Hello,
I am encountering at strange issue with my quadcopter/Navio2.
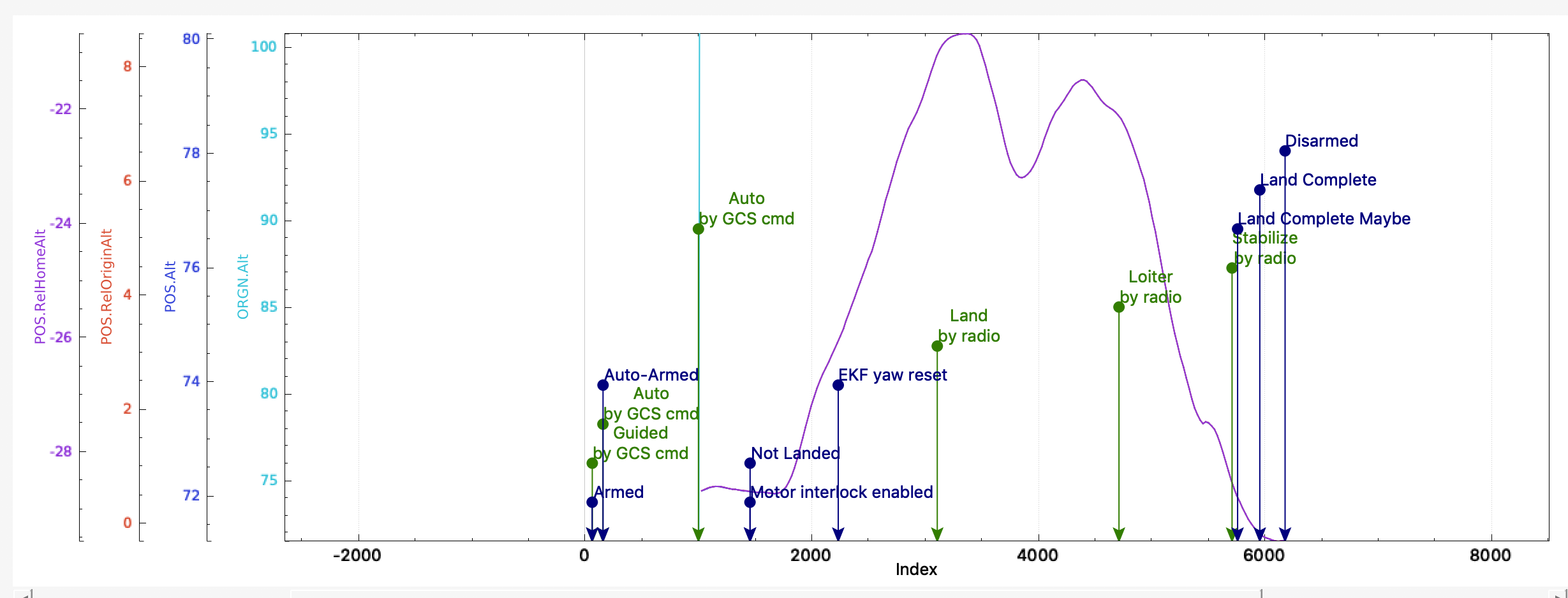
When armed the first time, the copter flies fine and all sensor values are sensible. But after landing and arming again, the relative to home altitude is set to a large negative value ( - 20-30m). This means that in second takeoff the copter will fly up very far when in reality the takeoff alt is set to only 2 meters.
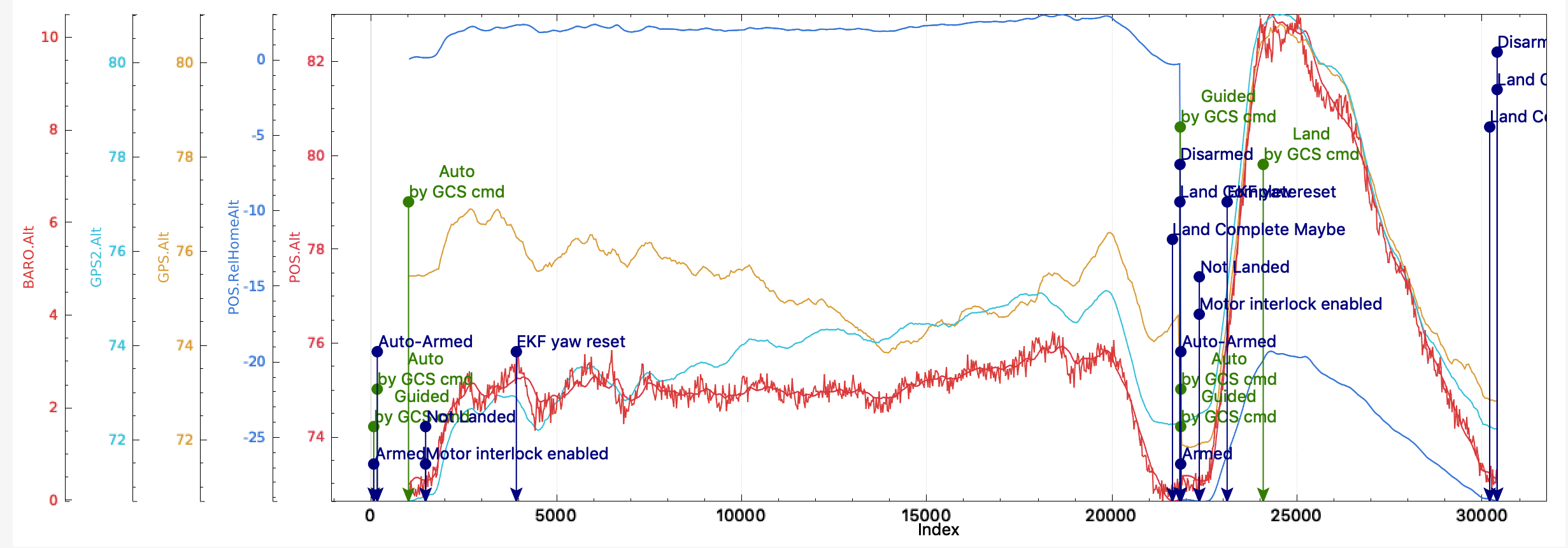
As can bee seen in the graph, gps, baro and estimated altitude are all consistent but the relhome alt suddenly drops. I am using Navio2 with rpi 3B+, latest emlid raspbian image, arducopter 3.6. External GPS+compass from 3DR. Barometer is covered with foam.
Any parameter settings? Are there any MAVRos command or similar to reset the home altitude before taking off?
Dataflash log:
log_39_2019-5-6-08-49-08.bin (1.2 MB)