Hi bide, thanks for your prompt response
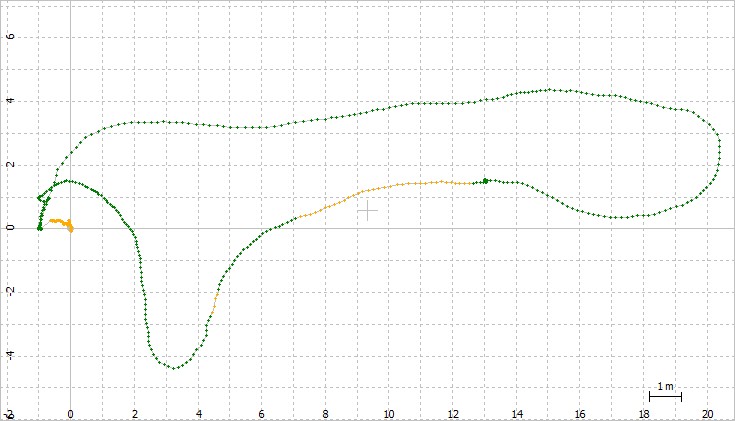
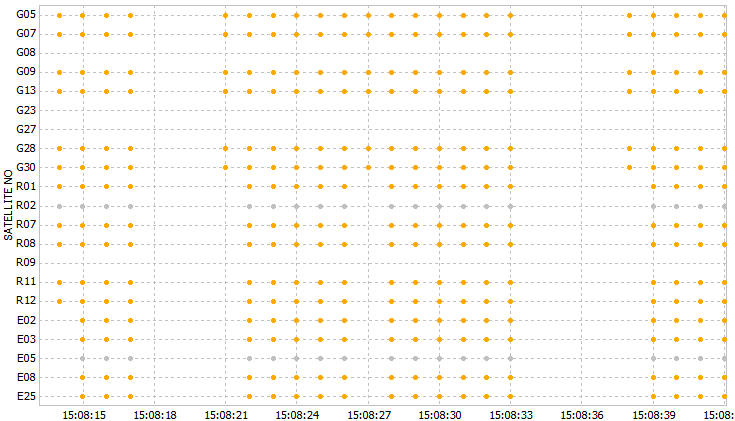
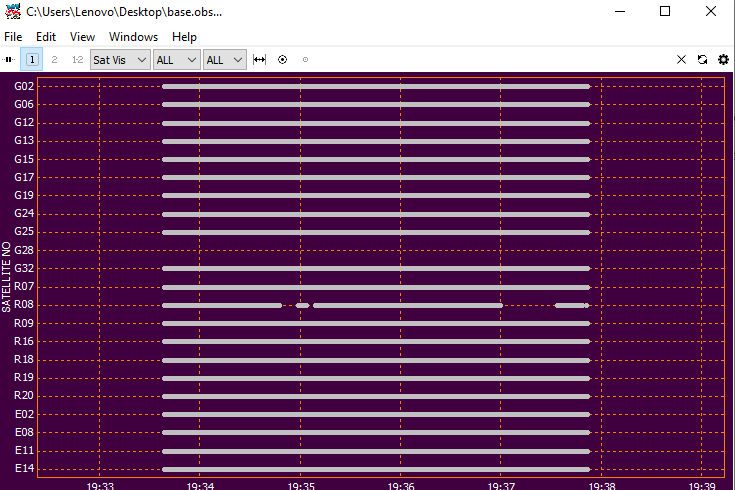
Yes, the gaps are consistent throughout the whole file.
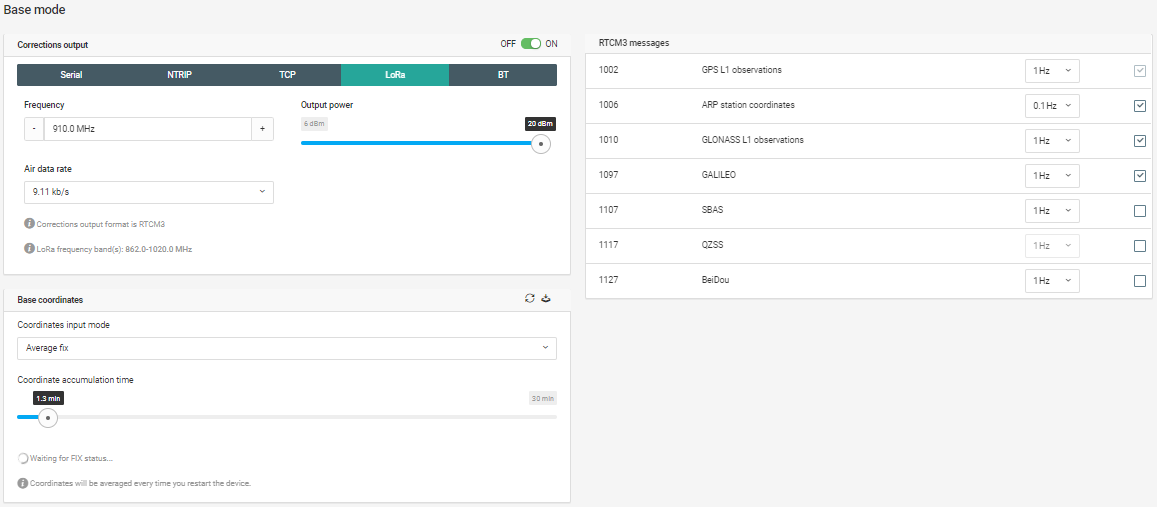
I just tried changing the air data rate to 18.23 kb/s and I’m still having this data loss in the LoRa communication between base and rover.
I attached the raw files related to the post in this comment since I couldn’t do it on the post itself.
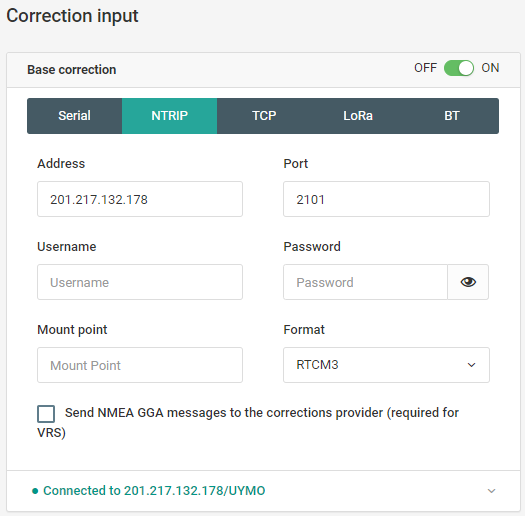
I think if you connected both devices to the same Wi-Fi network and set up the corrections throught a TCP port, then you could proove whether this issue is to do with LoRa or not.
Also confirm whether your rover is a Emlid unit or not.
So the issue must be in the radio link then. Could the gaps be due to electromagnetic interference? I make all my tests on the rooftop a few meters away from a bunch of antennas.
My rover is a raspberry pi running raspbian, getting the GNSS signals from a Neo-M8T receiver and getting the corrections via LoRa from a Reach M+ LoRa radio module: