We produce a new drone and want to RTK gps adding.
Setup included pixhawk px4 (m8n gps) and Emlid Reach .
We have couple problem ;
Fly with ReachRS base connected drone have gps glitch.
In the loiter and PosHold modes it’s starting to travel constantly.
I try both of use best gps and use blend gps modes , nothing changed.
Base station not connected fly steady in same modes , but second gps (reach) not using continuously I try blend gps mode .In this case too I saw the second gps data is very bad
I’d suggest changing your hardware setup a bit to reduce GPS glitch: put Reach antenna on the double-sided tape and raise it higher if you can.
Also, could you share your logs, please?
Thanks for the suggestion
I already used the double-sided tape under the antenna, but I wanted to keep it more.
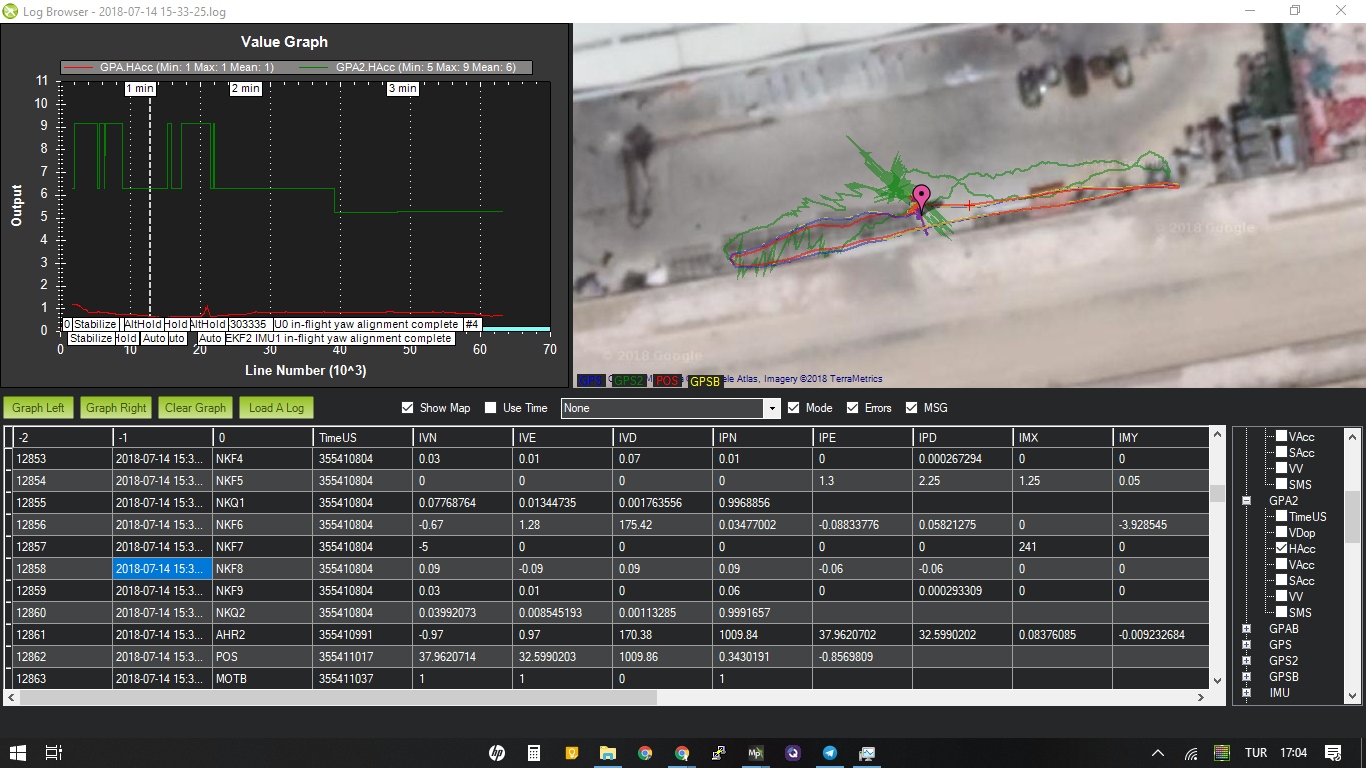
I will try to raise of the antenna.Could this be due to folding of the excess part of the antenna cable? 2018-07-14 15-33-25.log (5.1 MB)
The devices are not near me now. But I think I solved the problem. I’m not entirely sure. I’m going to do a few more tests.
Base and Rover only connected the GPS, in addition I set both 1Hz Update rate.
The PosHold mode is stable and does not show instability.