



Hallo everyone
First of all thanks to the emlid team to provide a system with this capabilities for a price range accessible to a lot of people (including me ![]() ).
).
I am a total beginner on this field and probably the most of my questions are already answered in some way or another. The thing I want to do, and if desired to share, is producing a 3D model of a 30ha area I an alpine region with total elevation difference of 120m. If it is desired a little work report out of it I describe it better.
To get me started I need a basic issue solved:
My rover does not measure its actual position but it gives me the position of the base station
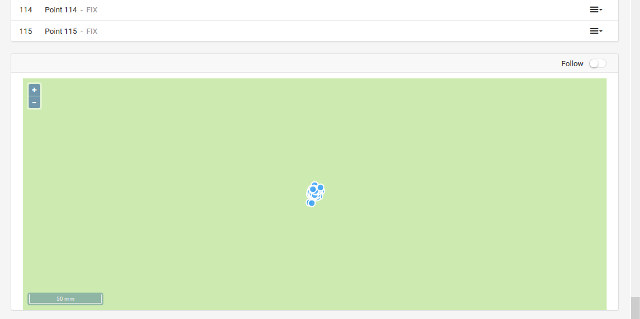
I measured 115 points all fix with an auto rule of 10 s data collection precision 0.01m and DOP =2
The problem is that I moved the rover in an approximately 6m grid on a 0.6 ha field and all points collapsed on the position of the base station within a 1 cm circle. I mean, I appreciate the precision but I have a slight feeling down my guts that I have set up something horribly wrong.
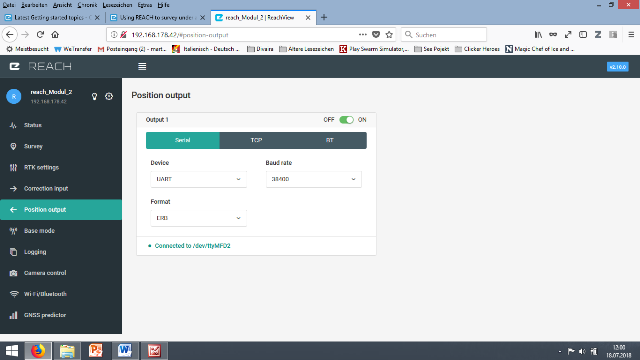
following my app settings and a system report
Summary
Simple system report
app version: 2.10.0-r0
'wifi_status, interface: wlan0':
- Client state
- IP address: 192.168.178.42
mac address: 90:b6:86:02:5f:d8
ssid: FRITZ!Box 7330
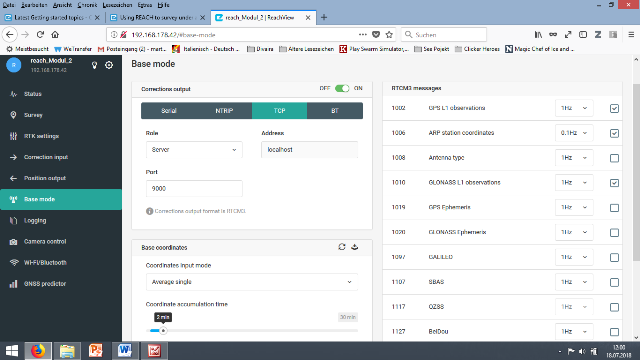
base mode:
base coordinates:
accumulation: '2'
antenna offset:
east: '0'
north: '0'
up: '0'
coordinates:
- '0'
- '0'
- '0'
format: llh
mode: single-and-hold
output:
enabled: true
format: rtcm3
path: tcpsvr://:9000#rtcm3
type: tcpsvr
rtcm3 messages:
'1002':
enabled: true
frequency: '1'
'1006':
enabled: true
frequency: '0.1'
'1008':
enabled: false
frequency: '1'
'1010':
enabled: true
frequency: '1'
'1019':
enabled: false
frequency: '1'
'1020':
enabled: false
frequency: '1'
'1097':
enabled: false
frequency: '1'
'1107':
enabled: false
frequency: '1'
'1117':
enabled: false
frequency: '1'
'1127':
enabled: false
frequency: '1'
bluetooth:
discoverable: false
enabled: false
pin: '***'
camera:
duty cycle: 20
enable: false
period: 2
polarity: true
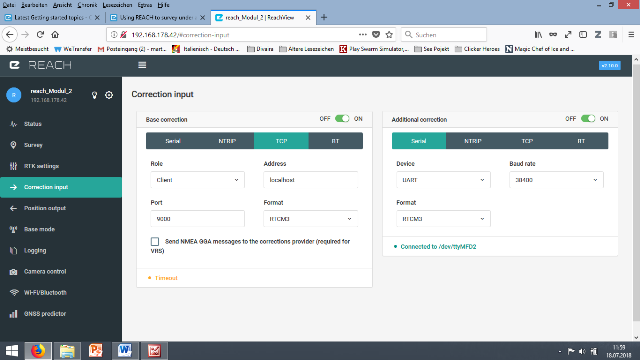
correction input:
input2:
enabled: true
format: rtcm3
path: localhost:9000
send position to base: 'off'
type: tcpcli
input3:
enabled: true
format: rtcm3
path: ttyMFD2:38400:8:n:1:off
type: serial
logging:
base:
format: RTCM3
started: true
version: null
correction:
format: RTCM3
started: true
version: null
interval: 24
overwrite: true
raw:
format: UBX
started: true
version: null
solution:
format: LLH
started: true
version: null
position output:
output1:
enabled: true
format: erb
path: ttyMFD2:38400:8:n:1:off
type: serial
output2:
enabled: true
format: llh
path: :2013
type: tcpsvr
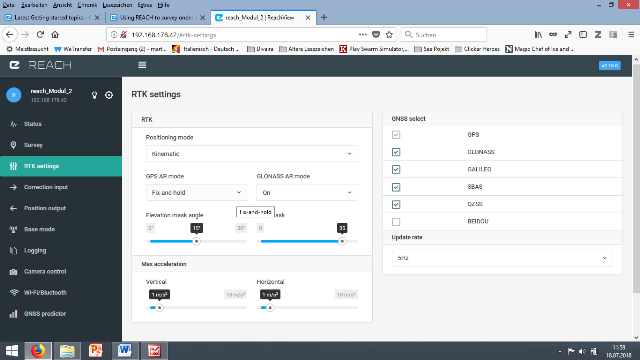
rtk settings:
elevation mask angle: '15'
glonass ar mode: 'on'
gps ar mode: fix-and-hold
max horizontal acceleration: '1'
max vertical acceleration: '1'
positioning mode: kinematic
positioning systems:
compass: false
galileo: true
glonass: true
gps: true
qzs: true
qzss: true
sbas: true
snr mask: '35'
update rate: '5'

 altought i saw 24 satelites, most of them with green bars an error bars besite it
altought i saw 24 satelites, most of them with green bars an error bars besite it
