



Add GUI support to configure a moving base scenario
Add ability to configure and display all status information via MAVLINK messages so that WiFi isn’t required.
Document a REST (or whatever make sense) API that can be used to programatically configure the REACH and monitor the detailed status information to support 3rd party GUIs.
2 Likes
A message that notifies about GPS glitches etc… So that problems with the base/rover can be noticed in field.
Publish each release as an image and don’t force the user to update before the user interface can be used. I want to be able to use a given version without being required to update to minimize risk.
Just wanted to mention that this issue has been fixed and Reach will report both WGS84 and MSL heights in ERB protocol as ArduPilot expects it. The fix will be rolled out with one of the next updates.
2 Likes
Terrific, thanks!
@igor.vereninov I noticed that 2.2.4 was just released. It doesn’t look like the altitude datum wasn’t updated in 2.2.4. Are you publishing a list of changes for each minor release? It’d be nice to know what changed for testing purposes.
It’d be nice to just have a CHANGES file or page that listed each version and the changes. I’d also love to see firmware images available for each version to allow updates without WiFi and to install a specific tested version.
1 Like
We’ve had some difficulties with the Edison’s Ethernet over USB driver. Does the Reach support a straight serial connection over USB to obtain the UBLOX or RTCM3 correction messages from the base? (A direct RJ45 Ethernet connection would be nice in the future.)
3 Likes
+1 On Rob’s suggestions. We have found in our testing that the WiFi connection and update is the biggest challenge. When you are not in an office setting the general rule of thumb is, “Wired when able; wireless if you have to”
1 Like
+1 more to Rob’s request for image download.
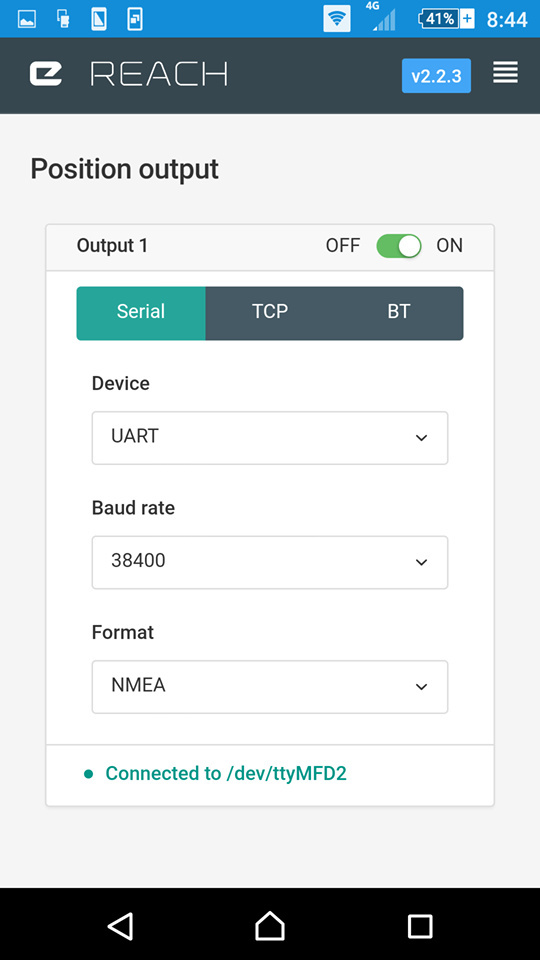
Hi, I have a question about ReachView2.x solution/position output.
I integrated reach RTK with Pixhawk, so ReachView solution output1 must set to serial.
But I also want to view solution at rtkplot when drone flying.
ReachView1.x have 2 solution output, so I can fly my drone and view data in rtkplot at same time.
But ReachView2.x only can select one way for solution/position output.
Although ReachView2.x have beautiful interface and convenient map, I still want to show data at rtkplot in real time.
How can I do?
For the time being, would it be possible to implement an additional NMEA string for the estimated errors?
Most NMEA compatible software will read the following message already:
$PGRME,15.0,M,45.0,M,25.0,M*1C
where:
15.0,M Estimated horizontal position error in meters (HPE)
45.0,M Estimated vertical error (VPE) in meters
25.0,M Overall spherical equivalent position error
This would allow people to view the estimated errors without switching between apps. (and, to be selfish - easy to implement into my android app).
Hello,
great work!!
Would it be possible to broadcast base corrections through multiple channels in parallel; I mean to be able to broadcast on TCP and UART (radio) at the same time. Then, depending infrastructure availability, the rovers would have to choose the best way to receive the corrections.
regards
1 Like
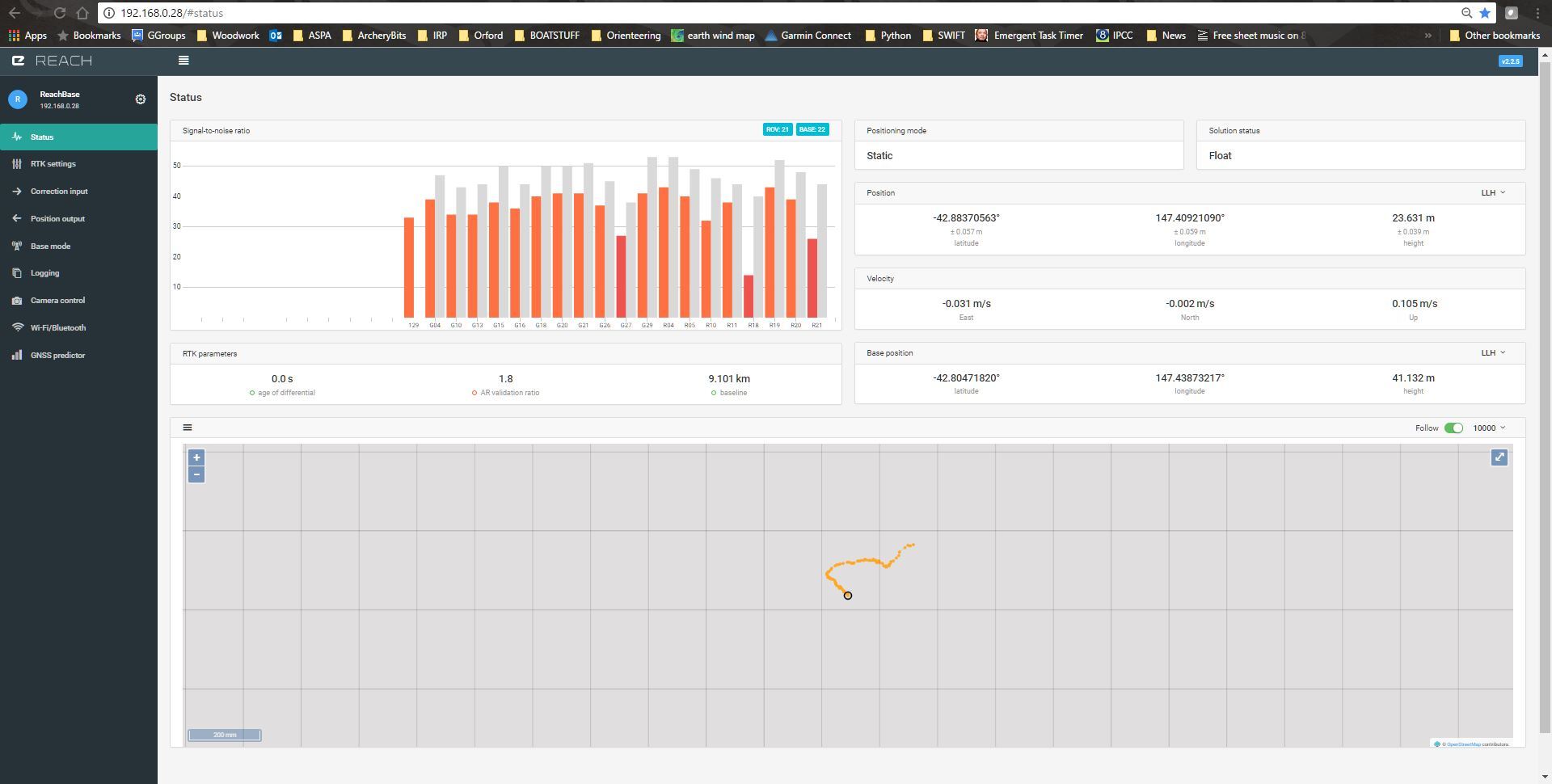
Would it be possible to condense the reachview RTK status display?
If I reduce the page to 75% in chrome display settings it all fits nicely on a 1920 x 1080 display.
But surely it would be better if the default 100% zoom fitted all elements on the 1920x1080 display?
Simon
I am very interested in Reach RS, but for me it feels like it hinges around the new surveying capabilities for Reachview. I need to see if it will replace my own survey equipment. I have talked to other guys around here and there is lots of enthusiasm and interest around here among farmers and construction workers. I think the guy yesterday that saw my Reach Rover and Base station would have bought two Reach RS’s if I could have let him know what the surveying part would be like. Another friend is ready to buy. Just waiting for the word from me. He will need to use it strictly for surveying as well and will need a device as simple as possible. That’s one thing that’s making this RS look so attractive. Looking ahead at the summer, I’m trying to decide what I should do and I feel like I need to see the survey app or have an idea what it will be and when it can be released before I commit to making any purchases. Line imports? exports? point imports?.. etc… So we’re waiting (impatiently)  Keep up the awesome work!
Keep up the awesome work!
It does not fit now? Could you please post a screenshot?
Point collection in ReachView is currently our top priority. We plan to have: projects, custom projections, Stop&Go point collection with naming and description, point export to multiple formats, stakeouts, point list imports. Simple yet highly automated and streamlined functions.
4 Likes
Runtime before last charge input would be nice.
1 Like