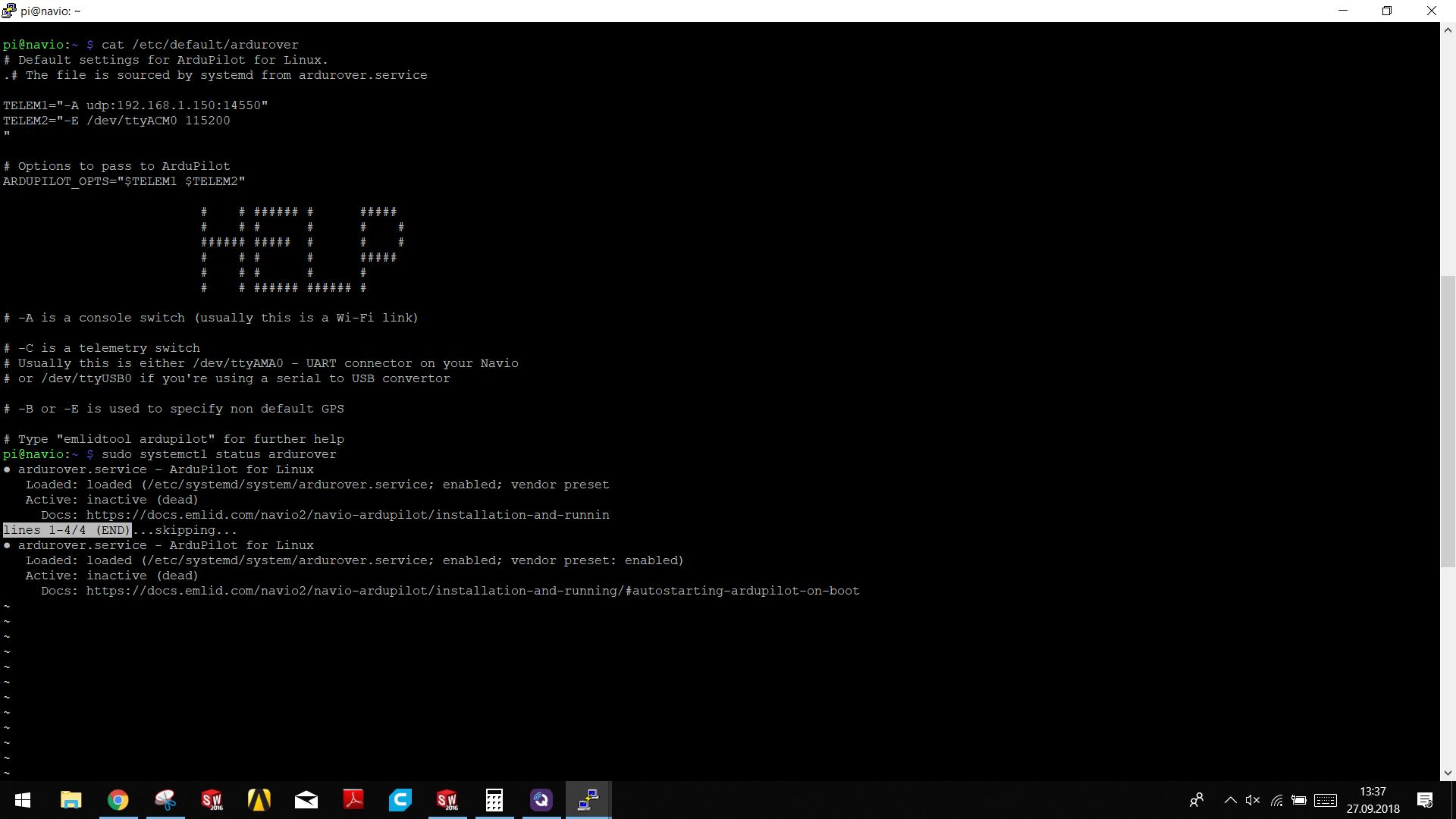
Please post the output of the next commands:
cat /etc/default/arduroversudo systemctl status ardurover
Please post the output of the next commands:
cat /etc/default/arduroversudo systemctl status arduroverAs I can see from the screenshot, you’ve specified all parameters for ardurover in the /etc/default/ardurover file. However, ardurover service isn’t running. Is it possible you started arducopter or arduplane instead of ardurover? Could you please change the setup to ardurover using sudo emlidtool ardupilot? Please post the screenshot of emlidtool after you’ll do it.
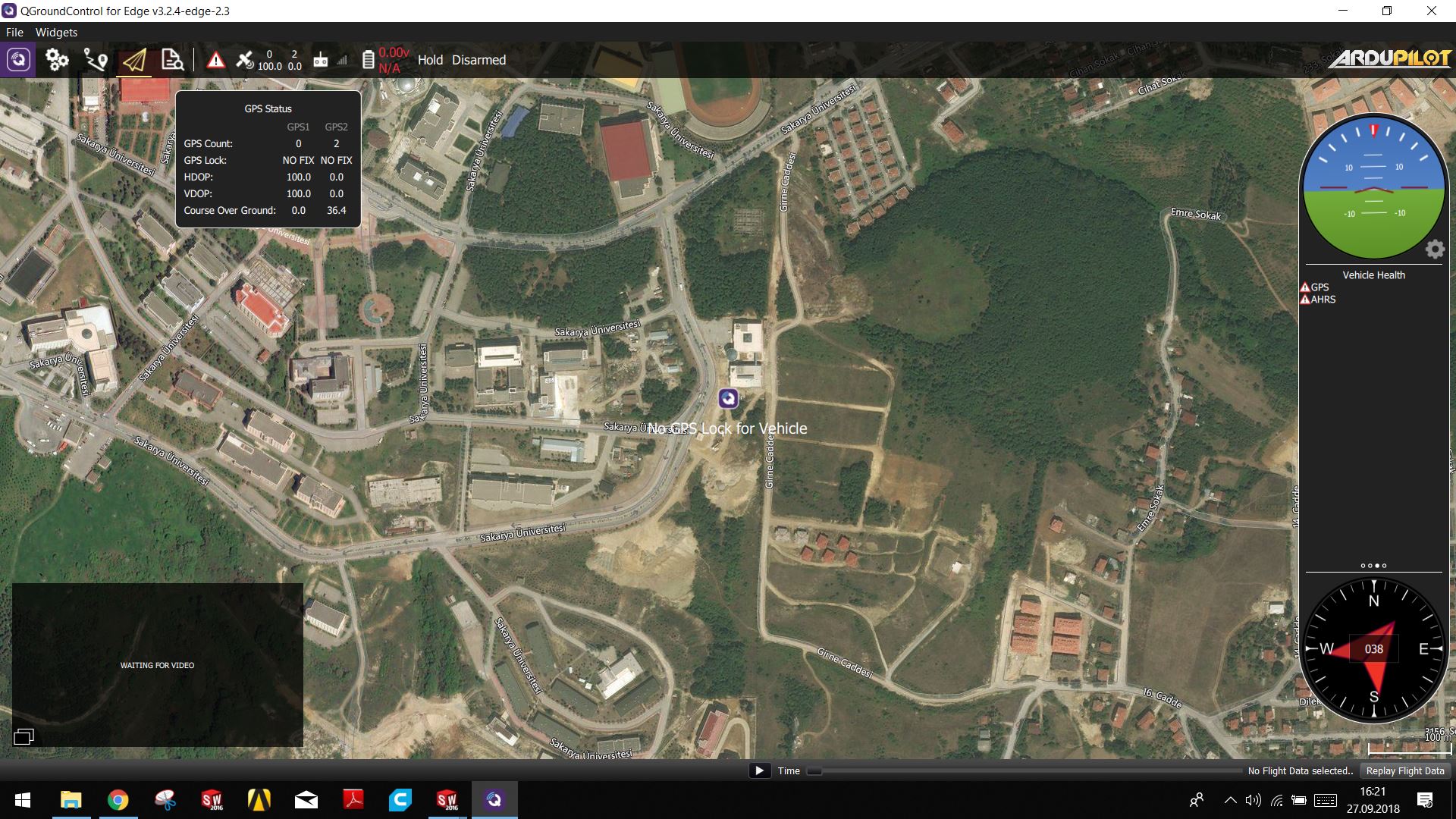
Ardu rover is runing and im connected with qgroundcontroller but systemctl say the ardurover not running.
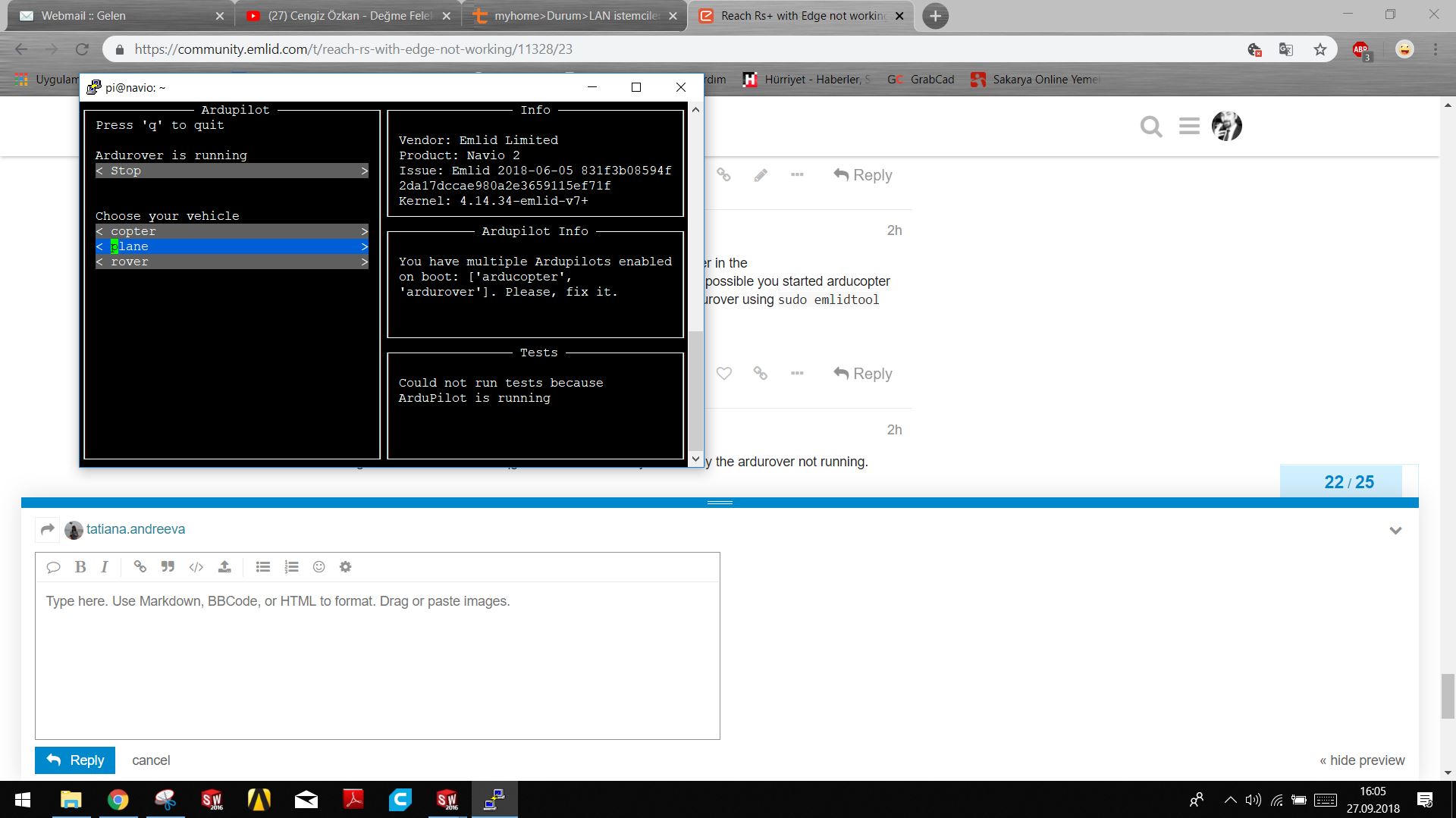
Please post the screenshot of emlidtool.
Now there are two enabled on boot ardupilots. Please run:
sudo systemctl disable arducoptersudo systemctl stop arducoptersudo systemctl restart arduroversudo systemctl status arduroverAnd share the output.
Thanks!
Okey now rs+ working the over navio2 thank you so much  @tatiana.andreeva
@tatiana.andreeva
Now second problem how work with edge ?
Third how can i use rtk with other rs+ via LoRa and output same the navio2 thats mean only rs working with navio2 with rtk dont using gps inject rtcm with ground controller
Hi @Akay_Yesiloz,
It’s good news!![]()
Here’s the description of base setup for ardupilot integration. You also will need to configure the rover correction input over USB-to-PC with the same baud rate (115200) and RTCM3 message format.
Use with any converter ? RS232 to TTL or directly connect DB9 port and JST-GH cable SER1-I2C
Please use the UART to RS232 converter to connect Reach RS to Edge SER-I2C port properly. The connector from your photos above should suit.
This topic was automatically closed 100 days after the last reply. New replies are no longer allowed.