Hello!
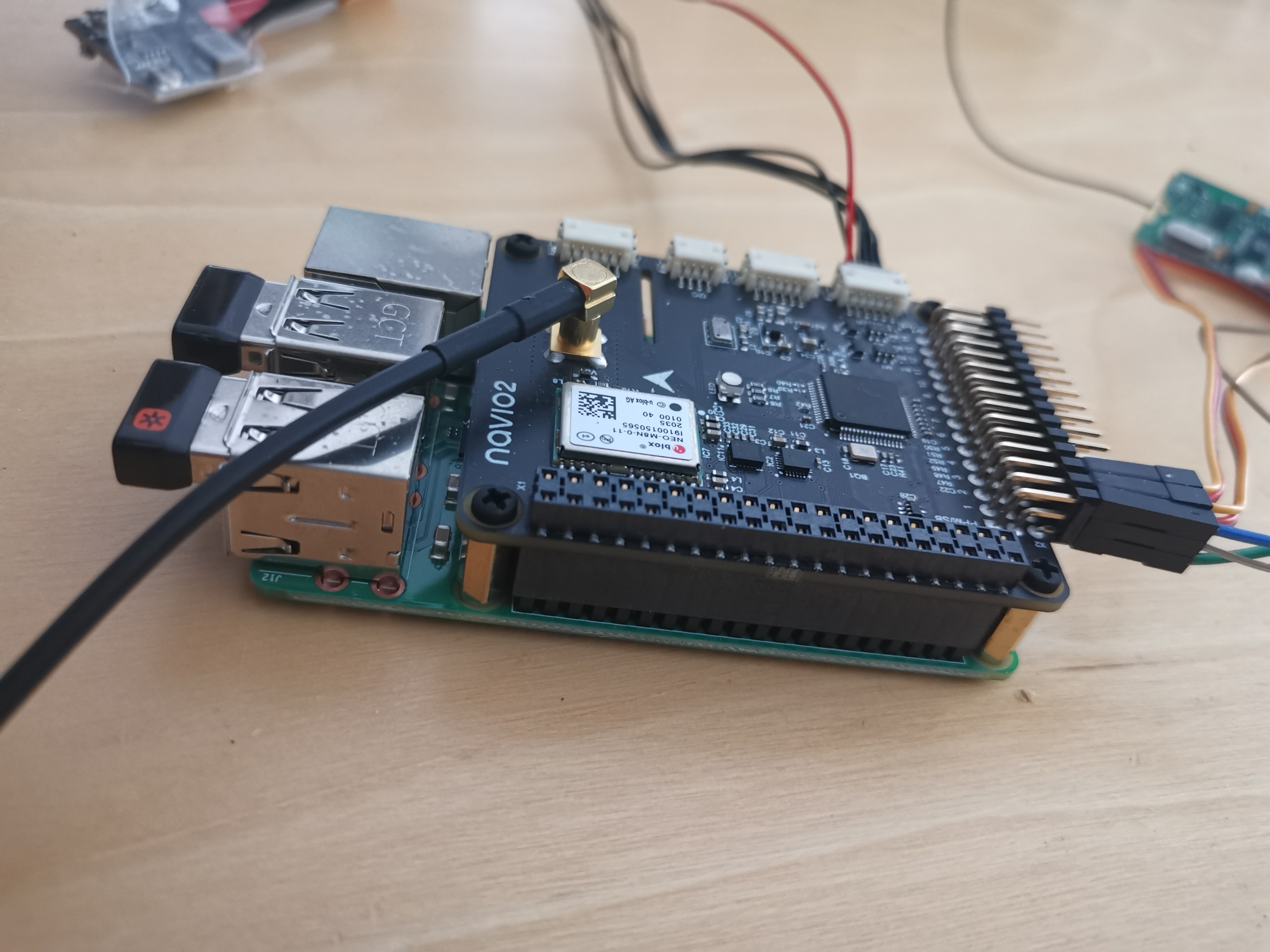
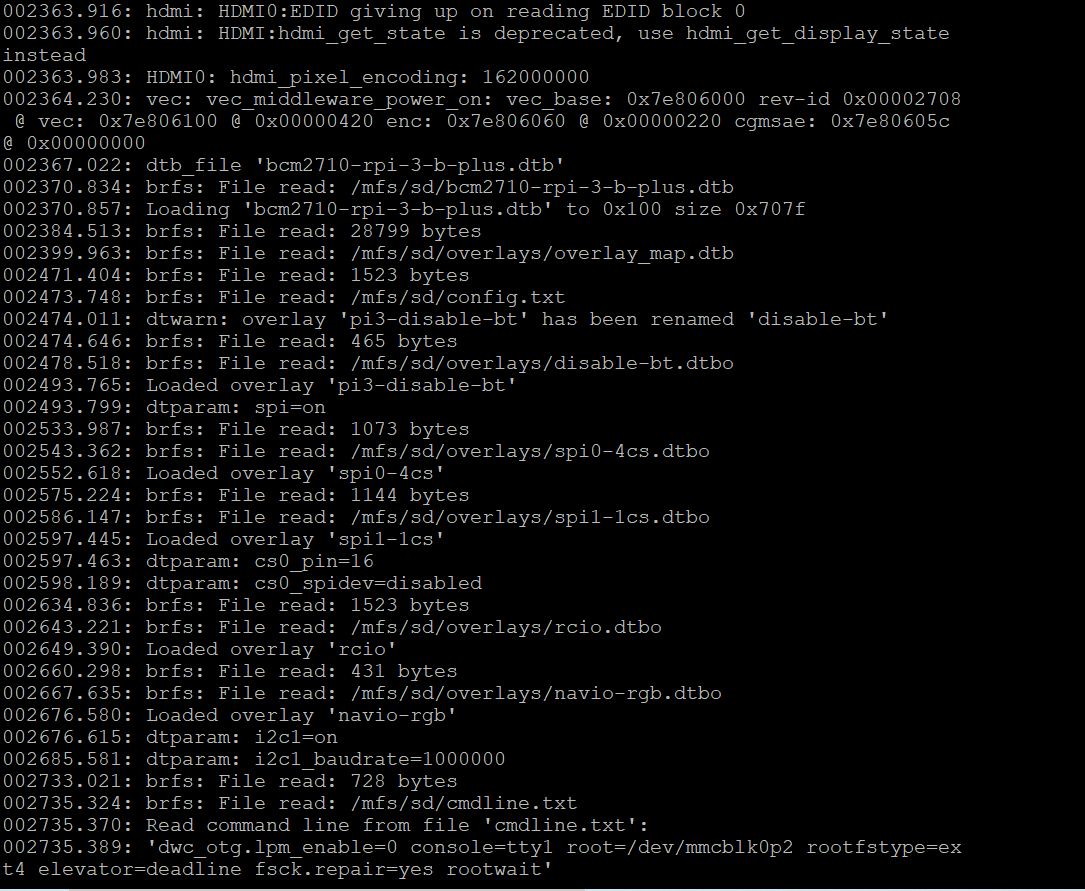
I am using Navio2 and raspberry pi4 model B. I am using the version “emlid-raspbian-20200922.img.xz” and I flashed it on SDHC 32GB card. I flashed it two times one with balenaEtcher and one with Rufus and it is showing same results for both.
Navio2 and raspberry pi are well connected and screwed according to the documentation.
I have also telemetry radio which is connected to my Windows and it success all the time to connect to Mission planer and it is showing good results regarding GPS and IMUs.
Problems:
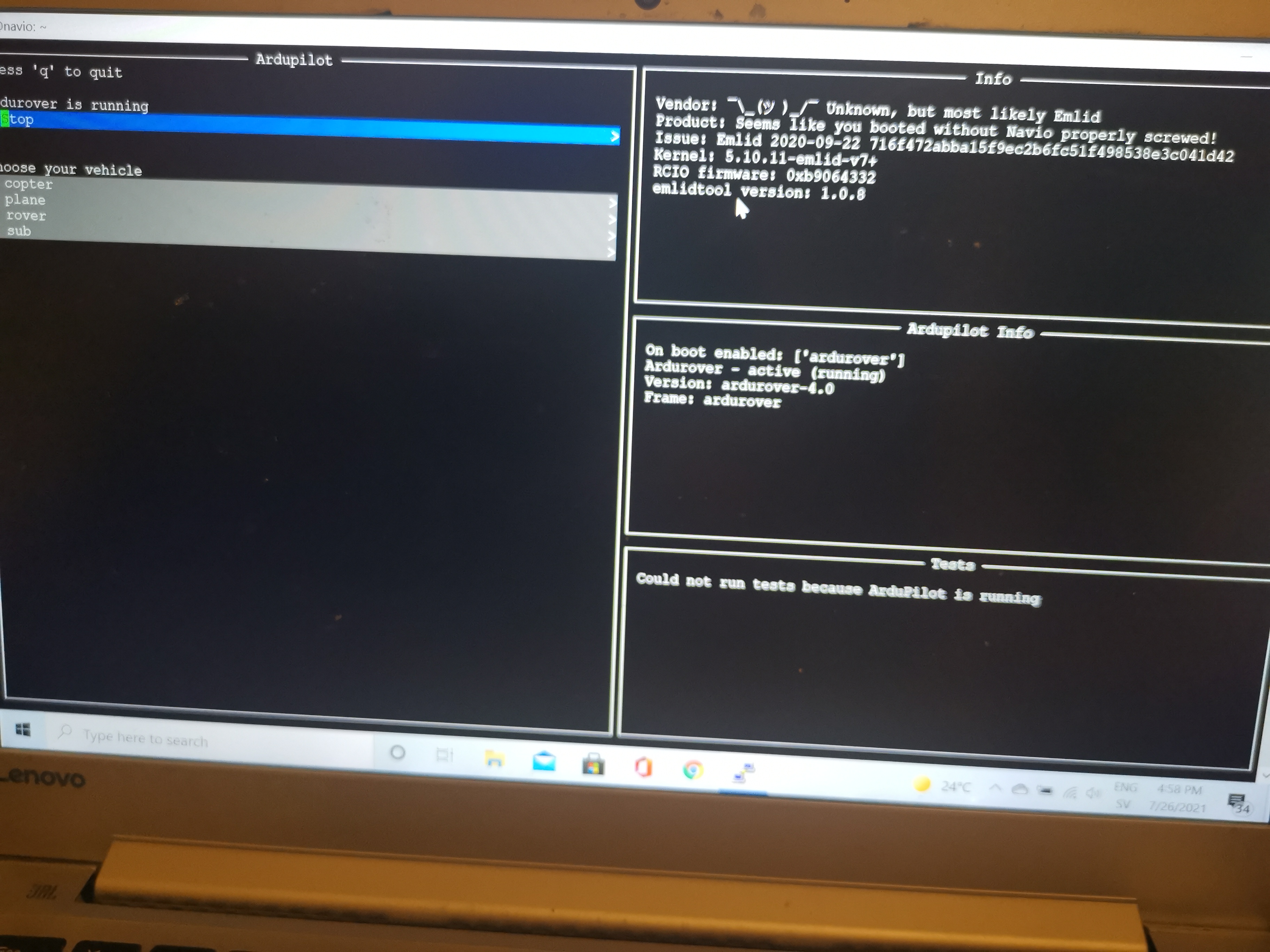
- sudo emlidtool ardupilot : still saying “Seems like you booted without Navio properly screwed”.
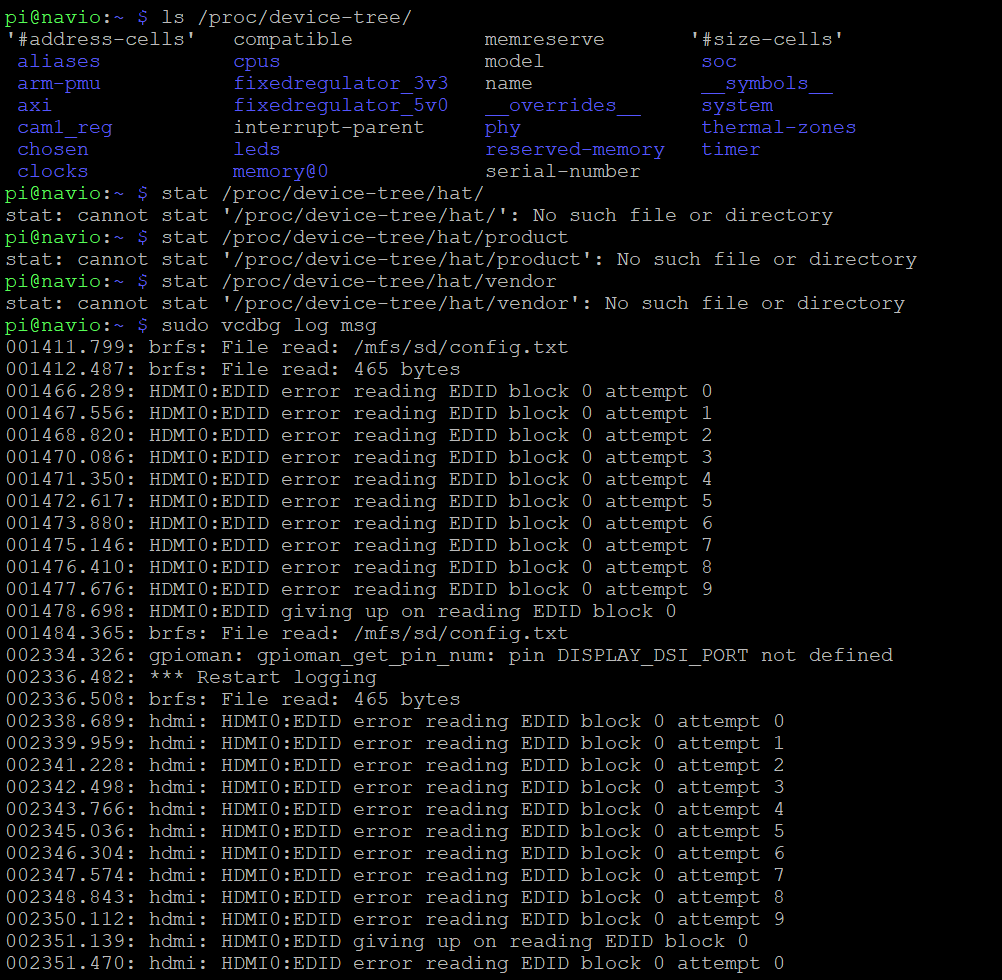
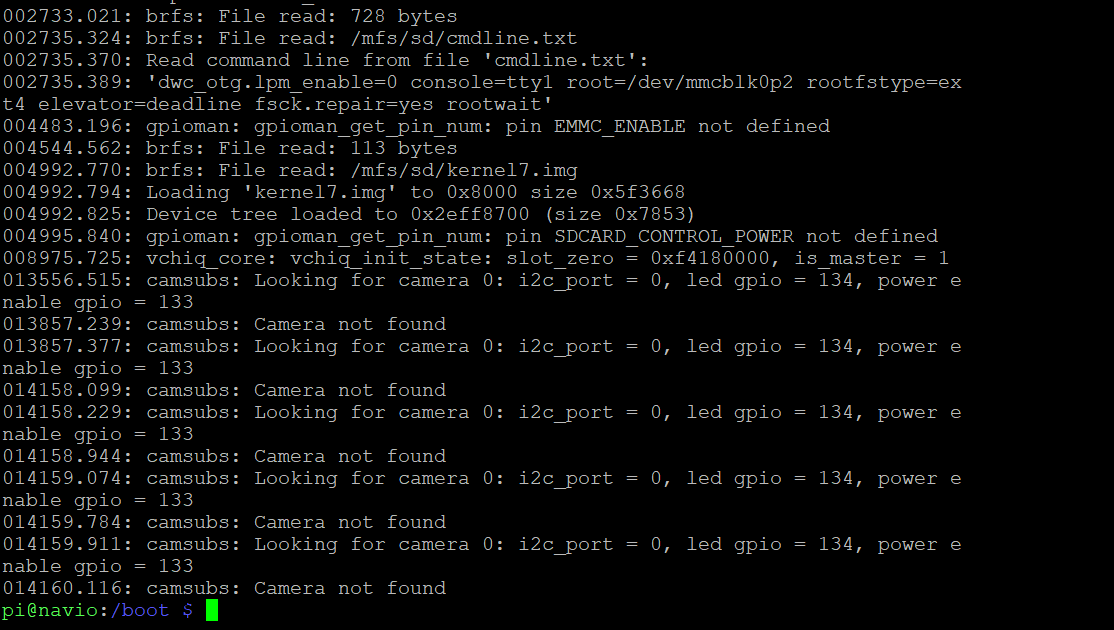
- cat /sys/kernel/rcio/status/alive: 1
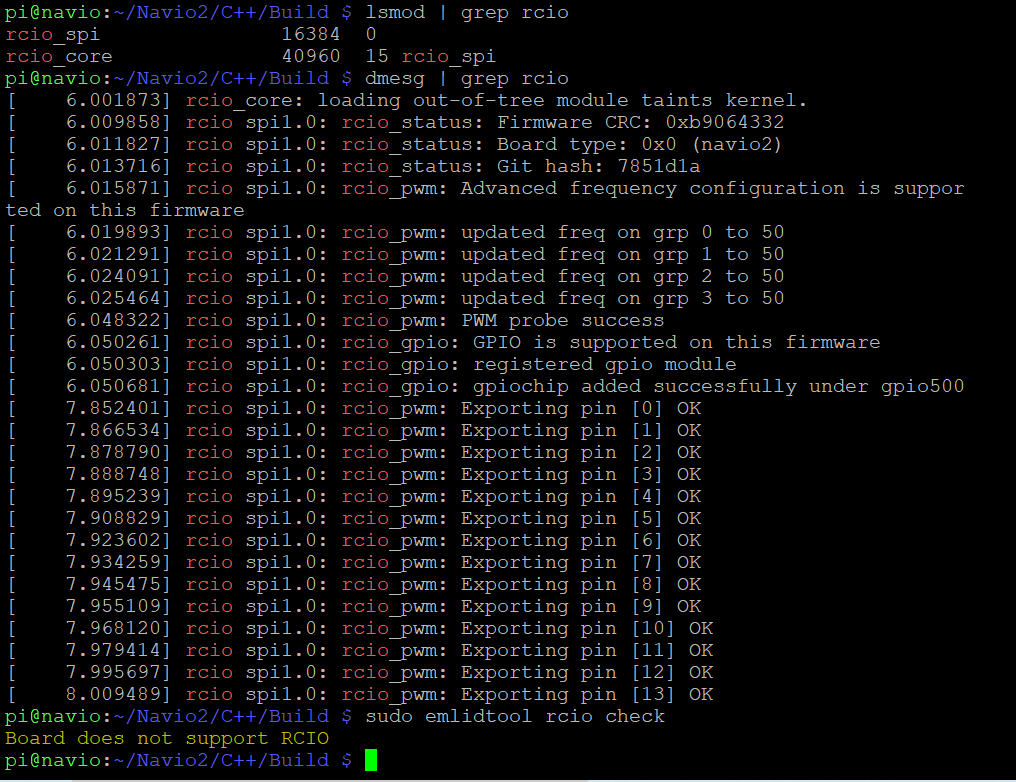
- sudo emlidtool rcio check OR emlidtool rcio check: Board does not support RCIO
- sudo emlidtool rcio update: Board does not support RCIO
- sudo emlidtool rcio update -f
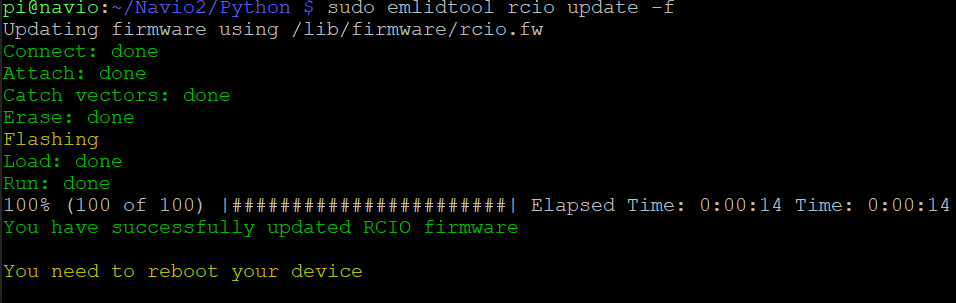
**After rebooting and doing again the same thing will produce exactly the same thing. So no improvements.
-
Trying C++ examples:
-
Executed all tests, (as sudo if required):
- AccelGyroMag : Output looks reasonable
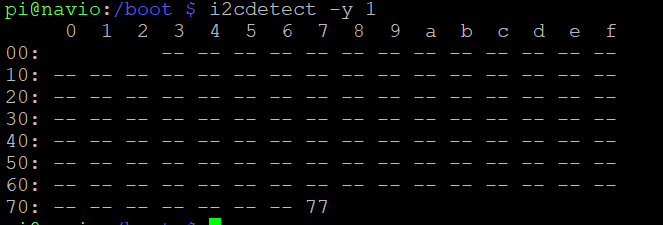
- ADC : “Failed to write reg: Remote I/O error”
- AHRS : Output looks reasonable
- Barometer : Output looks reasonable
- GPS : looks reasonable.
- *LED : Remote I/O error (and LED is not changing the color)
- RCInput : Shows zeros all the time regardless playing with the RC transmitter or not.
-
Servo : Remote I/O error
Maybe worthwile noticing: The I/O error messages changes between:
Failed to write device(-1): Remote I/O errorandFailed to write reg: Remote I/O error.
-
Python examples (after installing the requirements):
- AccelGyroMag : Output looks reasonable for both sensors
- Barometer : Output looks reasonable
- LED : Output looks reasonable, LED lights accordingly
- Servo : Showing nothing (like an open loop)
- ADC : Output looks reasonable
- GPS : Output looks reasonable
- RCInput : Shows zeros all the time regardless playing with the RC transmitter or not.
It is so similar problem to: RPi3 B can't connect to Navio2 - #6 by Fabian
Hope someone can help with the that.