



@fraser @rrr6399 There is indeed some issue when running for long period of times. We have tested it over the weekend and it is showing similar symptoms. We will investigate.
3 Likes
@igor.vereninov that’s great news. Please let us know as soon as you have a fix. We’re testing all this week.
hi i have also wifi connection problems with acutall beta. i had this never before!
if i connect my reach to my pc with usb and use putty i can connect to reach.
what i can see that reach(view) destroys /make a empty wpa_supplicant.conf…
if i remove this file i can connect to 192.168.2.15, i can add something to the wifi settings at the reachview frontend - but i dont work…
andreas
I know its an extra hassle for Emlid, but it’d be very useful to always have access to a firmware image for each release. That way if an update breaks something, we can always revert back to the previous version that was working by simply reflashing the Reach.
I had done all of my testing on the 2.1.6 over the last few weeks, but when I updated the other Reaches by flashing with the latest firmware released (2.1) and then updating it, I ended up with 2.2.1. There doesn’t seem to be a way to update to a given version right now.
Also, customers may not have access to WiFi in the field, but need to update the Reaches with a given version of the firmware. Having an image would allow updates over USB without requiring WiFi.
1 Like
Firmware Image : at old Firmware 0.4.9 I always used install.bat in the Firmware directory to update.
With new firmware and windows 10 this don’t work…
Hi. I am a surveyor from Russia and I will be need the customized coordinate systems (for example Pulkovo-42 GOST 51794-2008, SK-63, MSK) on Krassovsky 1940 ellipsoid, EGM96 geoid model. Whether it will be realized? Where I can see the menu now ReachView.
Hey Rob,
Just to be extra clear, we did not change anything wi-fi related in this new update, so these disconnect problems are quite unexpected.
Making this work requires a lot of input and, frankly, I don’t see many benefits from this.
Posting a firmware image is a lesser problem, though. However, I need to ask, what is the problem with just using the latest app?
Hey Sergey,
There’s no customized coordinate systems in Reach now, we’re working on that.
I can only advice you to change it in post-processing at the moment.
Stay tuned for updates 
1 Like
There are a few reasons to be able to load a particular version: I’ve been testing with a given version that was stable and need to be able to install that version in 8 other Reaches for 4 fielded systems; I need to be able to compare issues between versions; I need to be able to update a Reach to a given version without Internet access.
Also, I was seeing the Reach reboot itself while I was flying since the GPS would not update for a couple of minutes every 10 to 15 minutes. Were you able to duplicate that behavior?
Just having the images would be fine. No need to add an option to the automatic updates process to pick a version.
1 Like
BTW, I’m still using UBLOX messaging rather than RTCM3 to get reliable dynamic RTK fixes in the field within a couple of minutes.
I had to change the rtk.conf file in /usr/bin/RTKLIB/app/rtkrcv on the Rover to take care of the base position:
ant2-postype =single
ant2-maxaveep =1
ant2-initrst =on # (0:off,1:on)
1 Like
i did use my laptop to update reach with new firmware.
laptop (also win10) was 3 times faster then my homeoffice pc… strange…
now i was able to update and make new wifi settings…
starting to test now…
a
@rrr6399 The fix for RTCM3 generation was merged in 2.2.1, so there is no need to use ubx anymore.
2 Likes
I did notice that, but I still get more reliable fixes with UBlox based on my testing so far.
RTKExplorer released latest upgrade. So maybe another Reach upgrade coming.
I never got around to doing an open skyview test. I went back to my last test with Rover slightly west of North at approx 20.6 meter baseline. Using same Reach ubx data and post-processing with latest upgrade, the percentage FIX increased. Also, the good part is that in going from FIX to Float and back, there were no major shifts in coordinates for approx. 30 minutes.
The impressive part is that both Rover and Base had so many slips and still maintained a
consistent track (Static). I said previously that the ReachView solution never did reach FIX for the entire survey, but was stable and converging.
It seems that maybe there is something missing in the setup in the ReachView update. However, Emlid and Igor appear to be involved in the new upgrades, so I’m expecting another boost in performance here. I’m impressed…
(Oh, I clipped out convergence to first FIX to get better average)
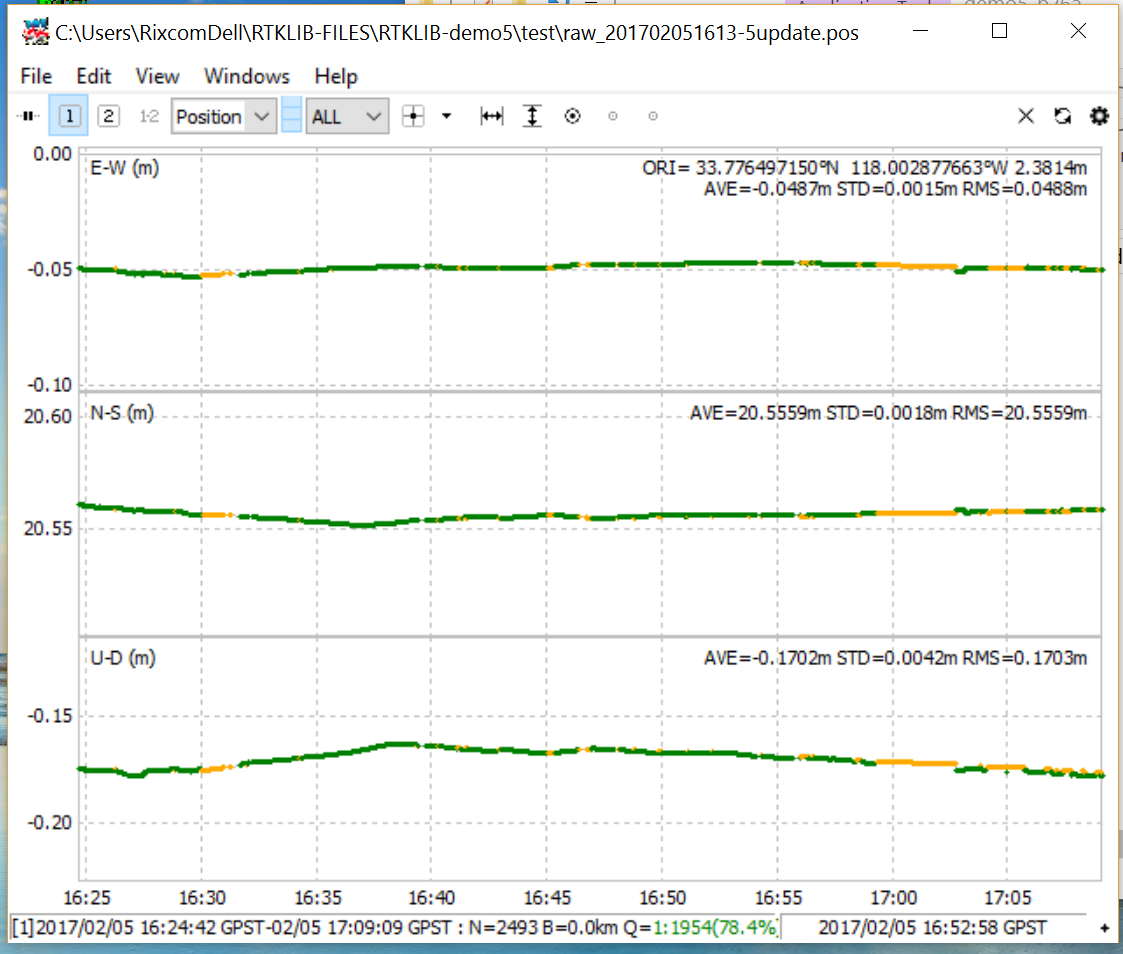
And, not real time, Combined Foward-backward post-processing…
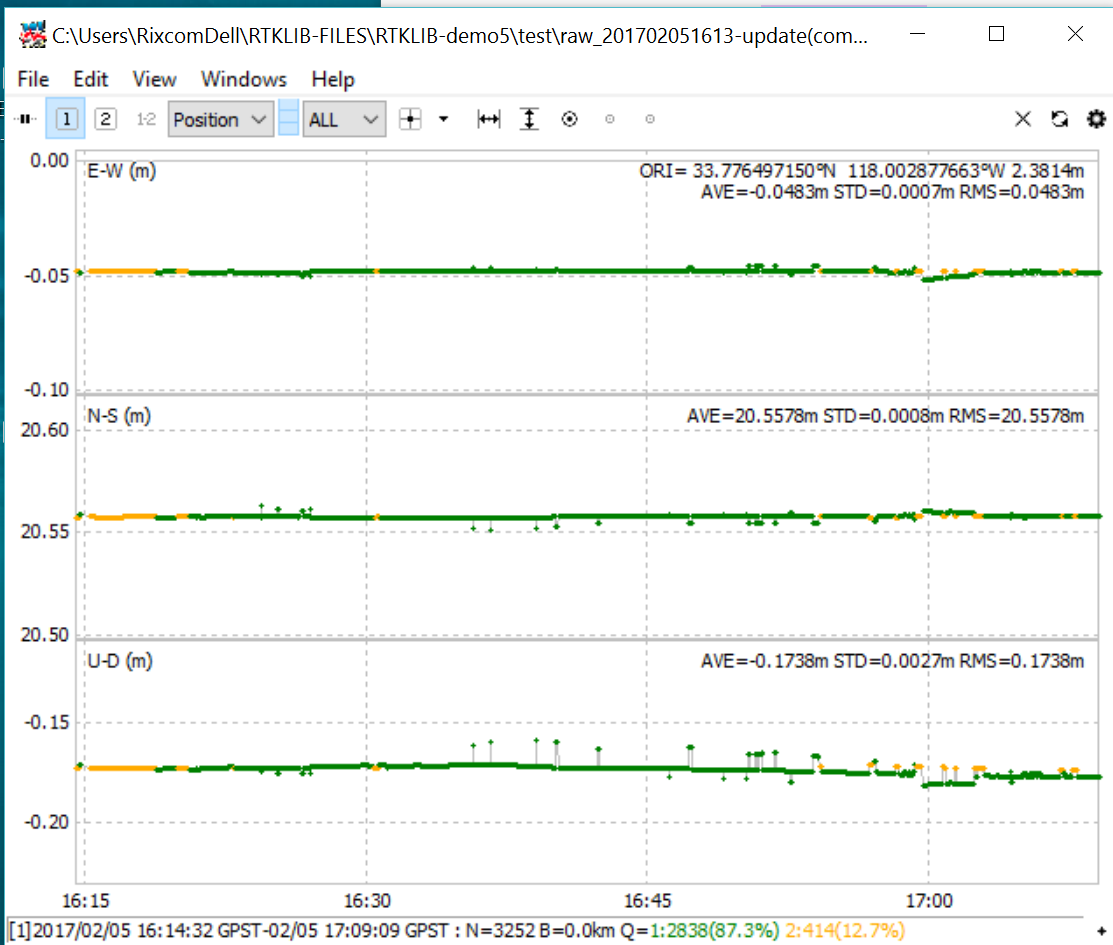
Can’t wait to do same test with good sky view!!
2 Likes
Just pushed v2.2.2! Release notes appended to the original post.
Regarding the wifi issues first mentioned by @fraser. We’ve traced most of the problems to wi-fi sometimes going into a power save mode. Currently working on a fix for this.
3 Likes
Just upgraded to v2.2.2…
OK!! Think we have a winner here!! Did a quick check with Rover & Base in my reference lousy skyview environment. Rover north about 1.5 m from Base and slightly to the west.
As in my last post, Static RTK results were stable and converging. However, Reach Real Time was only showing float. After about 30 minutes, I recalled a comment in one of RTKExplorer’s blogs about SBAS causing a problem with realtime FIXes in the US. So, I switched off SBAS on the run and observed the solution doing a nice clean convergence toward a solution. Shortly after this, I could see the AR Ratio slowly rising toward 3.0. After the AR Ratio exceeded 3.0, the the solution went to FIX and remained in FIX for about 30 minutes until I was satisfied. Not once in this quick hour test was there an extreme solution deviation. There were not too many cars passing by, but walking around the antennas with my head slightly above the Rover and Base, did not cause loss of FIX.
I look forward to other reports. It may have been coincidence that turning off SBAS allowed a good FIX, but this is the best FIX I have ever observed in real time under these bad conditions.
I will risk sending a big congratulations and thank you to the many involved in improving the RTKLIB, Emlid Reach and Ublox solutions.
(Oh. Slight problem, Seems Map Scale Axes got distorted again.)
1 Like
Turning of SBAS is magic… the results look fantastic but they are not true.
Turning SBAS on leads to a result which is also terrible wrong but still float.
Without SBAS
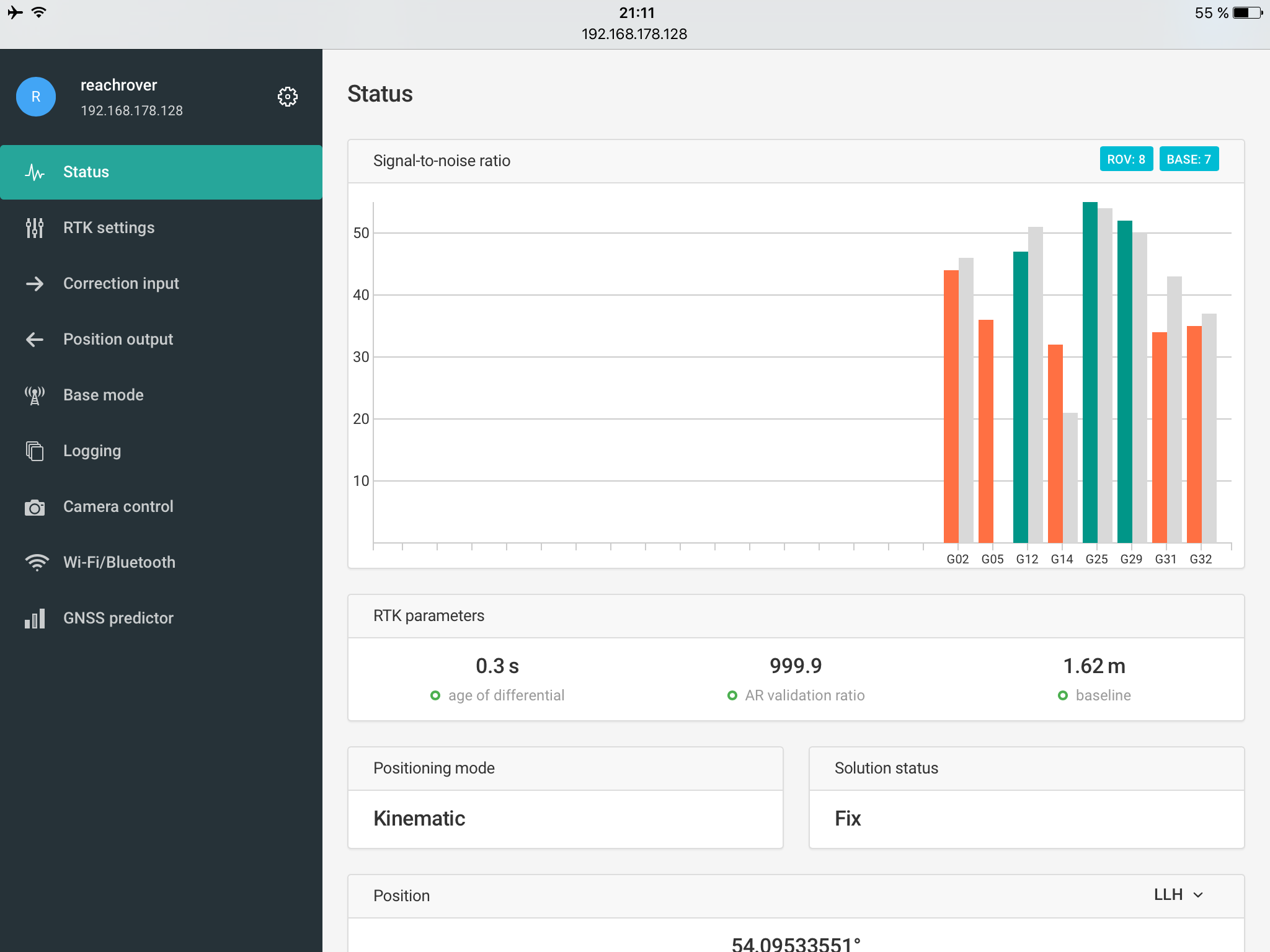
With SBAS
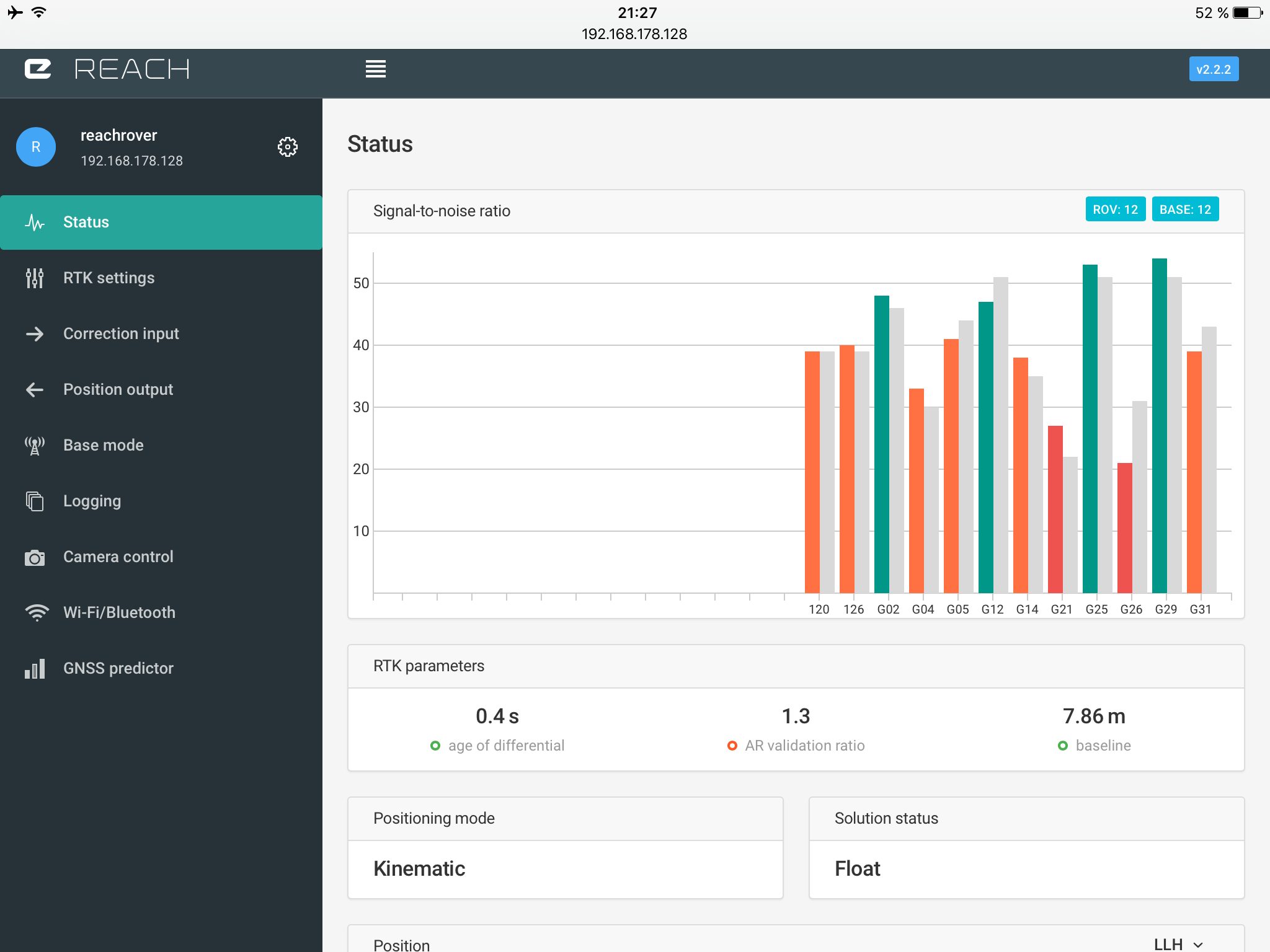
With SBAS and GLONASS
Antennas 50cm apart out of the window. Only 180° sky view.

2 Likes
Hehe, nice tobias.
Especially with 90 degree block in one direction 

2 Likes
I logged into the Reach with 2.2.1 powered by the serial connection of my Pixhawk and noticed that there were a few crash files. All of them were related to a kernel panic. I’m attaching a couple here.
logs.zip (112.4 KB)
I just updated to 2.2.2 and am monitoring to see if there are any more crash files generated.
1 Like
What I ask myself is why this is possible and why the calculation is not robust enough to avoid such results.
How can you trust the other results when such fails occure?