I am involved in both traditional and barefoot water skiing and setting up ski sites these days for record capable tournaments is rather complicated. In particular for traditional or 3 event skiing, the slalom course balls or buoys have to be positioned with high accuracy to create a perfectly aligned record capable homologation level. In the jump event the jump course has to be reasonably accurate (though not as precise as slalom) but there are a number of “grid balls” and video cameras that are used in the jump event with video jump measurement systems such as the Bob Corson, Olaf Boettcher, Felix Loreto and Splasheye systems for distance measurement.
All of these require site surveys in order to verify that they meet all homologation criteria and produce accurate jump measurements.
Barefoot water ski sites are similar in that the barefoot water ski jump measurement requires an accurate course for the boat to drive through and accurate grid balls used to measure the jumps with any of the previously measured video jump measurement systems.
Typically a site survey was at least a two person operation requiring one person operating a total station on shore and one person positioning the reflectors on each ball/buoy out on the water. Positioning the total station so that it has line of sight view of each and every ball in the water can be a challenge. the cost of a total station is high. It can be done with a transit and multiple points but this typically takes 2-3 times longer and measuring that many extra points adds risk of error in measuring or recording.
I am hoping that a pair of Reach RTK units and a mobile device such as a laptop or a tablet can be used instead. This would allow surveying to be done by a single person recording the data points instead of two people and it can also be done in the dark when a ski site is typically not in use and also much calmer as the wind typically dies in the evening.
Surveying on water offers both advantages and disadvantages. One advantage is an excellent sky view. Most sites have an unobstructed view of the satellites. Line of sight communication by radio for RTK correction data is usually easy and radio interference is usually lower in the more rural areas where ski sites are typically located.
I am a year into this project and only part way along due to time constraints but recently I retired from my full time IT position and have been spending more time on this and thought I would write up my work so far in hopes that others can learn from what I have done and contribute suggestions to help me along.
I purchased the Reach RTK units last June and at the time they were pretty new and to be honest, I was having trouble even getting a handle on how I was going to go about this. I also fly drones and was looking into Pixhawk integration and the two combined helped me get to where I am now… which I think is pretty close…
Since I purchased these, the ReachView has matured considerably and a recent addition is the builtin Survey mode that if I am correct in my understanding, this is all I need to make this happen. Thanks Emlid! In addition the ability of the Reach to determine its own position using time average data points greatly simplifies what the operator needs to do to get things set up on site. Initially you had to manually enter base coordinates and they had to be pretty accurate and water skiers are not GIS experts or surveyors generally.
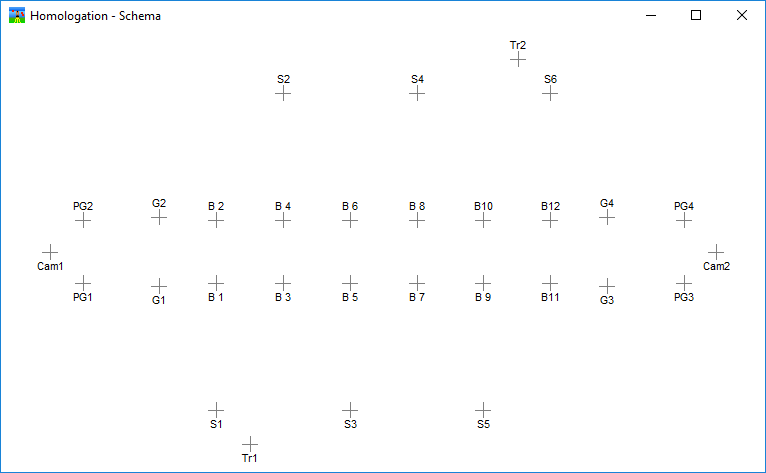
The general scenario is to have a base unit at a fixed known spot at the ski site that communicates the correction information to the rover unit. The rover unit performs the actual survey and is moved from ball to ball to ball out on the water and at each ball a point is recorded and named according the the water ski homologation dossier conventions for each point on the slalom and jump course.
Here are pictures of the two units I have created for the task.
This is the top view of the unit showing the high tech pie pan metal antenna base on top of a household container holding the guts.

This is a picture of the guts of the operating base station.

Here is a closer view. You see the Reach unit, the 3DR SIK radio. Power if fron the large black portable battery pack that provides a USB power source to the Reach unit and the radio gets power from the Reach. That battery pack appears to be overkill. Been operating for 8 hours and still going. See the power for the Rover. More appropriate.

Here is a shot of the Rover unit. This will be placed on a “ring float” that we have already used to hold the survey prism over the ball in the water directly above the top centre of the ball. Notice the smaller red power pack in this one. This is a small portable battery pack that I got free at a trade show for recharging cell phones. This actually powers the unit for about 4 hours on a full charge which is amazing, The unit (including SIK radio) draws under 200 ma in operation!

The first task was getting the Reach units to communicate correction points from base to rover. Since ski sites are up to 1000m long and wifi is a challenge for long range, I opted for radio links for corrections and as I had experience with the 3DR SIK type radios with drones and they have excellent range and communication speed I went that route.
Wiring can be a challenge because there are SO MANY varieties of these 3DR compatible radios so I made a short YouTube video that goes over this and touches on the parameters required in ReachView to get the corrections working.
You can watch the video at Emlid Reach RTK setup - YouTube
At this stage all I have accomplished is getting the base and rover units assembled and done one quick survey on my street where I simply moved the rover along the curb and then exported the survey points into all possible formats to look at. My points were collected manually, not using the survey automatic methods. That will allow me to name them and know which point is which.
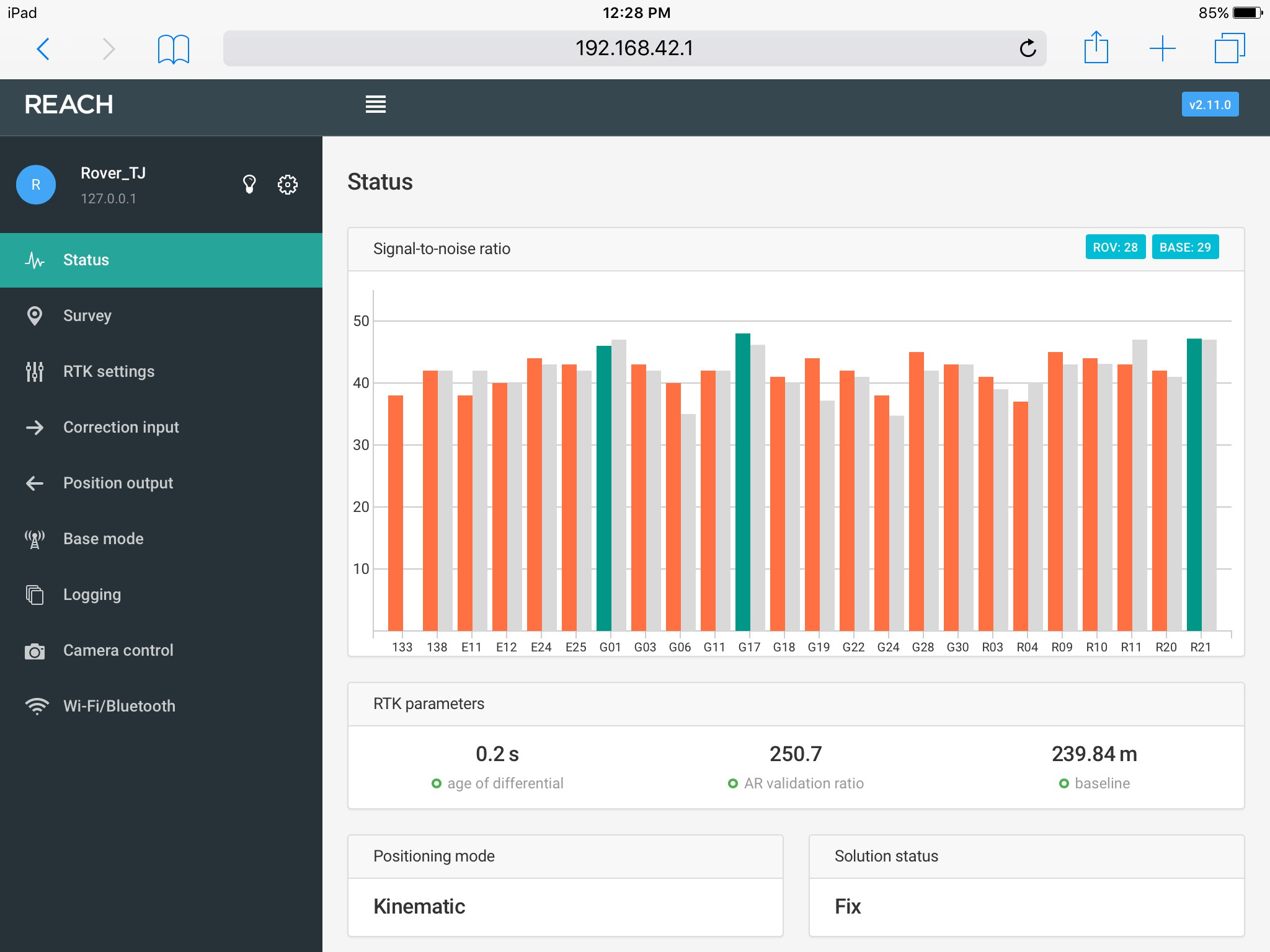
The base and rover are unable to connect to any WiFi so they act as WiFi hotspots and it is simply a matter of connecting to the base unit or rover unit WiFi hot spot from an iPad or other mobile device and connecting to 192.168.42.1 in your browser such as Chrome or Safari. Connect to the base first and ensure you have an accurate base location. The default is 2 minutes, I opted for 5 minutes in hopes that it is more acurate. Then connect to the Rover and start a survey and capture data points. When done, export the survey and massage the data.
Where to from here?
Well, a lake survey will be next… I will try my slalom course first, see how that works out, then survey one that has already been surveyed at a ski site.
First challenge is that I need cm accuracy for this so I have to ensure that I can get survey points that are better than Float so I need to ensure that only Solution Type FIX points are used. I won’t really know if this is possible until I try at the lake.
Another challenge is taking the points from the survey and translating them into a format that is suitable for the water ski homologation programs that are used. I suspect DXF file may be the easiest to convert but if anyone has suggestions I am open to hear them. The programs typically expect X,Y coordinates or polar coordinates… not lat/long coordinates… this is not my strong area of expertise… Once I have data I will work on figuring out the conversion.
I am also not sure about all the possible parameters. Some are shown in the video. For example, should I disable GLONASS L1observations and use only GPS L1 observations (hints to that in reading some forum posts on not getting FIX Solutions). Should I up the RCTM message rates for these to 5HZ since the 3DR SIK radios are operating at 57600 baud and should have lots of bandwidth for the traffic.
Are there different antennas I can use with the Reach units to get better signals and thus (I assume) better accuracy?
Are my aluminum cake pans sufficient to avoid reflected signals from the water?
Will my wife want her cake pans back?
Is this a finished and working project? No. I am posting hoping for constructive input from others that have more experience than I do at this! I also hope that this inspires others that have been thinking of doing the same or similar and may be willing to contribute their expertise!
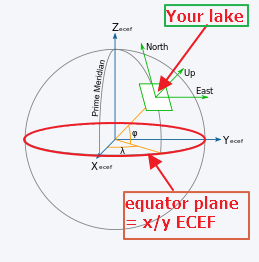
 East North Up.
East North Up.