



We have been a bit busy recently to do testing with Reach, but we are busy doing a fairly large mapping project in Ethiopia.
During a test flight this morning, we placed a Reach on board our fixed wing RPAS. This highly modified Skywalker normally carries a Sony A5100 camera with rectilinear lens for about 110 minutes at sea level. The Reach was powered via a UBEC and the stock antenna tapped directly over the camera.
A base Reach with stock antenna was placed on the roof of our vehicle. An average base position was calculated,
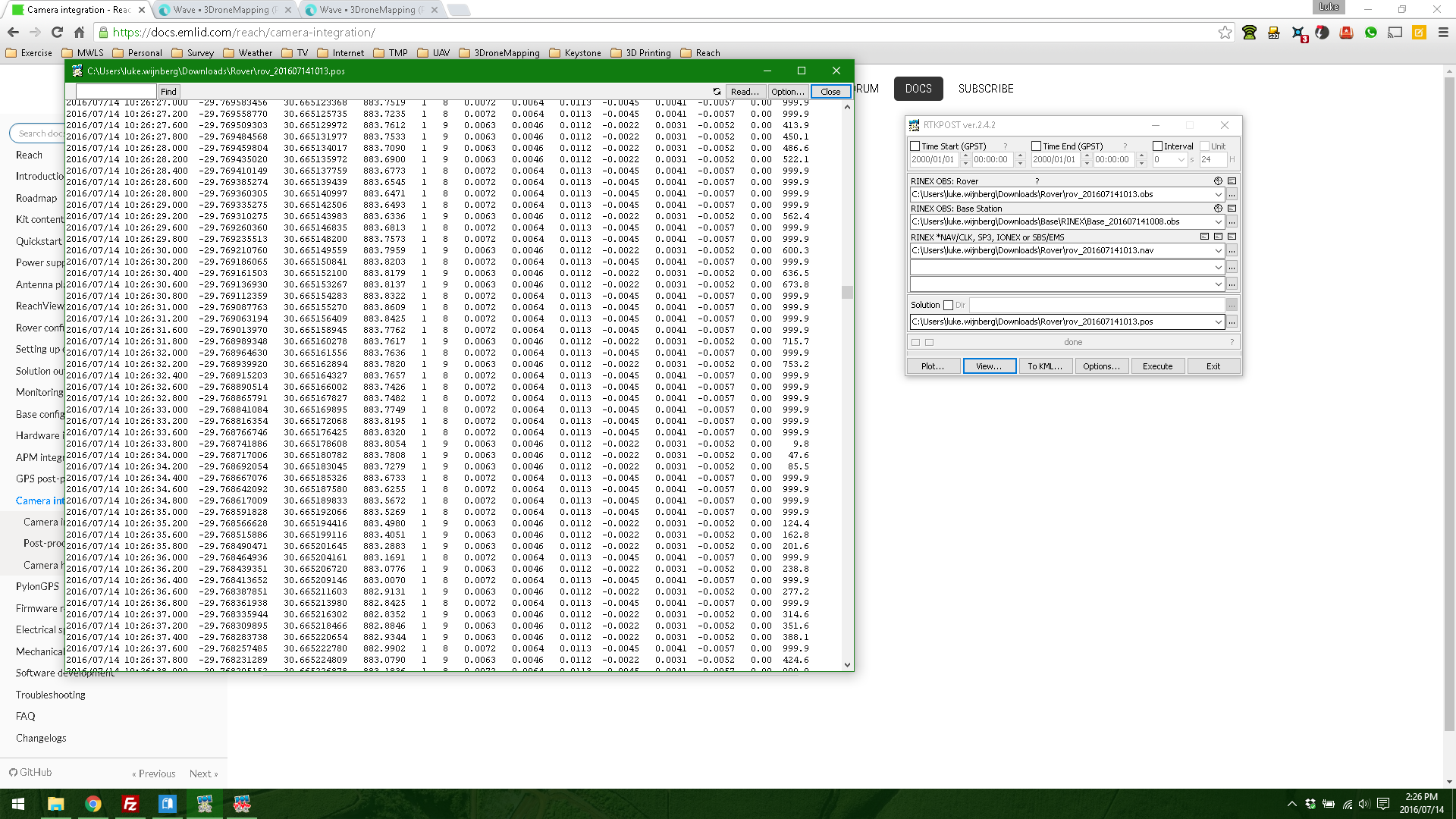
Both reach were set to record at 10hz GPS and GLONASS. The raw logs were downloaded and then post processed as per the instructions posted by Emlid.
Since there is no camera flash sync yet, we could not see the interpolated events of the triggers. But an excellent track log was created, first time round. There are very few events of the quality dropping to 2. These are found in the steeply banking turns as well as when the aircraft came close to powerlines. The maximum base line was about 1.5km. The total flight length was 29km in 35 minutes.

I am pretty impressed that it has worked out this well. However, the crux of it all is the camera integration part. If only we could utilise the WIFI onboard the camera as a sync for when dealing with devices that do not have a flash shoe.
Later next week, we will test the device with a Samsung camera with flash shoe. Hopefully the integration docs will be completed by then.