I appreciate your assistance. I tried to include everything asked in order to get some help. If you need anything else, please let me know. Bear with me, I am new to surveying. We are getting started using drones for photogrammetry surveys.
Firmware image and ReachView version.
Reachview app version 7.6
firmware version 28.4, checked for updates.
Detailed problem description. How does observed behavior differ from the expected one?
I have tried and failed to set up one RS+ unit as a base, and another as a Rover. Specifically for the purpose of locating GCP’s for drone surveys. I have a proper surveying tripod for the base and a pole with bipod legs for the rover.
Your step by step actions.
I set up both the base and a rover as per the instructions in the guide. The rover is receiving corrections. I had it connected at one point for 50 minutes. I figure that if interference is an issue, I should at least get a float solution.
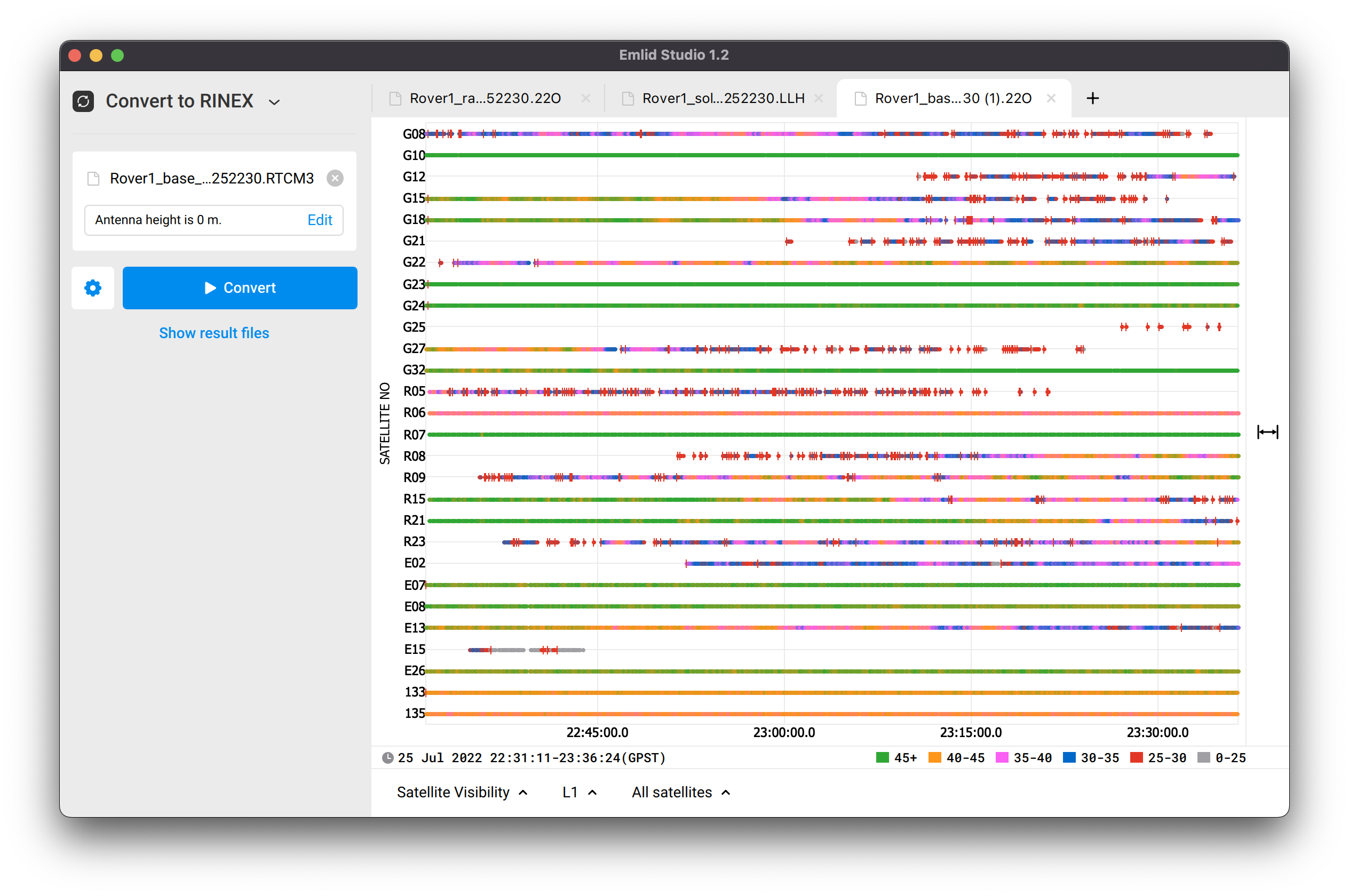
I took a look at the data. There seems to be a few issues:
Are you under or near a large tree? It seems so from Google Maps at least?
Dataquality isn’t great, and you generally have poorer data coming from below 40 degrees on the horizon. GNSS, and especially a single frequency receiver like the RS+, need and require clear skyview to get a good and reliable skyview.
Thank you for helping to point me in the right direction. There are some huge trees on my property. I was hoping the RS+ would work for our needs, but since we won’t always be in the open, we may need to spring for the more expensive RS2. I’ll give it a try in a very open field with no possible obstructions and see how that works.
Looking into Emlid’s ENTRIP caster. If we put a reach RS+ on the roof of our office, and cast via the internet, could we just use the Rover in the field (assuming cell signal is ok)? Would this help get around the issue? We would have a good clear sky on top of our office building, and it would never move.
Cycle slips appear when the sky view is obstructed or some interference sources are nearby the receiver. If the base has a poor data quality, the rover won’t calculate its position precisely. You can check our docs to learn how to place base properly.
Sure, it’s a really good idea! You only need to connect base to the Internet, and think about the power supply.
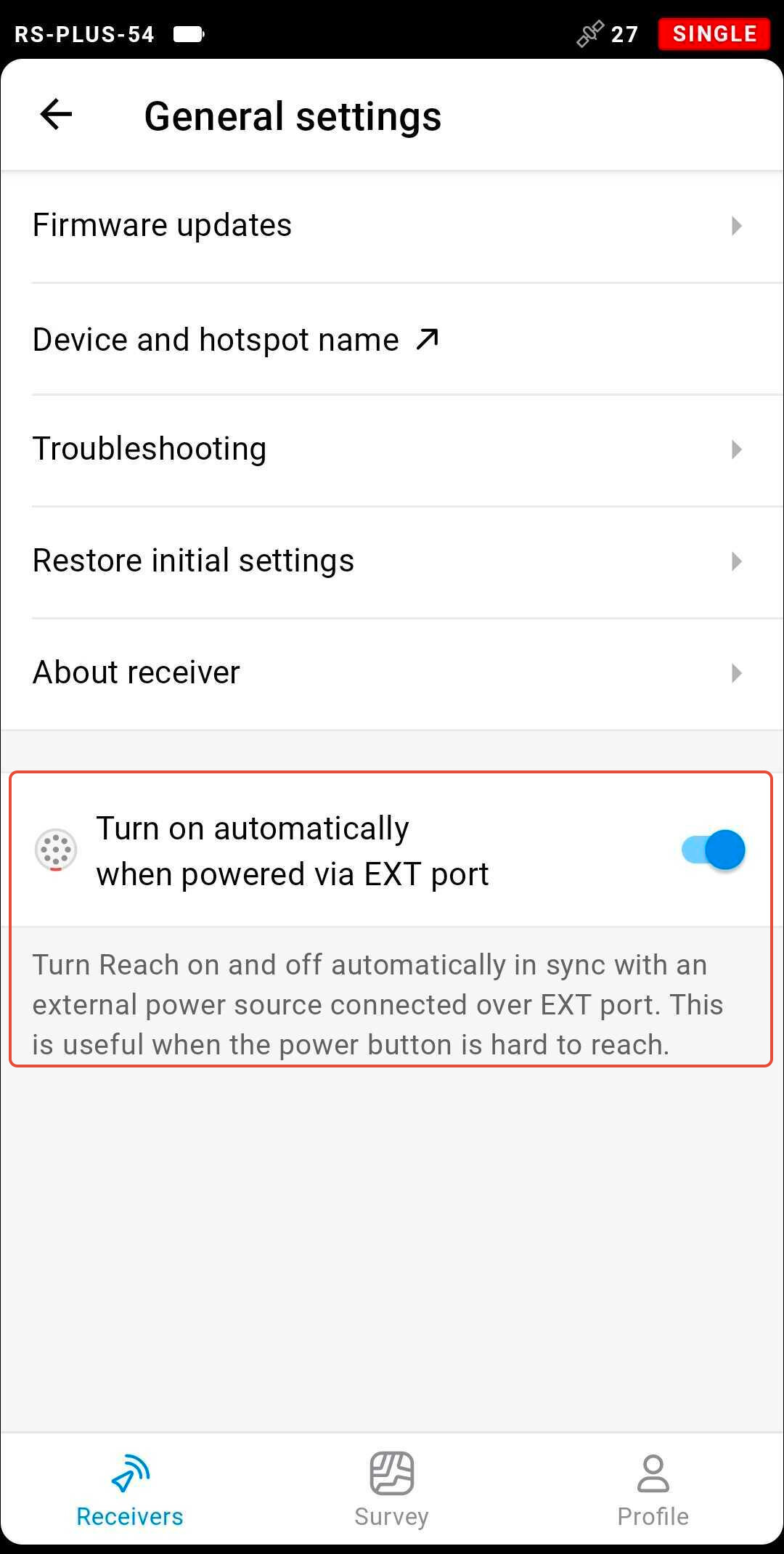
If it’s okay to get on the rooftop for turning on and off the device and charging, you can proceed with it. If it’s not convenient, it is possible to power Reach via 9-pin bottom connector with a voltage in the range from 5 V to 40 V. You can set up automatic turning on and off the receiver when it’s powered that way.
Thanks very much for the further reply and detailed information. I had a chance to try out the Reach RS+ with a very clear sky (on a beach) and a mostly clear sky (farm field) and I got a fix quickly both times. So, obviously we are set up properly. I’m going to try the Emlid cast over internet and see how that goes. In the meantime, hopefully we can gain confidence and get more drone work to justify the RS2, which I see most people using anyways.
Once you’ll be confident enough, please keep in mind that we no longer produce Reach RS2. It is replaced by Reach RS2+ that has LTE modem instead of 3.5G modem. Some dealers have Reach RS2 in stock for now, but I can hardly say how long it will last.