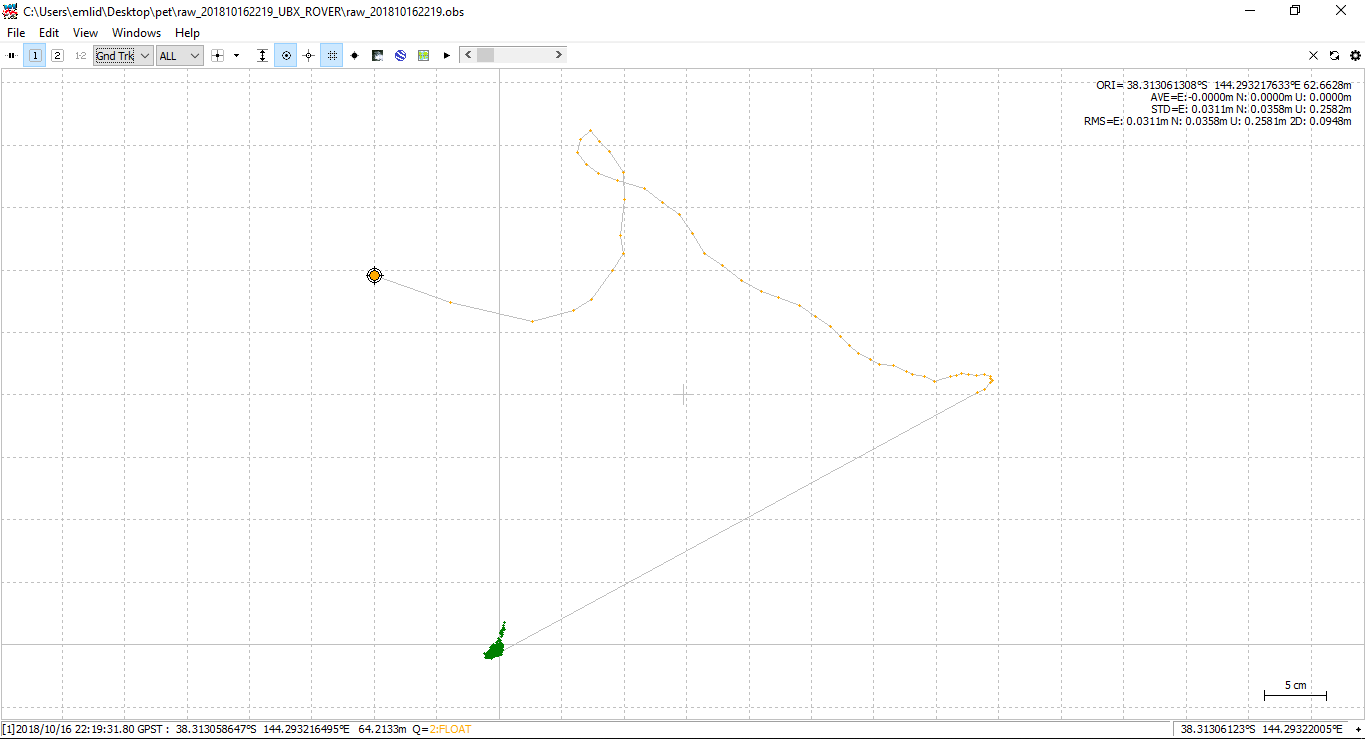
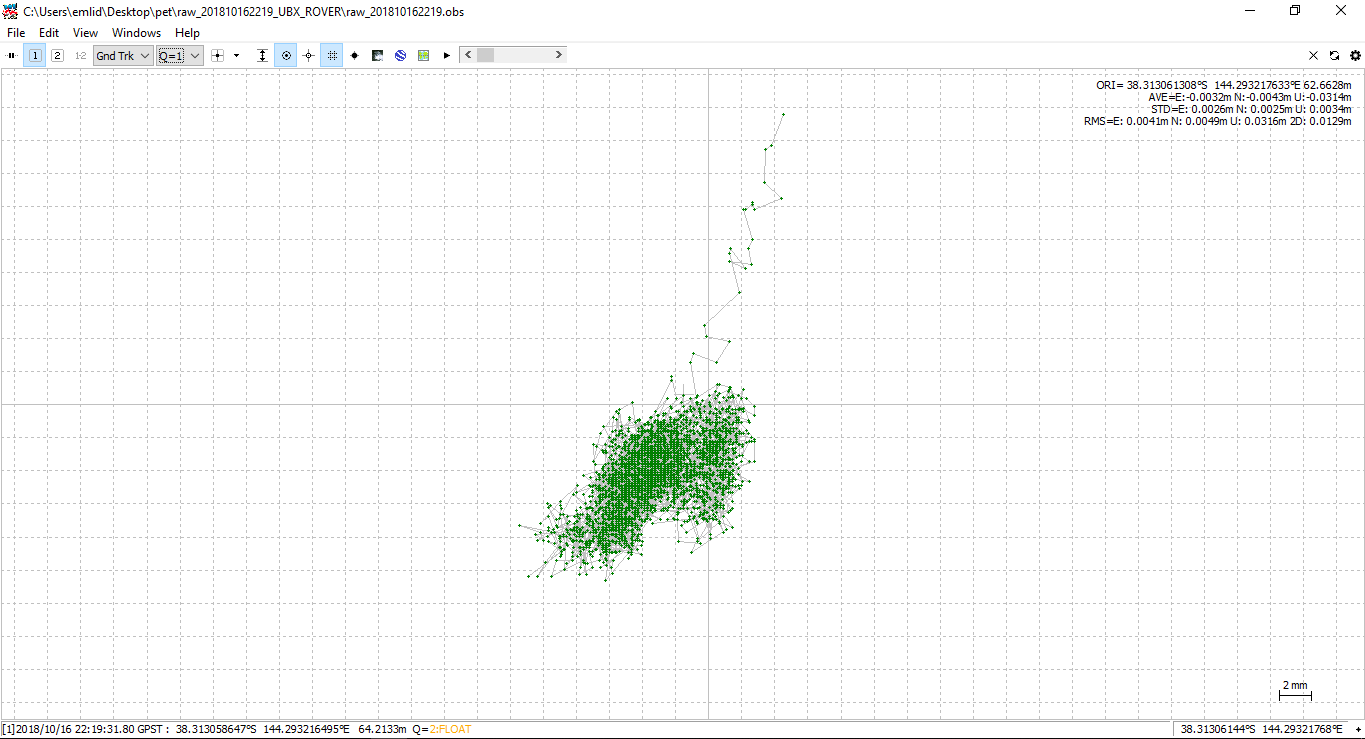
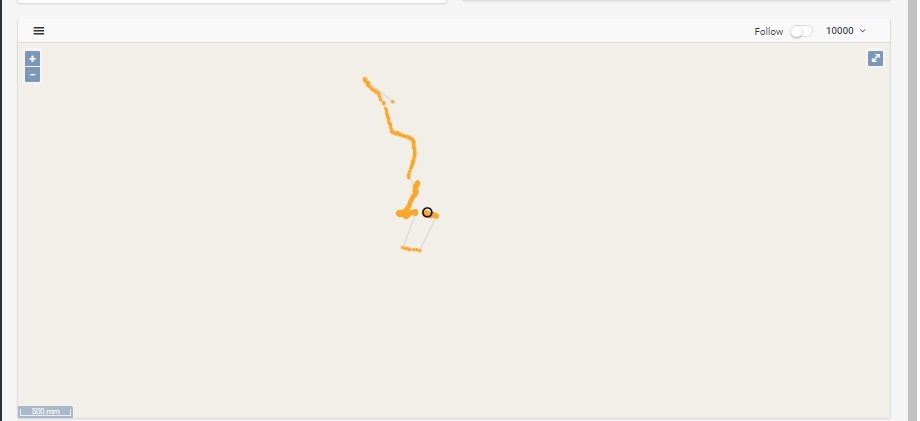
Hi, we are using a fixed BASE and each morning I place our Reach ROVER into a calibration position. For the past 20 days it has always come up in the same spot. But this morning the ROVER position will not stay put and continues to randomly creep around. This renders the system unusable. Only after waiting for approx 3 hours has the ROVER position stabilized enough that we can use the system again.
Our installation requires that the BASE and ROVER remain powered up and linked (via LoRa) all the time, which has so far been working fine. Both BASE and ROVER are using v2.14.0.
Any idea as to what could cause this instability? And is there a quick way to recover from it (we really cannot afford to be down for 3 hours)?
Any suggestions would be appreciated.
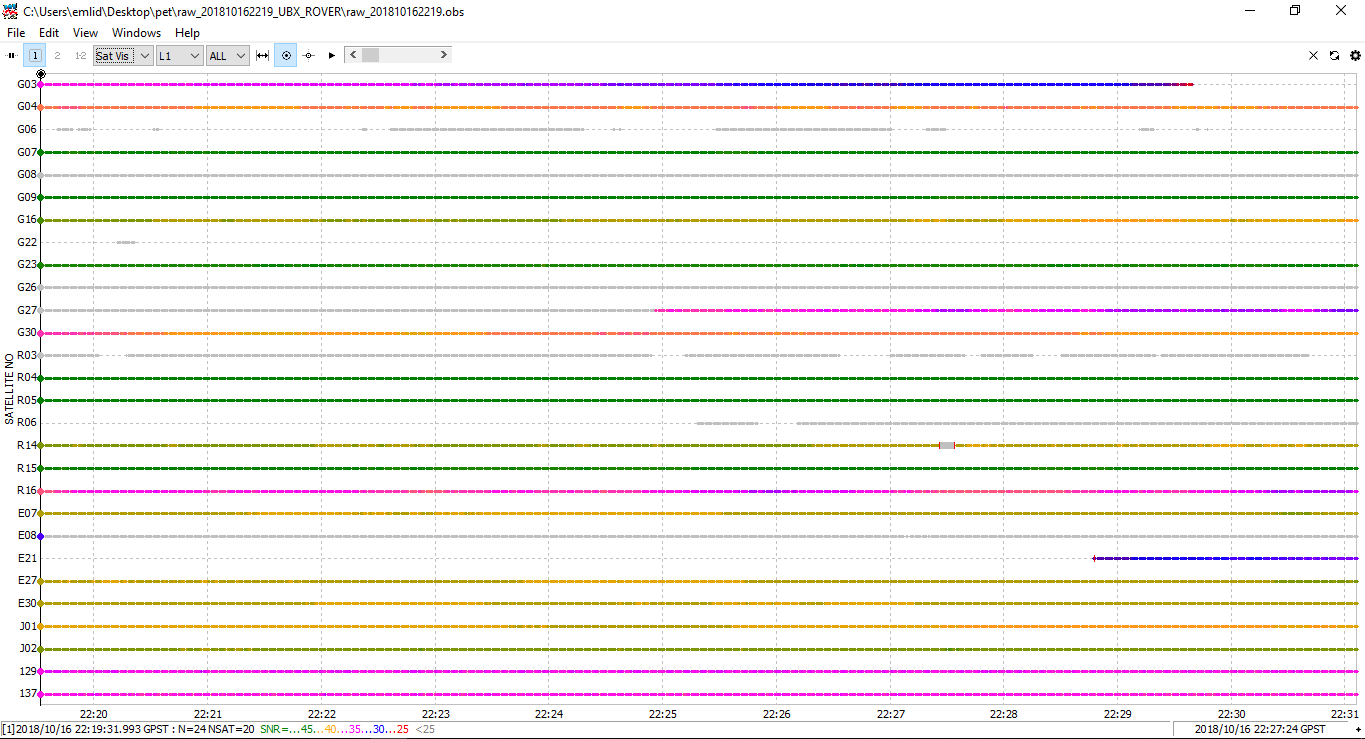
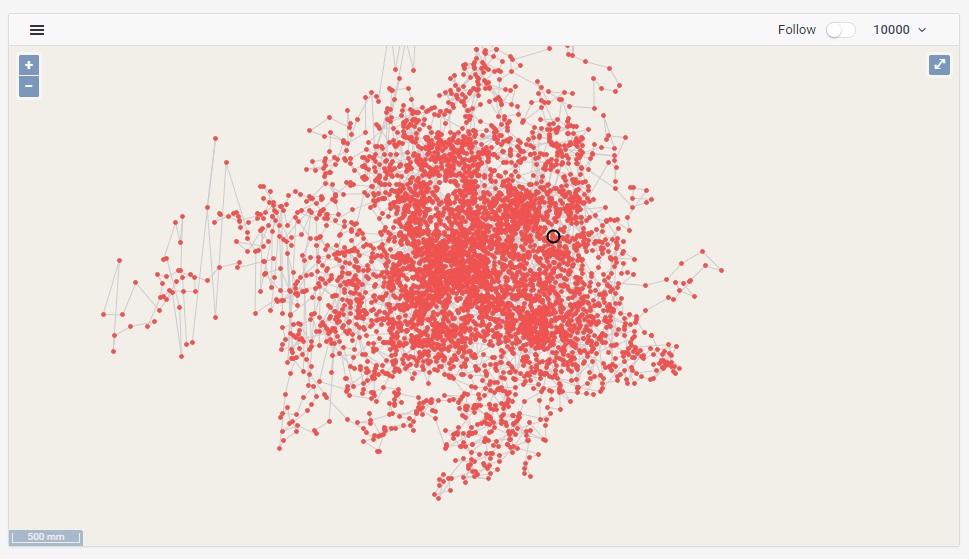
Attached is a status map from the ROVER…

And from the BASE.
As well as the system reports.
ROVER report…
Simple system report
app version: 2.14.0-r0
'wifi_status, interface: wlan0':
- wifi_mode: wpa_supplicant
- ip: 10.1.1.10
is_connected: true
mac_address: fc:db:b3:8d:c5:8b
ssid: TheKnightFamily
base mode:
base coordinates:
accumulation: '6.1'
antenna offset:
east: '0'
north: '0'
up: '1'
coordinates:
- '-38.315113'
- '144.318144'
- '43.116'
format: llh
mode: manual
output:
enabled: false
format: rtcm3
path: ntrips://:BETATEST@69.75.31.235:2101/AUGSS14#rtcm3
type: ntrips
rtcm3 messages:
'1002':
enabled: true
frequency: '1'
'1006':
enabled: true
frequency: '0.1'
'1008':
enabled: true
frequency: '1'
'1010':
enabled: true
frequency: '1'
'1019':
enabled: true
frequency: '1'
'1020':
enabled: true
frequency: '1'
'1097':
enabled: true
frequency: '1'
'1107':
enabled: true
frequency: '1'
'1117':
enabled: false
frequency: '1'
'1127':
enabled: false
frequency: '1'
gps:
enabled: false
frequency: '1'
qzss:
enabled: false
frequency: '1'
bluetooth:
discoverable: false
enabled: true
pin: '***'
correction input:
input2:
enabled: true
format: rtcm3
path: lora
send position to base: 'off'
type: lora
input3:
enabled: false
format: rtcm3
path: 10.1.1.248:9028
type: tcpcli
logging:
base:
format: RTCM3
started: false
version: null
correction:
format: RTCM3
started: false
version: null
interval: 24
overwrite: true
raw:
format: UBX
started: false
version: null
solution:
format: NMEA
started: false
version: null
lora:
air rate: '18.23'
frequency: 919000
output power: '20'
position output:
output1:
enabled: true
format: nmea
path: ttyMFD2:9600:8:n:1:off
type: serial
output2:
enabled: false
format: nmea
path: :2013
type: tcpsvr
output3:
enabled: true
format: llh
path: :2014
type: tcpsvr
output4:
enabled: true
format: llh
path: :2015
type: tcpsvr
rtk settings:
elevation mask angle: '12'
glonass ar mode: 'on'
gps ar mode: fix-and-hold
max horizontal acceleration: '1'
max vertical acceleration: '1'
positioning mode: kinematic
positioning systems:
compass: false
galileo: true
glonass: true
gps: true
qzs: true
qzss: true
sbas: true
snr mask: '34'
update rate: '5'
BASE report…
Simple system report
app version: 2.14.0-r0
'wifi_status, interface: wlan0':
- wifi_mode: wpa_supplicant
- ip: 10.1.1.11
is_connected: true
mac_address: fc:db:b3:9a:d9:95
ssid: TheKnightFamily
base mode:
base coordinates:
accumulation: '30'
antenna offset:
east: '0'
north: '0'
up: '0'
coordinates:
- '-38.3131540332'
- '144.2932981507'
- '69.516'
format: llh
mode: manual
output:
enabled: true
format: rtcm3
path: lora
type: lora
rtcm3 messages:
'1002':
enabled: true
frequency: '1'
'1006':
enabled: true
frequency: '0.1'
'1008':
enabled: false
frequency: '1'
'1010':
enabled: true
frequency: '1'
'1019':
enabled: false
frequency: '1'
'1020':
enabled: true
frequency: '1'
'1097':
enabled: true
frequency: '1'
'1107':
enabled: true
frequency: '1'
'1117':
enabled: false
frequency: '1'
'1127':
enabled: false
frequency: '1'
gps:
enabled: false
frequency: '1'
qzss:
enabled: false
frequency: '1'
bluetooth:
discoverable: false
enabled: false
pin: '***'
correction input:
input2:
enabled: false
format: rtcm3
path: lora
send position to base: 'off'
type: lora
input3:
enabled: false
format: rtcm3
path: :9028
type: tcpsvr
logging:
base:
format: RTCM3
started: false
version: null
correction:
format: RTCM3
started: false
version: null
interval: 24
overwrite: true
raw:
format: UBX
started: false
version: null
solution:
format: NMEA
started: false
version: null
lora:
air rate: '18.23'
frequency: 919000
output power: '20'
position output:
output1:
enabled: false
format: nmea
path: bluetooth
type: bluetooth
output2:
enabled: false
format: nmea
path: :2013
type: tcpsvr
output3:
enabled: true
format: llh
path: :2014
type: tcpsvr
output4:
enabled: true
format: llh
path: :2015
type: tcpsvr
rtk settings:
elevation mask angle: '10'
glonass ar mode: 'on'
gps ar mode: fix-and-hold
max horizontal acceleration: '1'
max vertical acceleration: '1'
positioning mode: kinematic
positioning systems:
compass: false
galileo: true
glonass: true
gps: true
qzs: true
qzss: true
sbas: true
snr mask: '30'
update rate: '5'