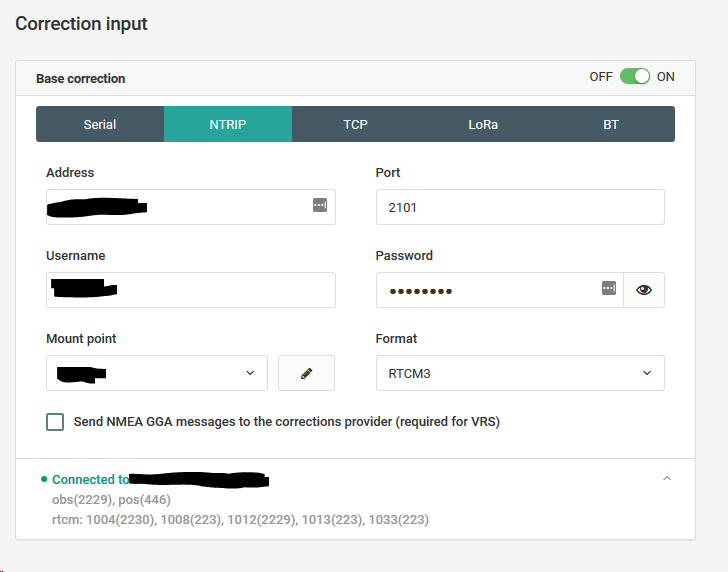
My Emlid Reach RS+ stays on single solution status even when receiving corrections via NTRIP. I tested it when having a clear view of the sky for at least 30 min, and it stays on single. However, if I connect it to a different mount point (almost 800 km away), the solution status changes to float immediately, so I suspect some kind of problem with the base station I am using (the one nearest to me). Other mount points near me also are not working. Here is some information on my setup :
- Reachview version : 2.16.2
- [details=“Simple system report”]
app version: 2.16.2-r0
'wifi_status, interface: wlan0':
- wifi_mode: infrastructure
- ip: 192.168.2.22
is_added: true
is_connected: true
is_visible: false
mac_address: 28:ED:E0:D6:43:79
security: wpa-psk
ssid: dlink
uuid: 8a141773-b812-46a5-9b45-ddc44b1c5129
base mode:
base coordinates:
accumulation: '2'
antenna offset:
east: '0'
north: '0'
up: '0'
coordinates:
- '0'
- '0'
- '0'
format: llh
mode: single-and-hold
output:
enabled: false
format: rtcm3
path: tcpsvr://:9000#rtcm3
type: tcpsvr
rtcm3 messages:
'1002':
enabled: true
frequency: '1'
'1006':
enabled: true
frequency: '0.1'
'1010':
enabled: true
frequency: '1'
'1097':
enabled: false
frequency: '1'
'1107':
enabled: false
frequency: '1'
'1117':
enabled: false
frequency: '1'
'1127':
enabled: false
frequency: '1'
bluetooth:
discoverable: false
enabled: false
pin: '***'
correction input:
input2:
enabled: true
format: rtcm3
path: (removed for privacy reasons)
send position to base: 'off'
type: ntripcli
input3:
enabled: false
format: rtcm3
path: :9028
type: tcpsvr
logging:
base:
format: RINEX
started: true
version: '3.03'
correction:
format: RTCM3
started: true
version: null
interval: 24
overwrite: true
raw:
format: RINEX
started: true
version: '3.03'
solution:
format: LLH
started: true
version: null
lora:
air rate: 2.6000000000000001
frequency: 868000
output power: 20
position output:
output1:
enabled: false
format: nmea
path: bluetooth
type: bluetooth
output2:
enabled: false
format: llh
path: :9001
type: tcpsvr
output3:
enabled: true
format: llh
path: :2014
type: tcpsvr
output4:
enabled: true
format: llh_ext
path: :2015
type: tcpsvr
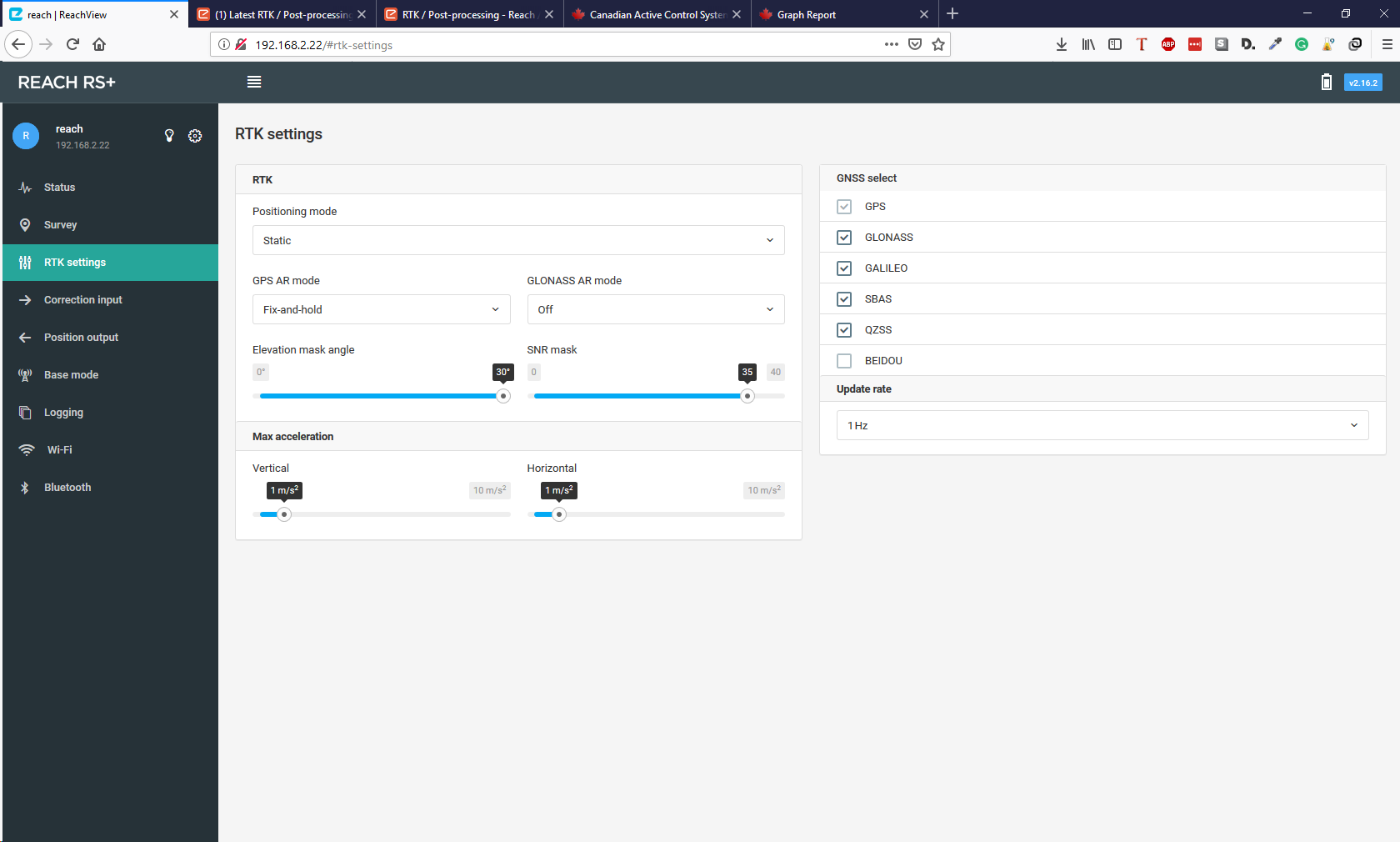
rtk settings:
elevation mask angle: '30'
glonass ar mode: 'off'
gps ar mode: fix-and-hold
max horizontal acceleration: '1'
max vertical acceleration: '1'
positioning mode: static
positioning systems:
compass: false
galileo: true
glonass: true
gps: true
qzs: true
qzss: true
sbas: true
snr mask: '35'
update rate: '1'
[/details]
RTK settings :
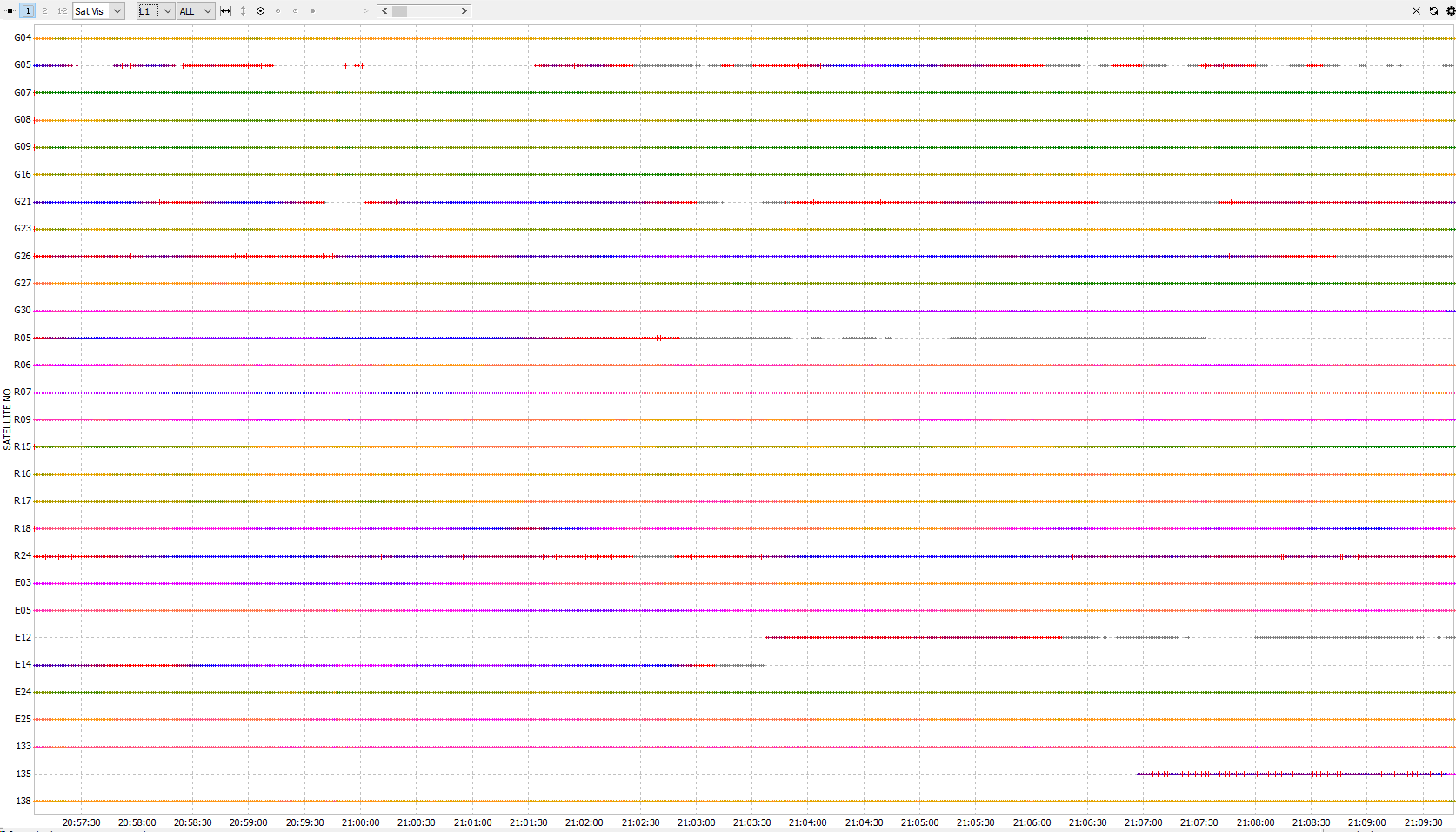
RTKPlot of rover data :
RTKPlot of base data :
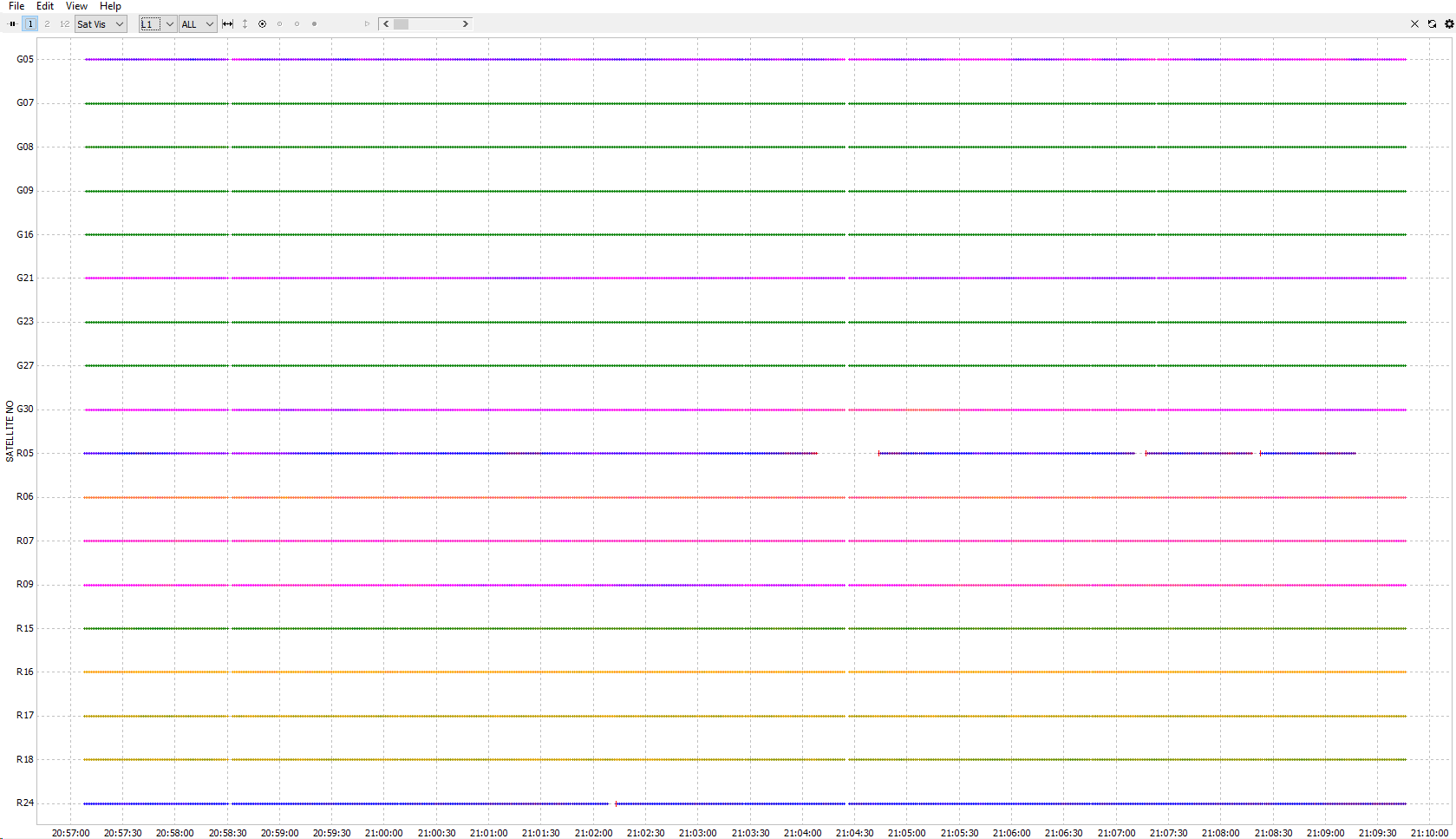
I will not include the RINEX data due to privacy reasons. While I am aware of the SNR of the data is not that great (there were no better locations right now), the mount point from 800 km away still is able to provide a fix, so I am sure the SNR is not the problem.