



14 Likes
I guess there should be an FW update soon, to integrate the antenna/reciever data to the ubx/rinex logging.

Remember, it only works if the north reference point was actually pointing north 
2 Likes
IMU provides the orientation to the north, without the need to point the antenna.
2 Likes
Really? I have not pointed any of my receivers to the north since I last used my Ashtech Locus receivers in the early 2000s.
1 Like
So I tested a 7-hour static observation file and compared the 2 PP results using NONE & Emlid RS2 antenna calibration data. Guess what? The difference in lat/long projected is less than 0.00001m and the difference in ht is 0.0002m.
Will the antenna calibration data be integrated into the onboard RTK computations?
2 Likes
Hi Juan, only in post-processing will you see the results of the antenna calibration. In Opus EML antenna is not available yet, do not try in other PPP services.
I think the effects are felt only in shorter observation times?
I know that there is a difference of several cm (<10cm) in using NONE & Sokkia GSR receivers. I tested it for one of our previous receivers. Well not really tested, it was an error in post processing when I failed to select the correct antenna file for the Sokkia and used the default NONE. When I again PP it using the correct Sokkia antenna, I found the differences in ht.
Excellent, do you know anything about the Reach RS +?
Hi @ojedajairo,
Reach RS+ is a single-frequency receiver. So, you only need the distance from the bottom of the unit to ARP. It might be considered as 65 mm.
1 Like
What is RSP file from RTKlib, usually when I convert proprietary data formats from other GNSS receivers to rinex, all I get is a .20O and .20p file which I think is the OBS file.
Still trying to figure out how to use RTKlib to post processing with confidence that I haven’t botched something or introduced an error.
What about when processing with a software like say Trimble Business Center…I am not sure there’s a way to add antenna information file.
Hi Tomisona,
As far as I know, the RSP file contains information for Stop-and-Go feature. However, I can’t say more since Reach doesn’t work with such a format, and I haven’t faced it in real life.
I can hardly comment on Trimble Business Center workflow, but did you follow our GPS post-processing guide? At which step you face difficulties? Probably, I could help you with that. I believe once you converted all input files to RINEX, there should be no difference in workflow.
As stated as requirements from the GPS post-processing guide,
would the Rinex from a reference station act as another base data to for a network or its just to correct the rover position independently?
Where and how can I get Ephemeris and Clock files for my observation Epoch from IGS, how do go about that?
1 Like
Hi Tomisona,
If I get you correctly, you mean network adjustment feature. RTKLib can’t do that. You can work only with one base and one rover at the same time.
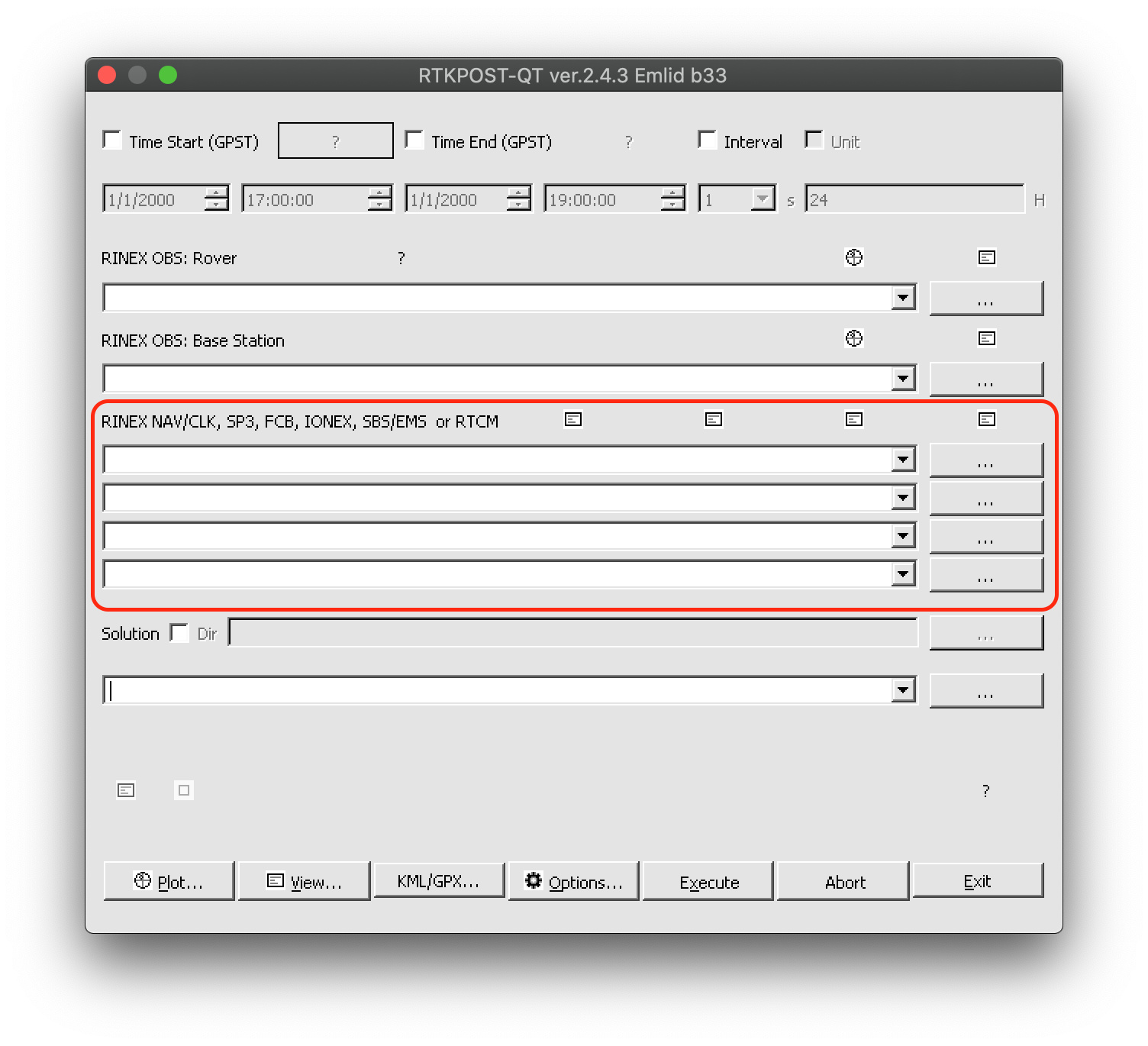
As far as I know, precise orbits and clock files can be downloaded from IGS. RTKPost has options for adding additional files for post-processing:
Hi support,
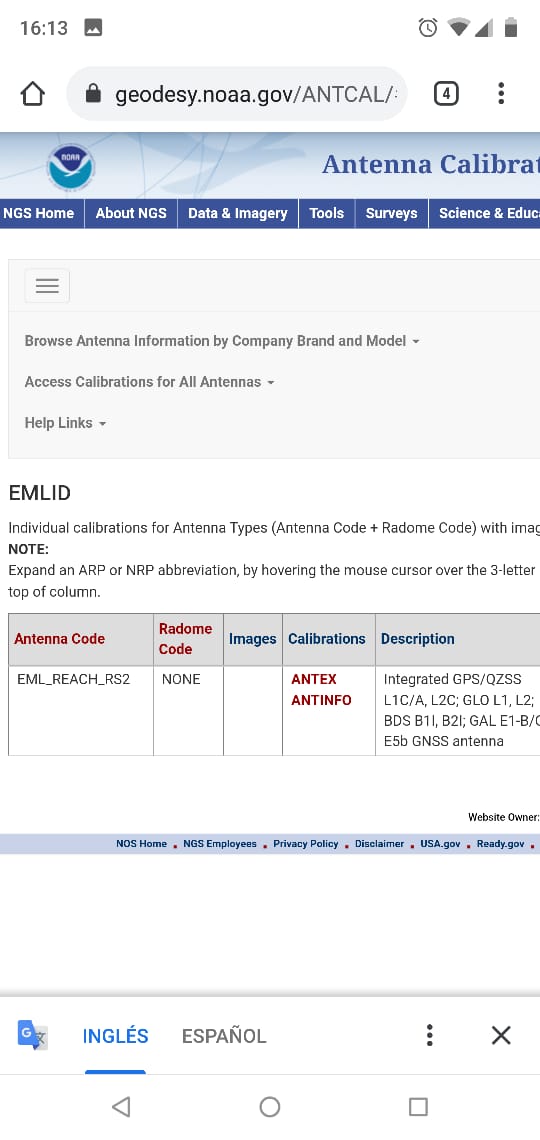
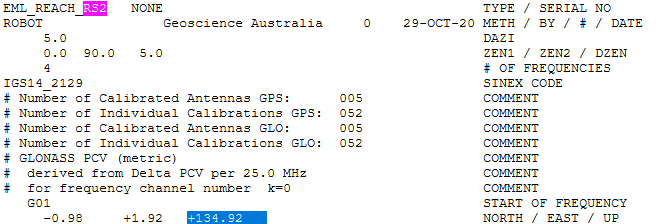
as NOAA has calibrated the RS2, it looks like the UP vector is rather 0.1349 m instead of 0.134 m that is given in EMLID Youtube video when one is setting up base mode ( = Placing The Base Over a Known Point).
Antenna Calibration Details at NOAA
what do you suggest then ?
should we rather use the UP value of NOAA ?
antoine
2 Likes
Hi Antoine,
These are just different values. 134 mm is a physical distance between the bottom of the receiver and the GNSS antenna. 134.92 mm is this distance plus antenna phase center.
For surveying, you can use 134 mm.
4 Likes
it is always better to use as ARP the base of antenna mount …
1 Like
Hello,
Is there any info on GLONASS L1/L2 Inter-frequencies receiver bias for the RS2 ?
1 Like
Hi @jorgelopez044,
Could you clarify where such info is required? Do you need this value in the software you work with? It will help me to provide you with the most relevant info.
1 Like