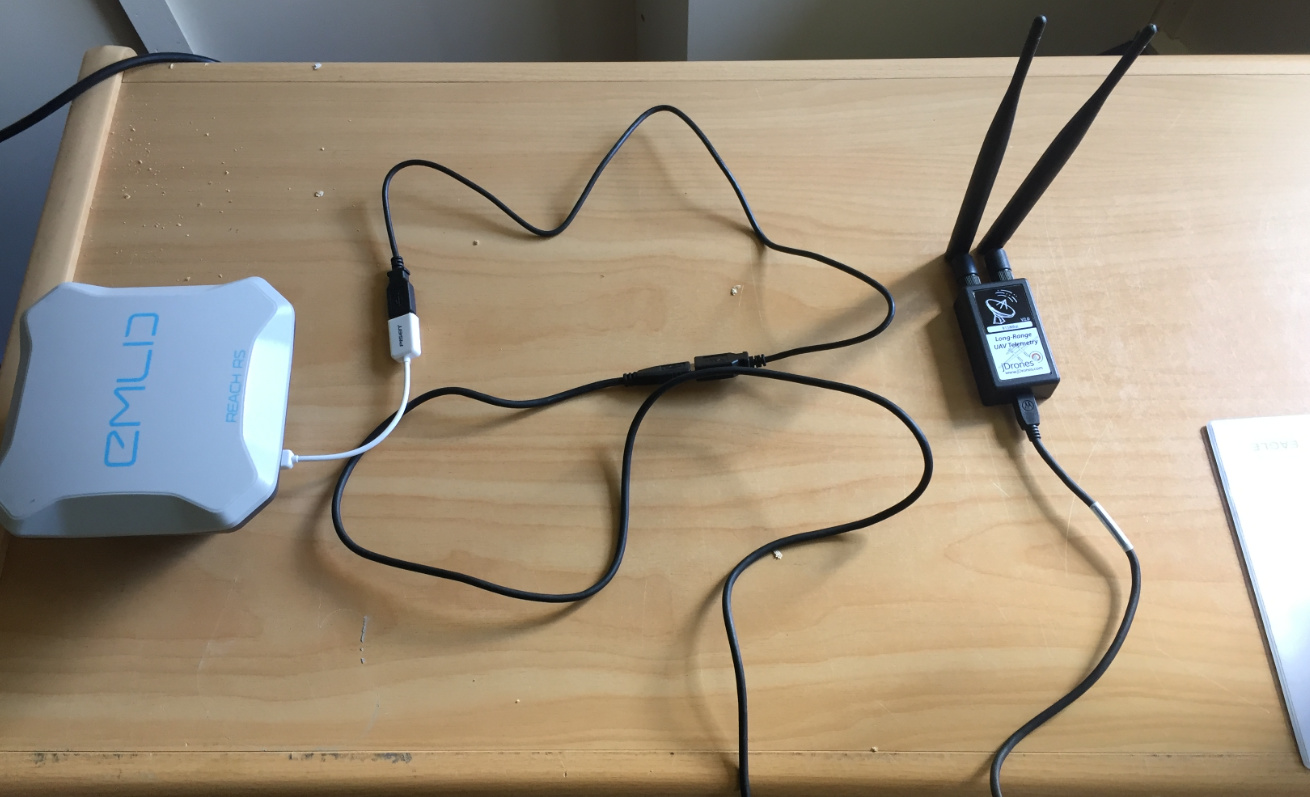
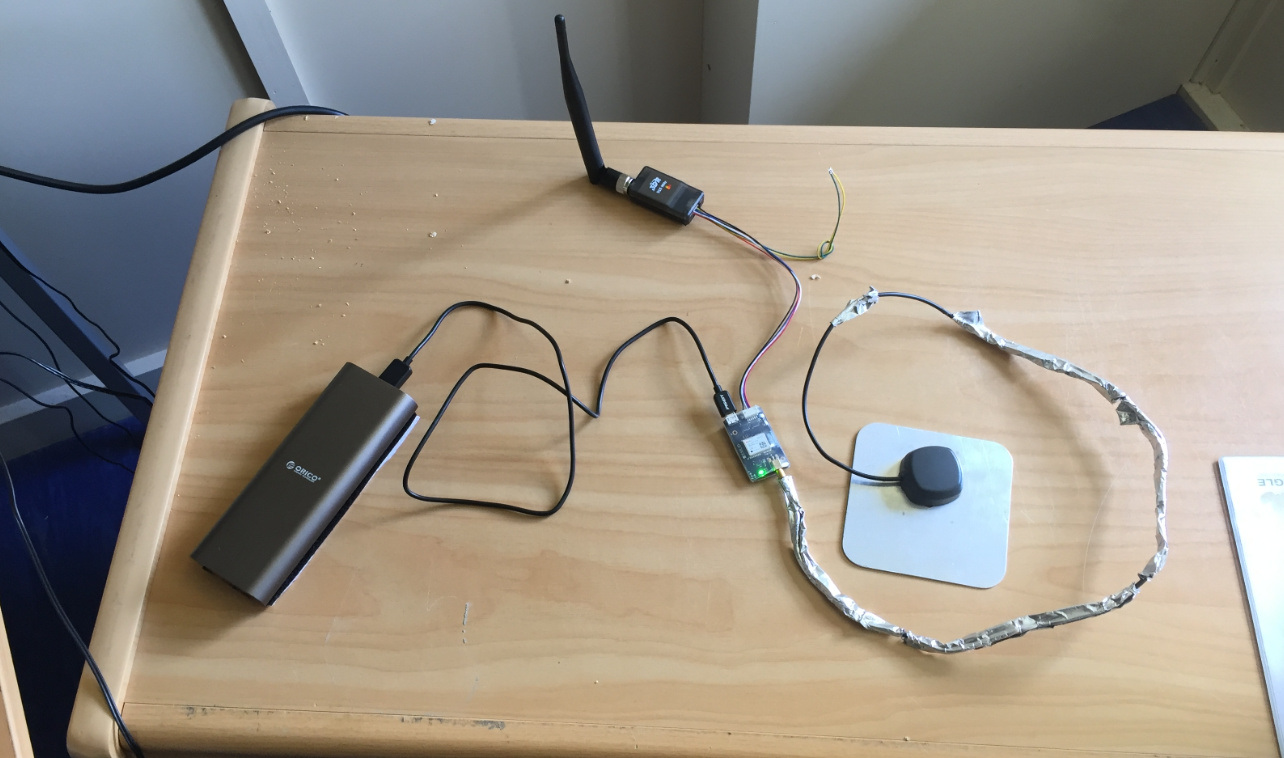
I’m attempting to establish a link via Reach RTK (rover) & Reach RS (base), via 3dr 915 mhz radio (on rover), and Jdrones 915 mhz radio (base). This combination of radio has been used successfully to provide telemetry for one of our UAVs.
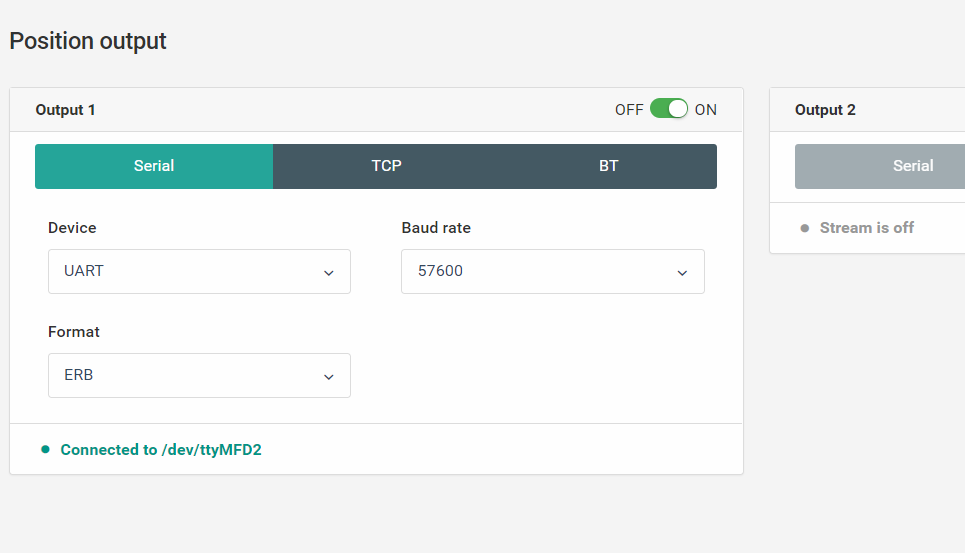
I have successfully established coms with grey correction bars via the TCP option, however when working across serial, I’m having no luck. Both units are operating with Reachview v2.14.0.
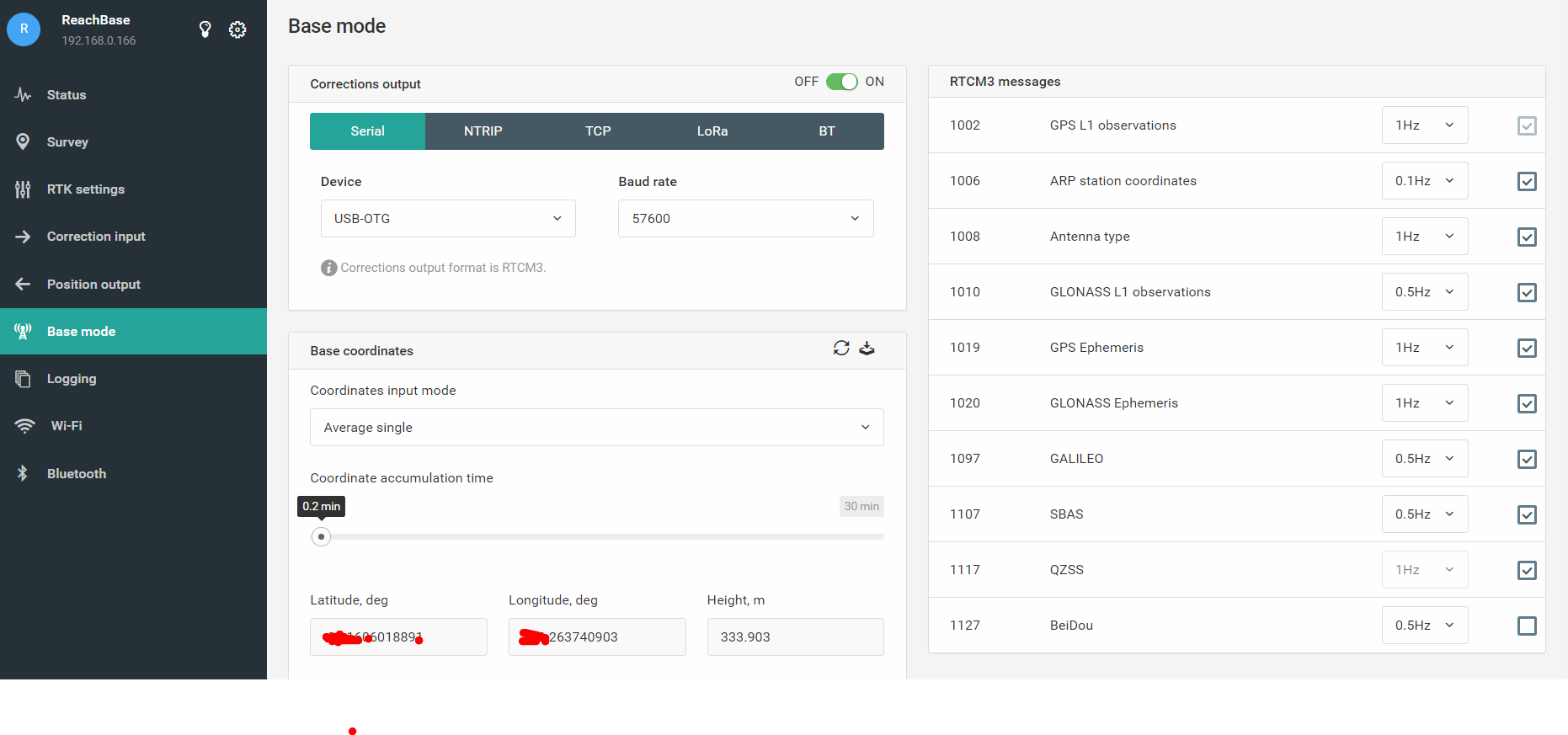
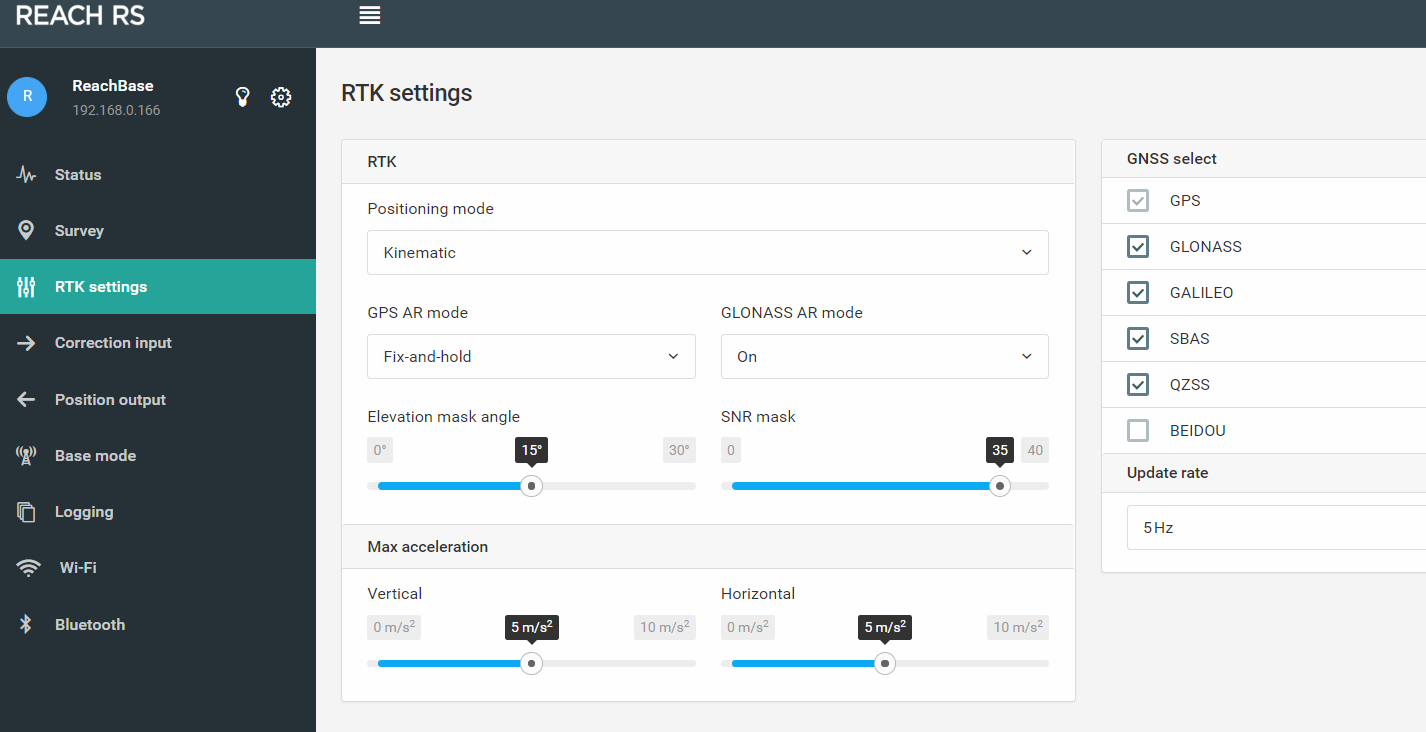
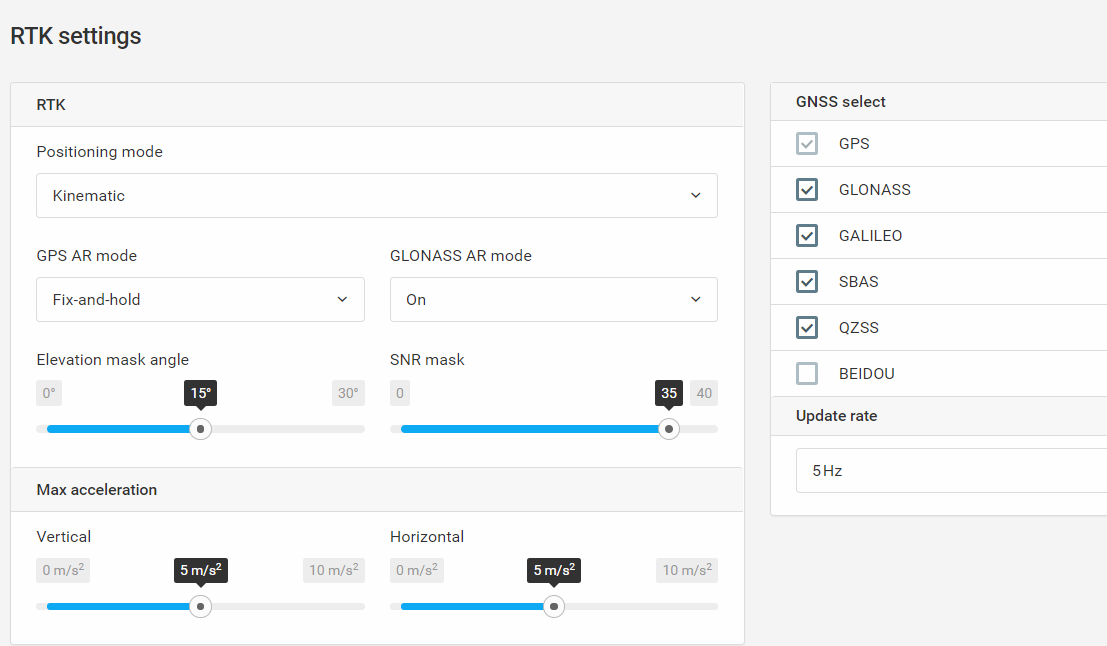
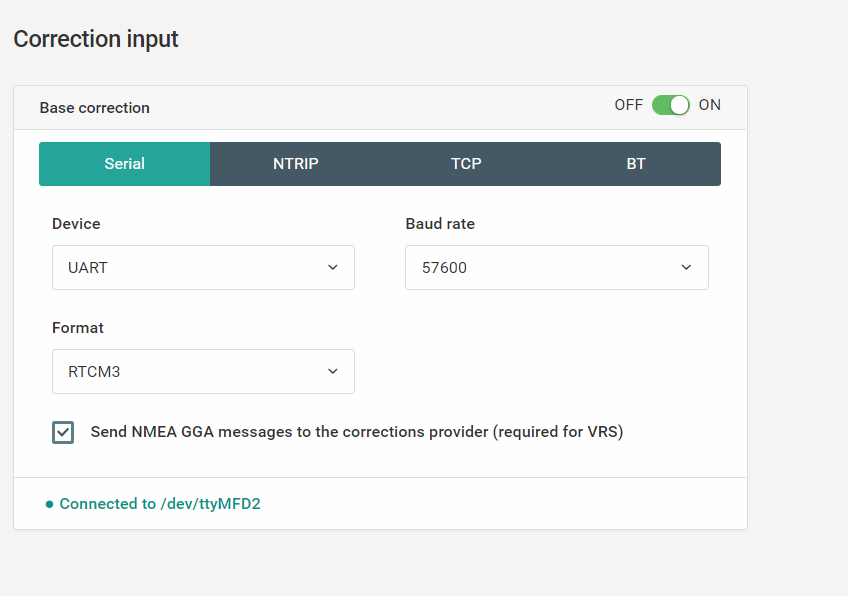
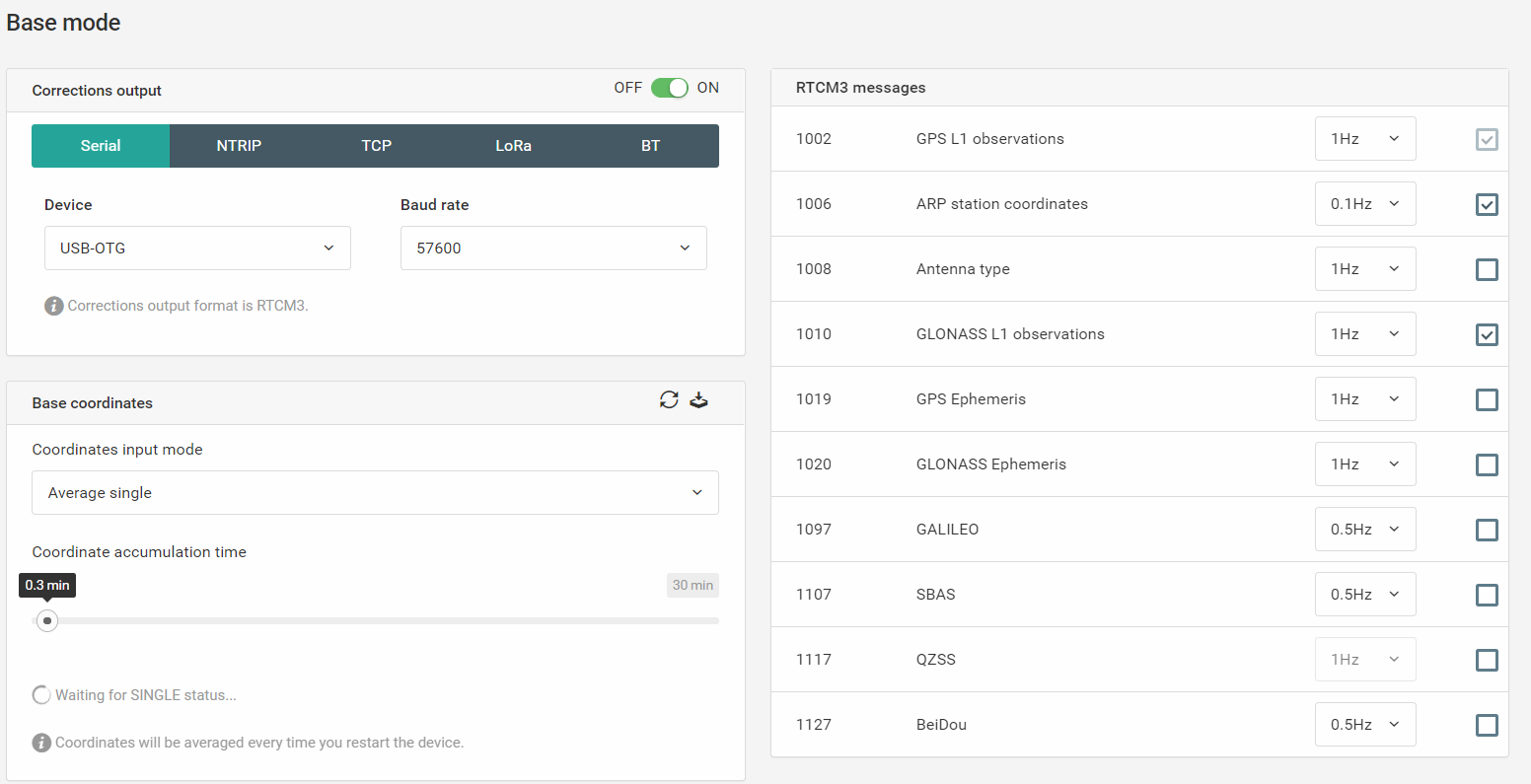
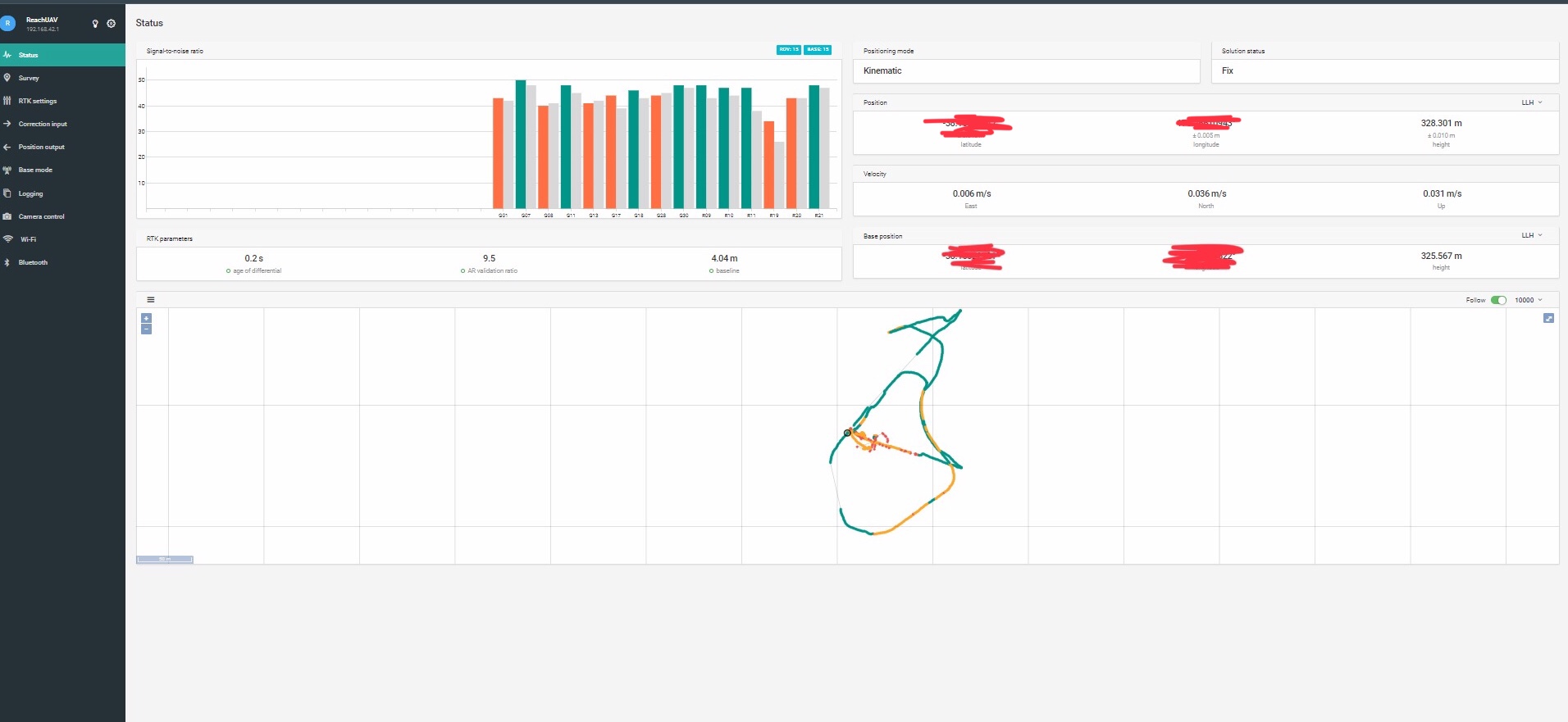
The configuration is as follows in the screenshots. I am working in New Zealand, FYI.
.I’m now using only GPS & Glonass GNSS. This hasn’t resolved the issue for me, and I’m not seeing the grey bars when trying to go via serial (radio). I’m wondering if there is an issue with the radio configuration. I’ve ordered a second set or 915mhz radios to try, and might dive in to check the configuration for the 2 I have. Given I’ve pulled it off a craft, I’m wondering if there’s settings beyond the baud rate which might need modification?
I’d recommend you to watch this video tutorial for setting base-rover LoRa communication. Main points will be the same as for the external radio. Hope you’ll find some useful information.
Can you share a system report by following these steps?
I’d been meaning to follow up. Yes, I recieved the 915 mhz “holybro” radios (3dr/sik are almost impossible to find it seems, in New Zealand), and they worked out of the box. Yesterday, I intended to test fly them with an old DJI Phantom 1 (yes, 1…), but it wasn’t happy with the payload (including powerbank). I can report that in spite of the pretty poor position I was in, with not ideal sky view, I had pretty regular fix. I’d still like to confirm that I have the settings optimised for iur conditions (rtk correction for UAV rover over short distance, in NZ), and am looking forward to some testing on a larger & more capable craft!
You can try to turn on QZSS in NZ region.
I’d recommend you to look at this doc section and play with settings to find the best configurations for your area.
Would you suggest a 14 Hz update rate, or the standard 5 Hz, for our applications? We’ll generally be tracking a uav moving at up to 7 m/s or thereabouts. Speeds will exceed this when taxiing to the start / from the end of the points of interest however.
The more frequency value you set the less number of GNSS you can turn on. There’s also a 10 Hz rate between 5 Hz and 14 Hz.
So, you should find a balance for your workflow. The only way to do it is to make a test