



Ok, I did a flight yesterday.

I have 2217 events and 2221 images. I have to admit that I’m not absolutely shure (yet) if this is caused by me or by cycle slips or by the GNSS combination. I will look into that (and report) later when I process the images and compare the events with the Arducopter logs.
The SNR of my base (Reach RTK, left) with a 12 cm groundplane and a 100% clear sky view and my uav mounted Reach RTK with a 7 cm ground plane (right).
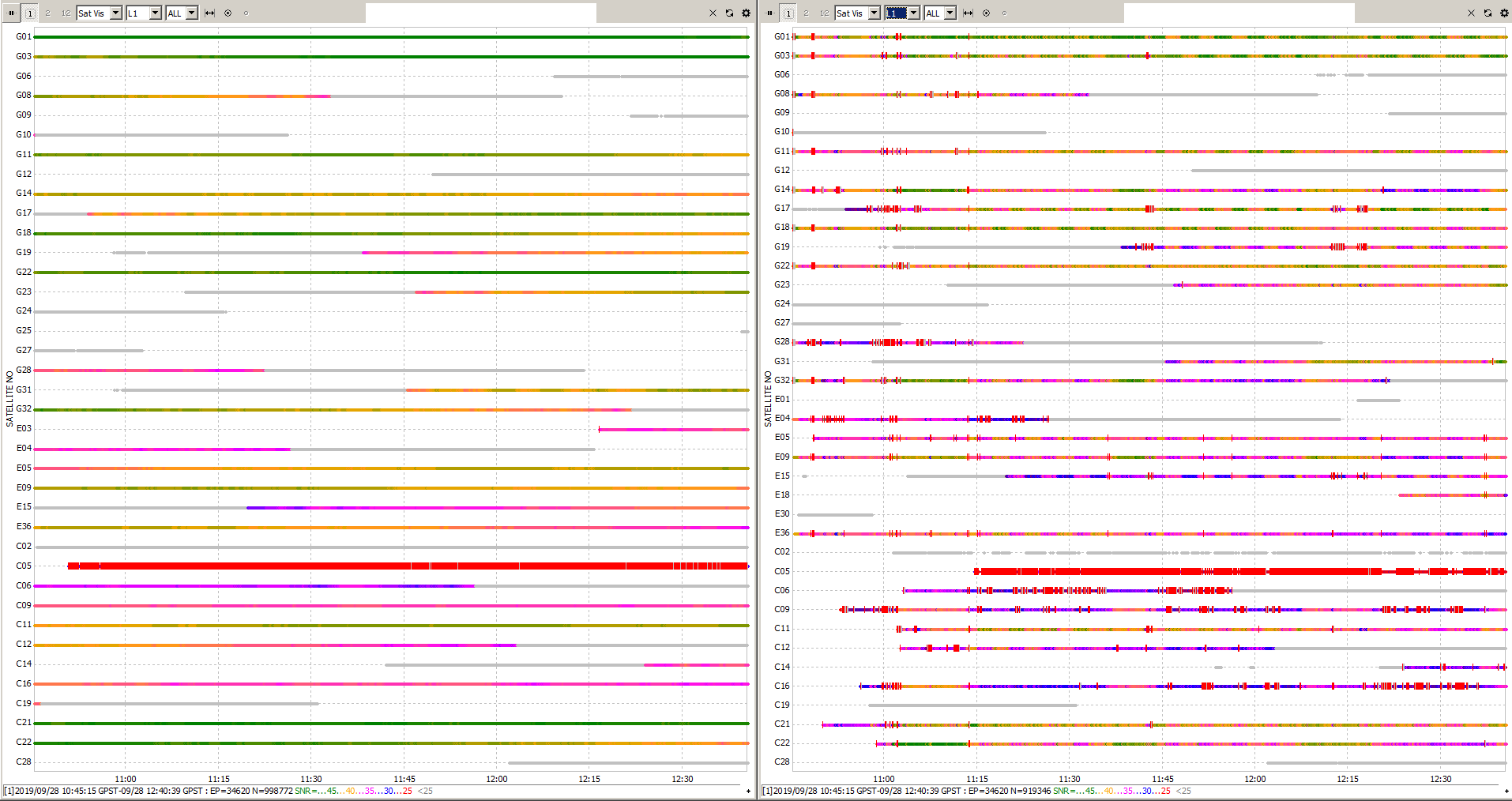
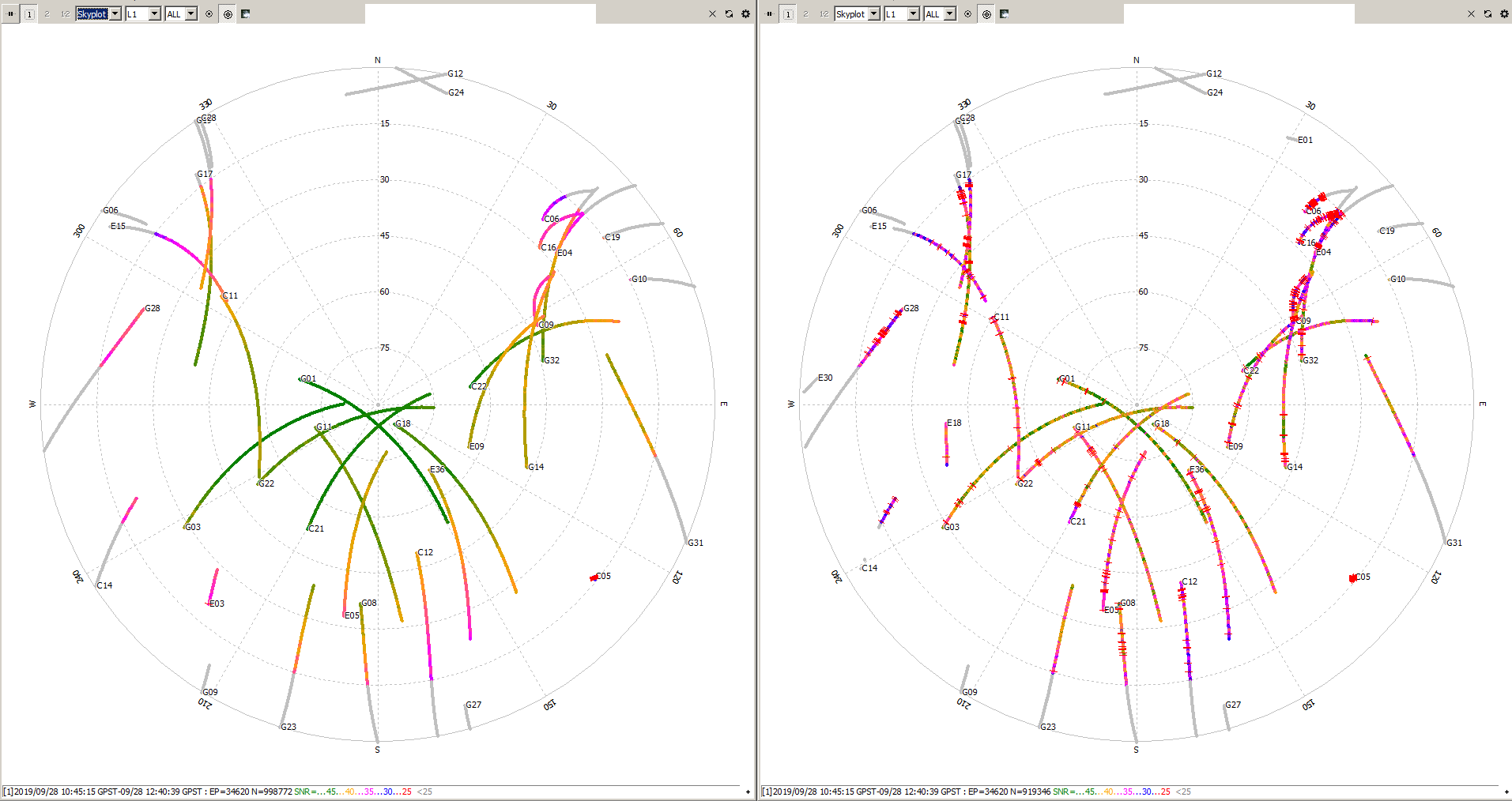
What I will have to do is to invest more into noise shielding (you can actually see in the graphs that I added some aluminum tape at around 11o’clock). I would be very interested in some images and concepts how others do it. I will try to shield the antenna better.
I’m not so sure whether the power source, the time mark connector and the rx/tx to arducopter are a source which need to be improved too. Any concepts what you do to improve your SNR and reduce cycle slips?