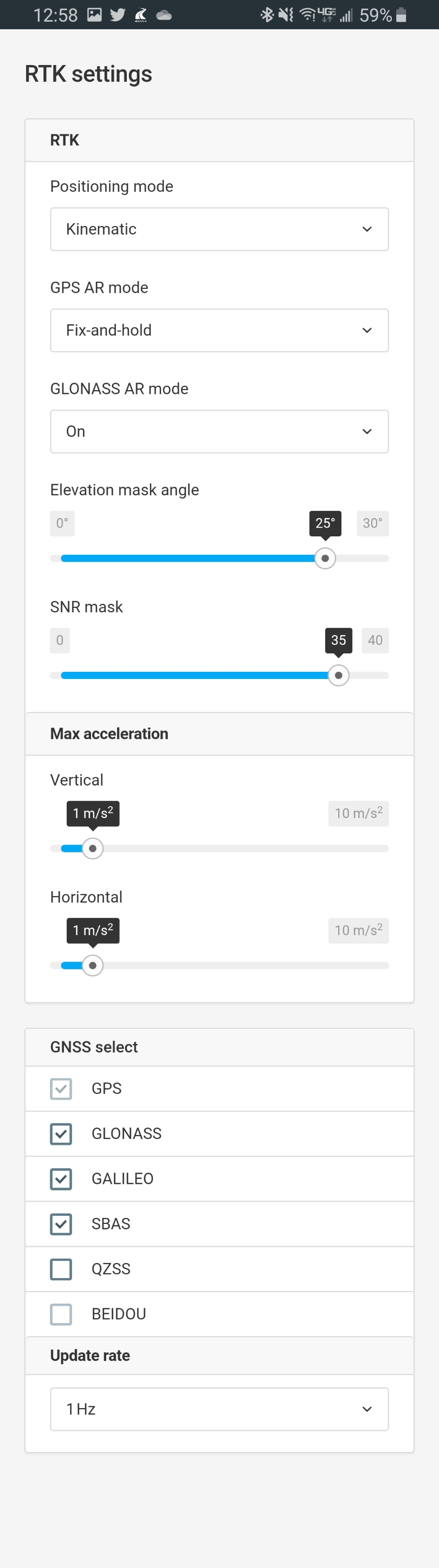
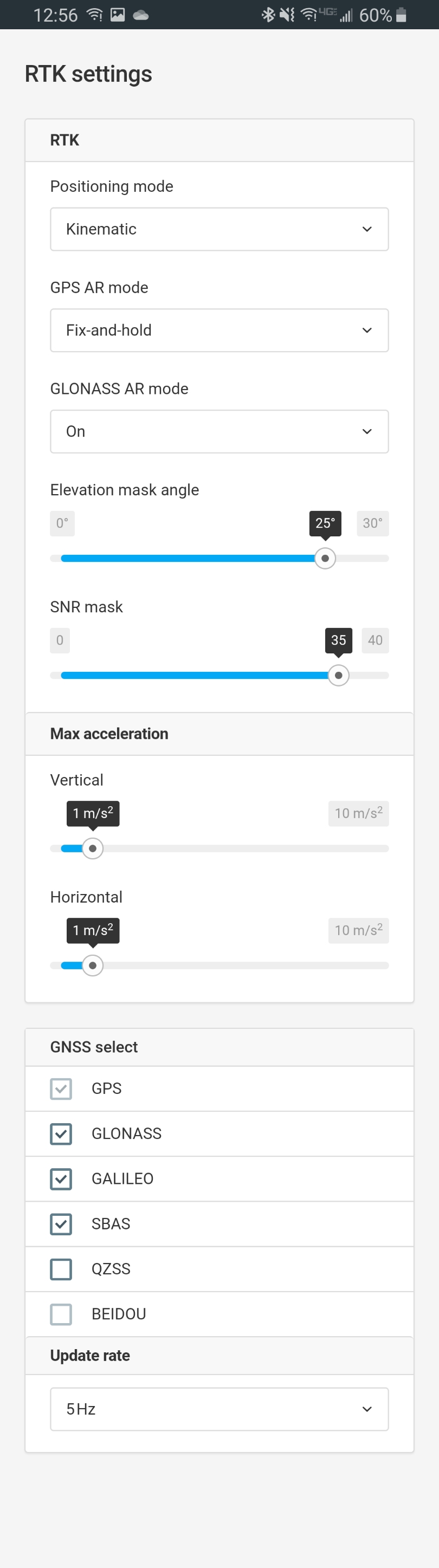
So I’ve been trying to get a pair of RS+ units to work together and for the rover to get a FIX solution, but I have had no such success for anything longer than a .5 second. I have read through the Quickstart Guide multiple times and searched this forum many times, trying new things each time but to no avail. I have attached screenshots of the ReachView App settings for both the rover and the base. My AR rarely spikes above the 2.7 threshold for the Fix Solution and it never stays longer than a second or so.
Your elevation mask angle is too tight, set back to 15 deg. your clipping the amount of sats needed. The more the better. That goes for sat. constellations also in your region.
Do you have clear sky view? Or lots of tall buildings and trees etc? Next to high voltage lines or high electromagnetic interference such as welding machines or alien space ships?
Set base update rate to 1Hz, the rover to 5Hz.
For testing, use about 2 min instead of 30 min for base mode average single. You shouldn’t need that long anyways. If you need longer, deal with later after u gets things tweeked. Or better yet, set on a known point if you can after for better precision.
It is a reasonably clear view of the sky. I on a couple large grassy fields in the middle of a college campus. I set it back to 15 for both rover and base.
This was during one of the point collections, but the current location is in the middle between the camera location and the tripod about center image in the distance.
So I went back out there after reading your post and it said it had a fix with 999.9 AR, but as soon as I walked 3m away, without moving the rover, the AR dropped back down to 1.0 and didnt recover. I told it to reaccumulate data for the base and I’ll let you know if maybe that fixes it.
See your in VA. You have the correct sat constellations selected. Good.
Keep in mind, depending on time and region, your can swap the GLONASS for BEIDOU to see if you get a better fix, more sats etc. But stick with GLONASS for now for testing.
Download, very very useful. Just make sure you set up correct time zone , region etc. L1 band selection:
Fyi, best to set BASE up in the best spot for maximum clear sky view…and high as possible, but stick with what you have for now. I.e
Not next to a tree or building.
When you collect/stake points with rover, its inevitable you’ll go from fix to float… but depends… that’s where the RS2 shines.
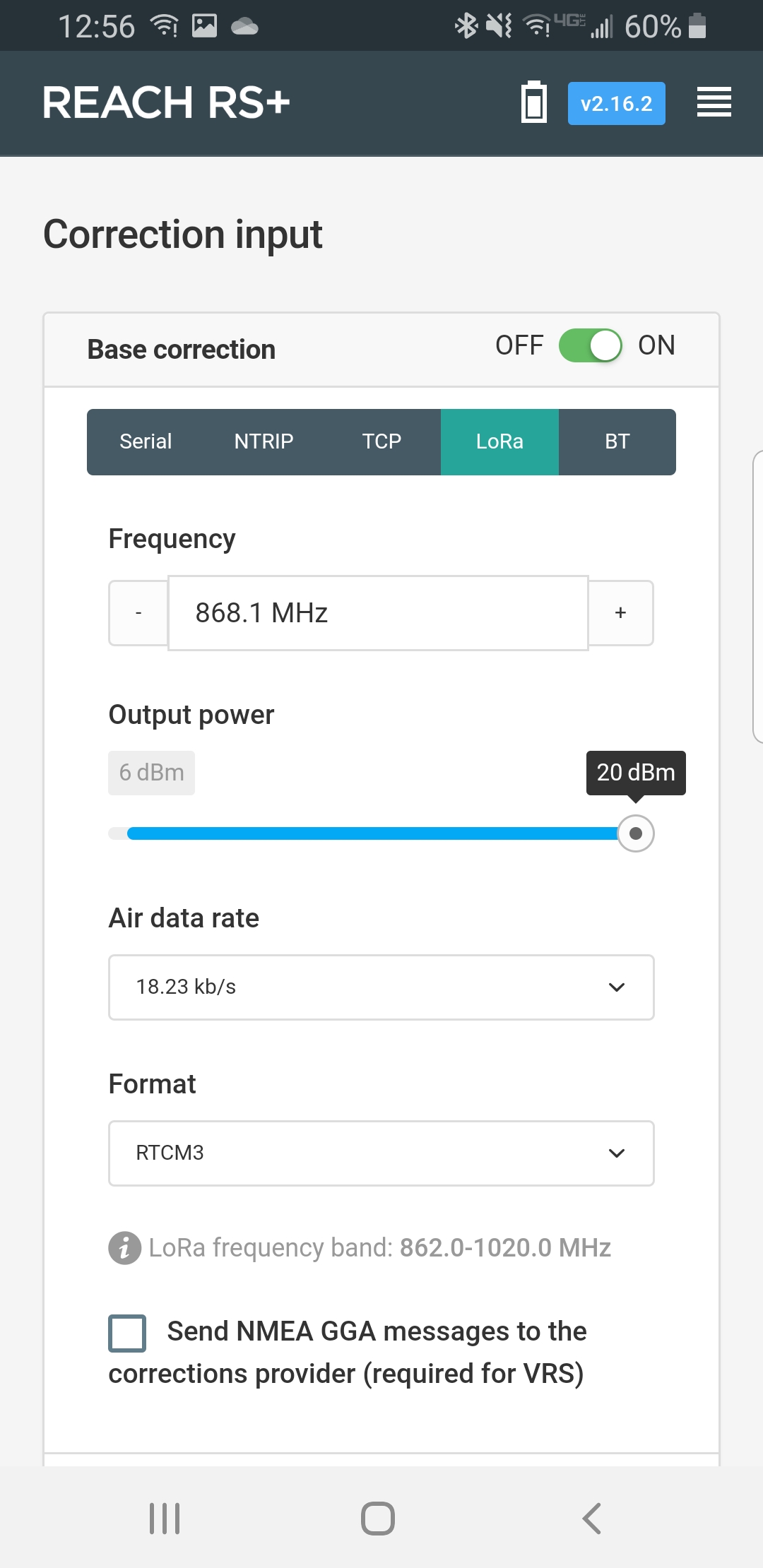
So I gave it about an hour to collect info and it wasn’t getting anywhere close to a Fix Solution. I’m gonna do some more testing with switching between BEIDOU and GLONASS, but overall, it’s not looking to good. Should I change the air rate of the the LoRa as well to 9.11kb/s?
Stick with the defaults for now with LoRa which is 9.11 kb/s. But the 18.23 kb/s should be just fine anyways, it’s what I use all the time, but I am not using long baselines. Lowering it to default may help if you have long baseline?
You usually need to adjust that when the base line starts to get really far… lower data rate for longer distances.
Roughly how far apart are the base and rover (baseline)?
make sure you start with the minimal amount (and low freq rates) of RTCM3 messages also. (too many overloads bandwidth) Then add as you go. Can do the same with the sat constellations also. i.e. start with GPS only, then add GLONASS etc.
Another good tip when things should be working and aren’t and numerous settings have been changed - just go into the settings (gear icon) and click to reset settings to default on both base and rover. Then start over.
In good sky view like the field above and with short baseline the fix should come in quickly.
I have uploaded the Rover Logs and the Base Logs through WeTransfer. I included both the log from before the restart and after. The baselines have generally been between 30 and 50m.
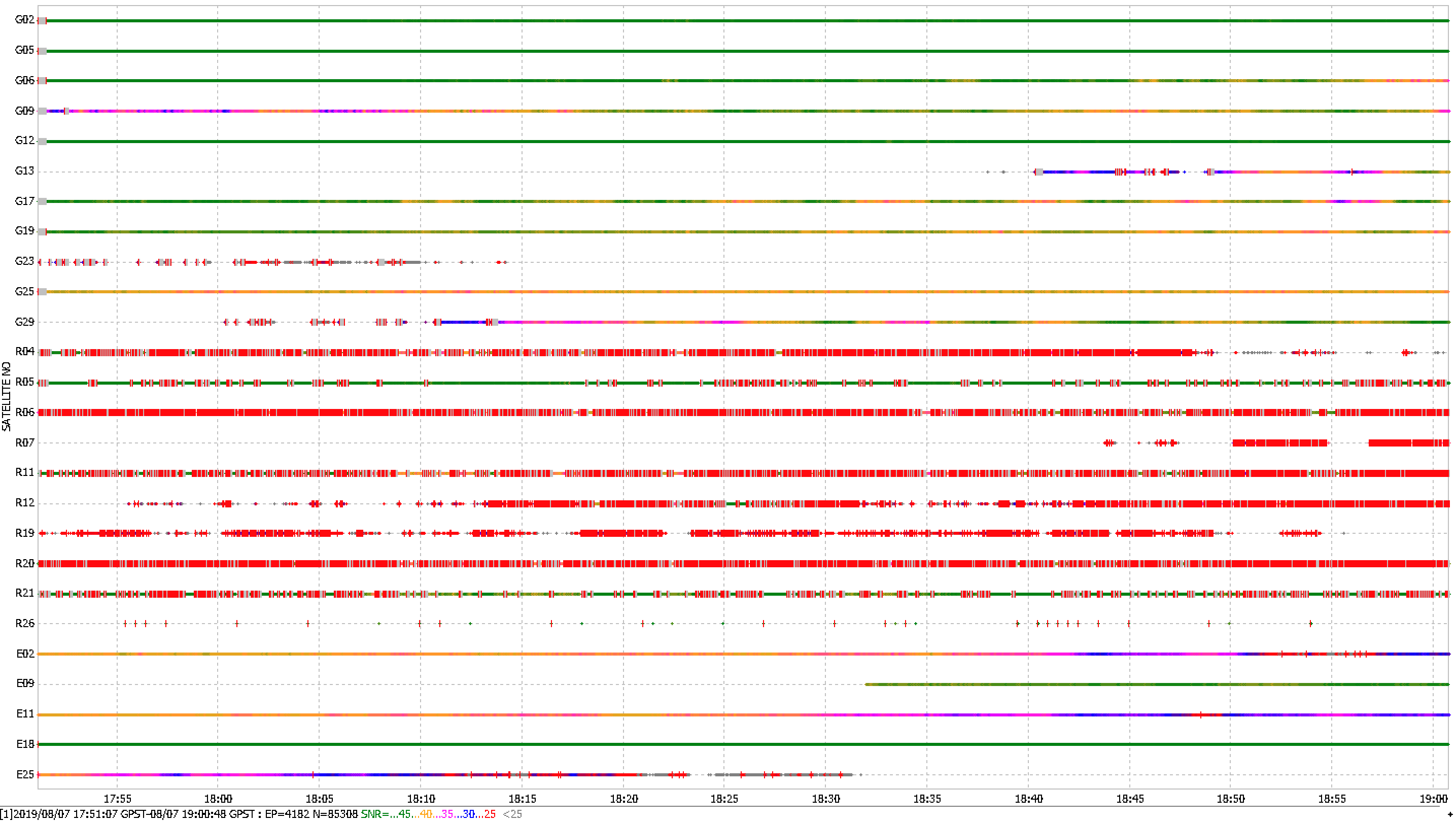
On the attached image is displayed observation data from your base. There are a lot of cycle slips (red marks) on GLONASS satellites. Cycle slips appear at the moment when the signal is delayed or disrupted and Reach losses track of the satellite. I’d recommend using BEIDOU instead of GLONASS.
So what caused the problem? Was it the alien spaceship hovering nearby? What was your solution? Use BEIDOU as suggested instead of GLONASS for that area/time?







 What was your solution? Use BEIDOU as suggested instead of GLONASS for that area/time?
What was your solution? Use BEIDOU as suggested instead of GLONASS for that area/time?