After finally getting both of my reach modules alive, I was able to configure them as a base station and a rover and send corrections through Wi-Fi in order to achieve centimeter level accuracy.
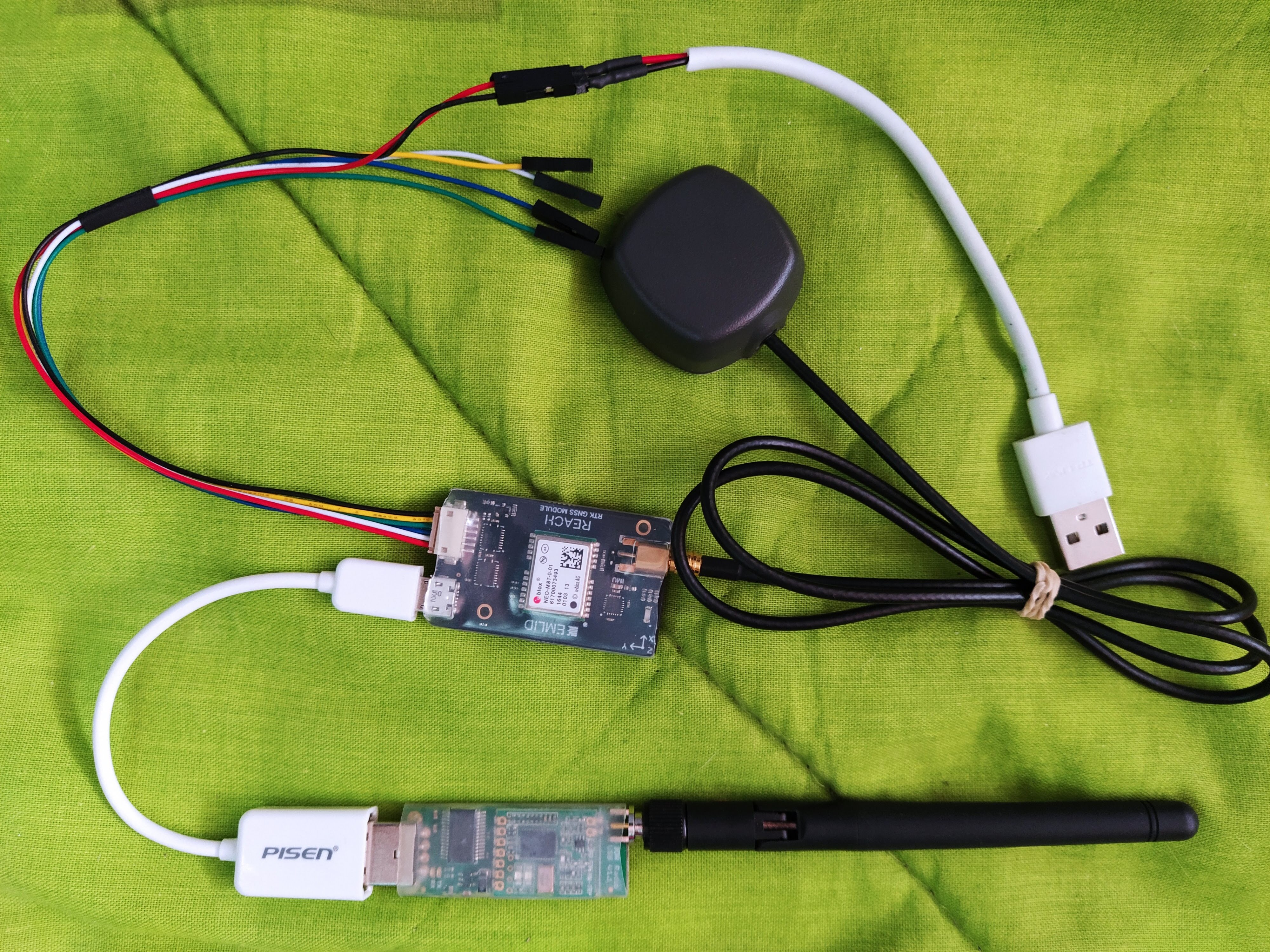
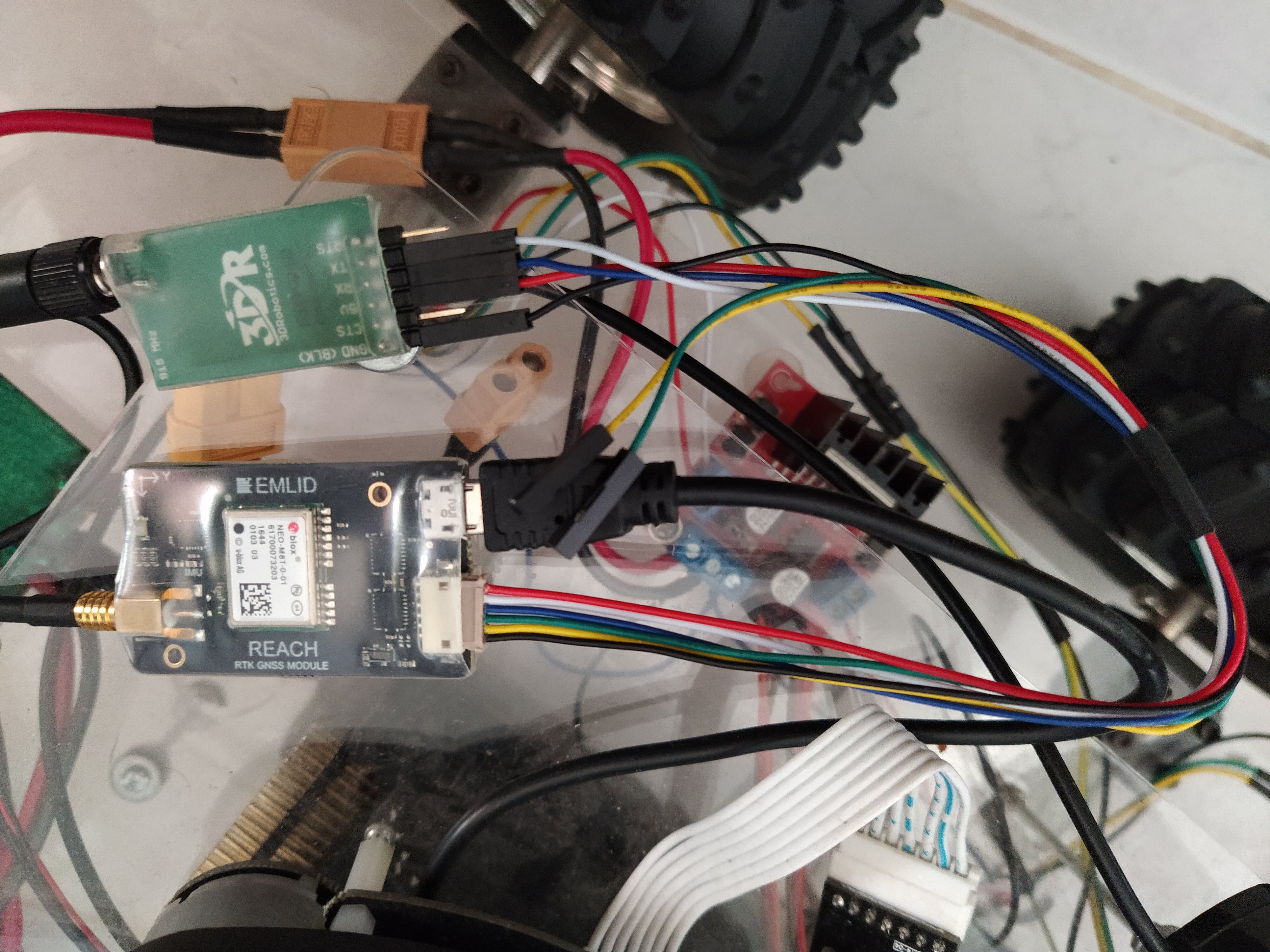
I would like to send the RTK connections through a pair of 3DR 915 MHz radios. So, I configured the base station with the USB OTG module and starting sending corrections over the USB on the GO serial interface at 57600 bps. On the rover side, I configured to receive corrections from serial interface at 57600 bps. The connection is established and the rover module starts receiving corrections, but after aproximately 20 seconds, the rover stops receiving corrections and RTK precision is lost. If I turn the corrections off and on in the rover side, I start getting corrections again but after some time, it stops. I attach some pictures of my hardware setup.
Have you tried swapping the roles of the units to check whether the issue repeats? If no, please configure the current rover unit as the base, the current base as the rover. Please swap the radios between them, as well.
Yesterday I was able to try the things you suggested. It seems to work if I use the UART to send the corrections and the USB-OTG to receive them. However, the transfer seems a bit slower than using TCP and the rover fix status changes from Single to Float quite often, so I need to check some more things before I can use this setup on a daily basis.
Is there a known default or optimal configuration for the 3DR radios to work with the Reach Modules? I recently found out that you can configure certain parameters of the communication with the Mission Planner software. For example, I don’t unserstand why would it work if I change the radios from receiver to sender (or vice-versa)
The delay might happen because some operating radios nearby are on the same frequency as your radios. I’d suggest changing the allowed frequency for your radio to check if it helps.