Great news for all the eBee users and drone mappers out there! senseFly has successfully tested the Reach RS2 base station, and we are excited to announce that the Reach RS2 base station is fully compatible with eBee RTK, eBee Plus, and eBee X drone. Emlid and senseFly customers can now take full advantage of both technologies for all their high-accuracy mapping needs.
Reach RS2 acts as a static base station for both RTK and PPK scenarios. The receiver connects to the senseFly eMotion flight planning software and streams the corrections when the drone is operating in RTK mode. For PPK, the Reach RS2 records RINEX logs that can later be used for post-processed with eMotion’s flight data manager.
senseFly is famous for its leading drone solutions, and its drones are widely used in a variety of industries, including mining, surveying, precision agriculture, humanitarian, conservation and more.
For more information, check out these tutorials to learn about the workflow between senseFly eMotion and Reach RS2.
It seems like we’ve been communicating by email. Let me post my answer here as well.
According to the information from the DJI site, the DJI Phantom Multispectral drone can obtain corrections for RTK via NTRIP.
Reach RS2 can output its position in RTCM3 format. You can check this section in our docs for more details. To create your own NTRIP caster, you can use, for example, SNIP or RTK2go service. It should be possible to connect the DJI Phantom Multispectral with your own caster and obtain corrections for RTK flights. However, we didn’t conduct our own tests for this integration, this workaround is in progress right now.
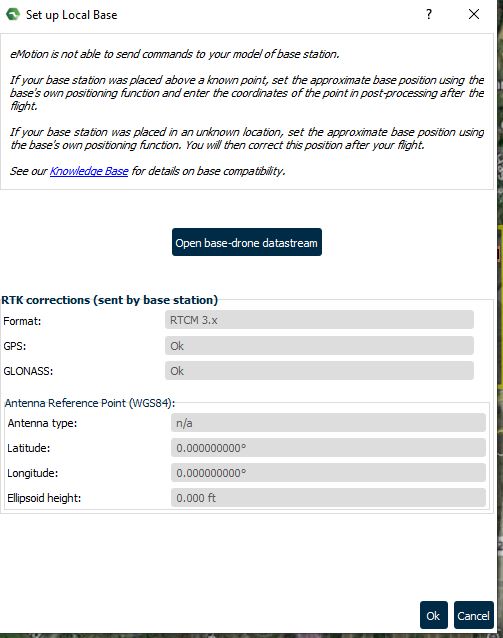
I work with eBee X and we pretty much have a setup using sensefly base station. Does pretty much what is describe and shown. Once I saw the possibility of using RS2 as a base station I tested it out.
I was able to connect and got it working, but not as I thought.
The sensefly base station allow to corrects the position of the images as it flies if you have a known point, otherwise if you lose RTK you basically PPK the position of the images through emotion after a post-process of the unknown point (either VRS or Post-process)
Attached the images of what I mean:
The base station allows me to use a known point to correct the images as it flies.
Ultimately both options work but it would be nice to know if this is a EMILD or eMotion issue and if there’s a work around. Because if it’s not able to use the EMLID as a base station, I don’t see the point in using it at all. The images will not be corrected and you only need a known point to PPK.
I would like to know what goes on in the background using the RS2 as a base station.
The work around is to set your base station’s position in other software or with a data collector. I use many brands of GPS base stations and assign the known point within the base stations’s own workflows. The senseFly Geobase is designed to allow eMotion to set the coordinates of the known point. Only certain base stations allow direct communications between emotion and the base station. It doesn’t matter if I set the known point within emotion or elsewhere. The end result is the same.
this is something that would interest our customer base also. Please feel free to comment again in this thread if you establish a fully documented workflow for using an RS2 as a base for a DJI P4Pro RTK or P4Pro Multispectral.
I currently refer users to the NTRIP header on this page: https://docs.emlid.com/reachrs2/reachview/base-mode/ however any step by step guide including the DJI software side would be a great way of boosting the confidence for our potential customers. If we ever get a P4Pro RTK/Multispectral we can do that, however we have no splans to acquire these aircraft at this point.
We have a DJI drone M300 RTK, we didn’t get the base station because we hoped the Reach RS2 could broadcast to the drone instead. I understand the drone can obtain corrections from NTRIP, but does that mean NTRIP only? Can I set-up the RS2 (base station) adjust some settings on the corrections and simply connect to the DJI M300 RTK? But, I think you are saying a NTRIP caster is the only way.