



Yesterday I measured with Reach. In parallel I calculated the solution on my laptop using RTKNAVI 2.4.3 demo4 b18 executables from rtklibexplorer blog. I just forwarded the signals from the base and the rover via tcpsvr to RTKNAVI.
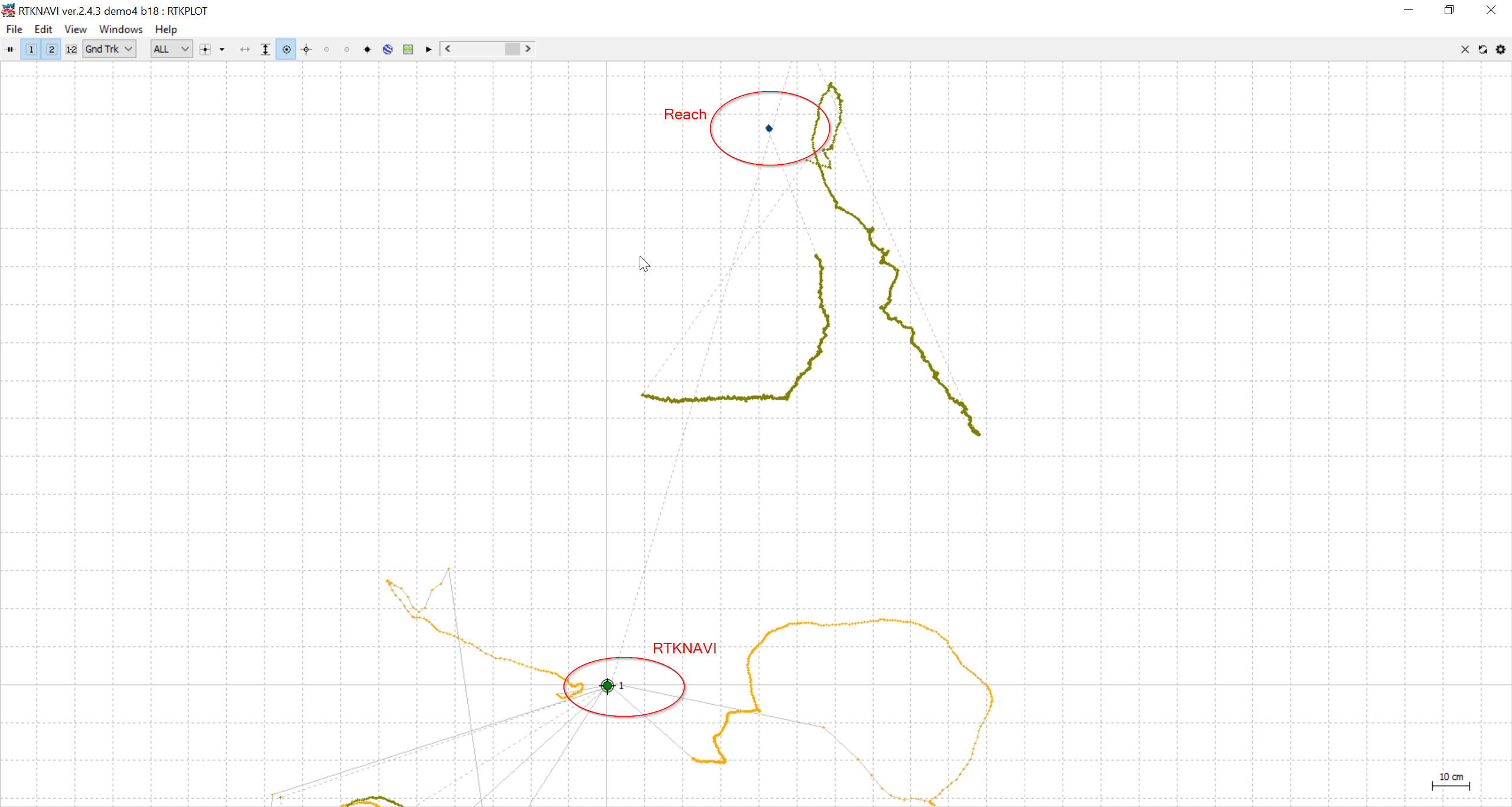
I could see, that the RTK solution differed about 1.5 meters. Also the solution in RTKNAVI was a lot more stable:
When i removed the following parameter-files the situation changed:
file-satantfile =…/…/…/data/igs05.atx
file-rcvantfile =…/…/…/data/igs05.atx
file-staposfile =…/…/…/data/station.pos
file-dcbfile =…/…/…/data/P1C1_ALL.DCB
I just did not set these values (like in RTKNAVI).
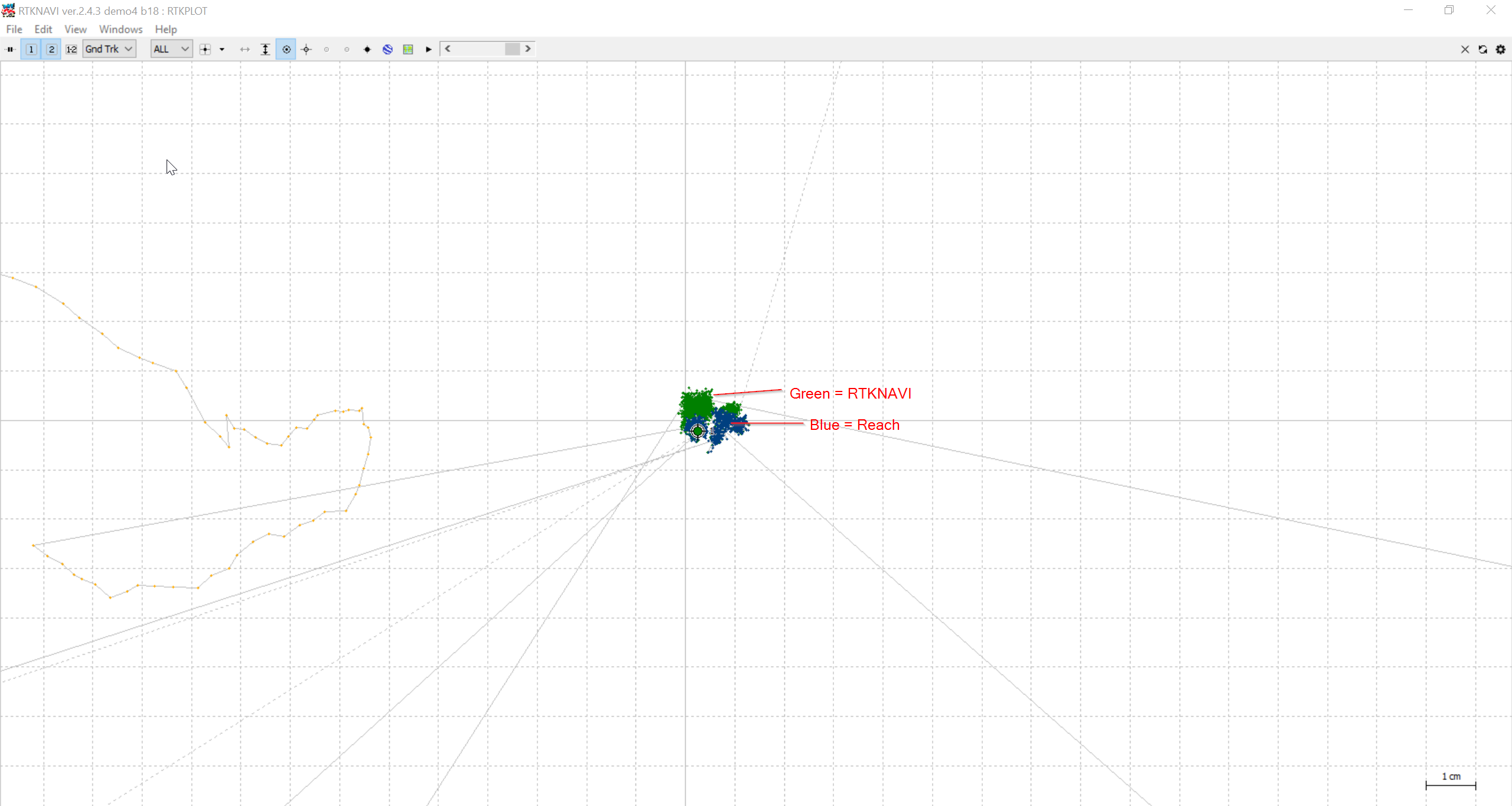
The results just differed 1-2 centimeters and the fix in reach was a lot faster and more stable:
So my questions are:
- From where is this huge difference coming?
- Are these parameter files really needed? In the RTKLIB documentation I just found, that they are needed for PPP