I came here to ask for some help regarding my project in which i want to have a remote control from navio2 on my mobile application. I want to create a server application that runs on raspberry and gives commands to the drone using the python api, on sockets, preferably, which communicates with a client application (Flutter). Is there any support gived by navio board or it is equipped with such possibilty in order to achieve this. To be mention that the configuration is a Rasp PI4 B with Navio2. Any support in this direction or documentation will help me a lot.
The thing you want to accomplish sounds feasibly, however, I’m afraid, we don’t have a ready solution for that. Maybe someone from our users will share their experience in something similar.
You can take a look at Navio2 docs that might be of help to you.
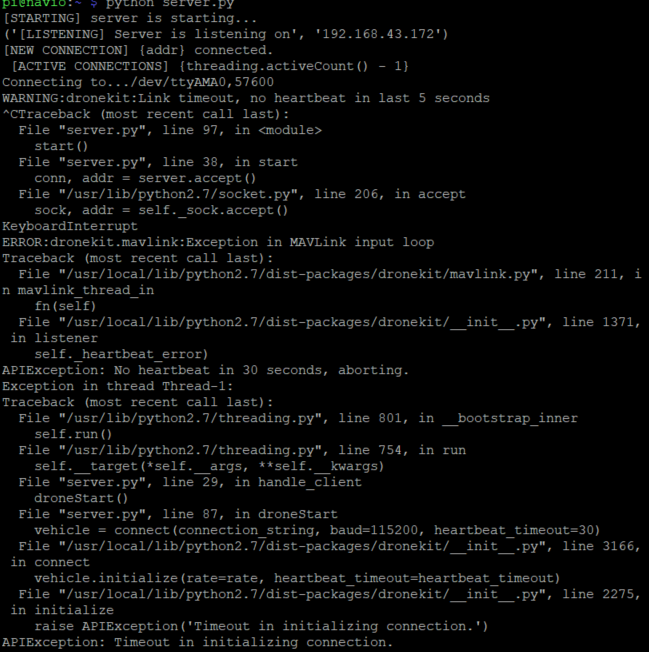
As far as i did 'til now, i achived to control my drone via sockets with my mobile application. There is always that error which is showing up and saying “No hearbeat in last 5 seconds”. To be mention that with mission planner no errors are throwed and despite this is working nice. Would we have another approach for this in order to bypass this error?
Please see the detailed steps which conduct to this error showing up:
I also tried some stuff like chaning the baudrate or string connection, despite all this the error is keep showing. The SD Card is orginally by Rasspery PI4 firmware.
Any ideas how can i overcome this or what should i try also to see if can work?
I’m afraid I hardly can be of much help in the questions regarding custom scripts. Do you try to run ArduPilot and your script at the same time? I guess it may cause some issues.