It is time to update to ReachView v0.0.4 . Simply hit “Update” button in the app to do so.
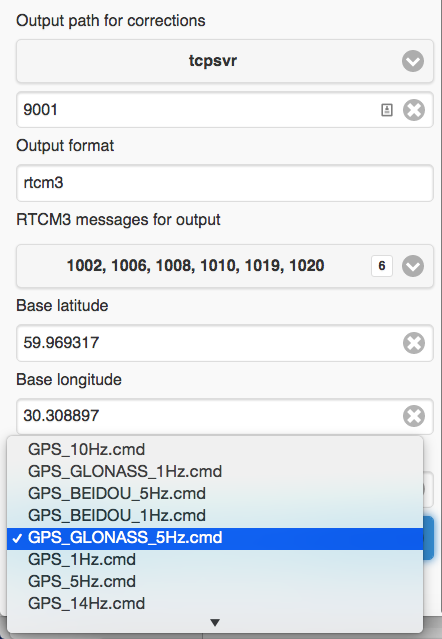
This version adds configuration options for GPS only, GPS+Glonass or GPS+Beidou operation at different rate.
As usual, thanks to @egor.fedorov for nice work
We are working day and night to bring new features to Reach RTK, so make sure to update regularly.
Great to see the ongoing development, keep up the good work!
A few related questions if I may:
Which RTCM messages apply for to Beidou usage?
Which version of RTKLIB is being used?
Can you think why I can’t see the raw measurements from GPS using RTKLIB 2.4.3 B5 but I can see the GLONASS ones? (This seems to be the case when looking for at raw measurements from either a base or rover)
@ivereninov Please let me know when new firmware is available that supports log download from REACH in Rinex format. I will be using the Rinex files to post process the recorded raw pseudo range phase timing data. That is done using NovaTel GrafNav software to get ~1cm accuracy on a moving object. That software needs a Rinex format to convert to GPB files, so I cannot use the REACH units til they have this capability. The alternative for us is to use a GIS grade receiver, which weighs ~3lbs with the battery and is rather clunky!
Any word on ETA of the Rinex output capability? I’m sure you guys are busy over there with Navio 2 documentation ect… but having Rinex output capability would let us accomplish quite a bit with this tiny receiver!
One quick question, I’m about as illiterate as it gets concerning GNSS so, what are the uses for Post Processing with RINEX, and what could it possibly gain me? And looking into Post Processing RINEX, is there any free software available to perform this, if it is needed?
@jstromsoe
My estimation is that Rinex conversion onboard will be finished next week. This is the main feature scheduled for next release. We have dedicated teams working on Navio and Reach, so progress on both projects is non-blocking.
By the way, since you have GrafNav, will you be able to make a couple tests with this software? It is a rather pricey license to buy just to check for compatibility.
Post processing is more precise, robust and can be accomplished when there was no communication between rover and base during data collection period. It can be performed using RTKLIB, or any other GNSS post processing software.
@ivereninov, sounds great! I’m sure you have some alpha/beta gate reviews after finishing up next week prior to release, but I’ll keep an eye on the download page. I can do some initial testing to see if the Rinex type you output will be compatible. Currently I’m using Rinex version 2.10, with NCT Markers. An example of the header is below. Maybe you can run it by the developers and see if the Rinex type they output will have NCT markers and be compatible. Also, typically two files are used in post processing, a *.N file and *.O file. I can get by with just the .O (observation) file. Let me know if you have anymore questions! And thanks for the hard work!
2.10 OBSERVATION DATA G (GPS) RINEX VERSION / TYPE
RINEX Version 3.6 NAVCOM Technology 01/12/16 07:55:20 PGM / RUN BY / DATE
COMMENT
NCT MARKER NAME
NAVCOM Technology OBSERVER / AGENCY
1001 R100 1_80 REC # / TYPE / VERS
101 NAVAN2004T ANT # / TYPE
-2372272.1360 -4783185.1679 3477727.7037 APPROX POSITION XYZ
0.0000 0.0000 0.0000 ANTENNA: DELTA H/E/N
1 1 WAVELENGTH FACT L1/2
5 C1 L1 L2 P2 P1 # / TYPES OF OBSERV
1.000 INTERVAL
2015 12 7 18 9 24.000000 GPS TIME OF FIRST OBS
2015 12 7 21 23 53.000000 GPS TIME OF LAST OBS
END OF HEADER
15 12 7 18 9 24.0000000 0 10G13G15G16G18G20G21G22G26G27G29
23929998.011 125752987.48007 97989352.30405 23930001.520 23929998.214
21557098.982 113283319.59009 88272713.46107 21557098.697 21557098.744
Also… Any chance you’re spinning you’re own Linux based Navio WITHOUT a raspberry pi, using the (MUCH SMALLER) Edison board? Its got 1GB of RAM and a 500MHz CPU… Looks like it would work theoretically?
Total of 40 GPIOs, which can be configured as:
SD card 1 interface
UART 2 controllers (1 full flow control, 1 Rx/Tx)
I2C 2 controllers
SPI 1 controller with 2 chip selects
I2S 1 controller
GPIO Additional 12 (with 4 capable of PWM)
USB 2.0 1 OTG controller
One last question, any chance the Rinex files can be output to the same bit of flash memory that is mounted when you plug the device into a Windows machine? I believe it is labeled “Edison” when plugged into a normal PC.
Otherwise, I’m going to have to write a Python script or similar to be able to get the logs off the device via USB. Some users of the device just wont have access to a WiFi hotspot to retrieve the logs, but this shouldn’t really be necessary.
This feature is used to update Edison’s firmware. I’ll look into using it to share logs.
However, if it requires changes in the image, it might take some time.





 The alternative for us is to use a GIS grade receiver, which weighs ~3lbs with the battery and is rather clunky!
The alternative for us is to use a GIS grade receiver, which weighs ~3lbs with the battery and is rather clunky!