



Hi,
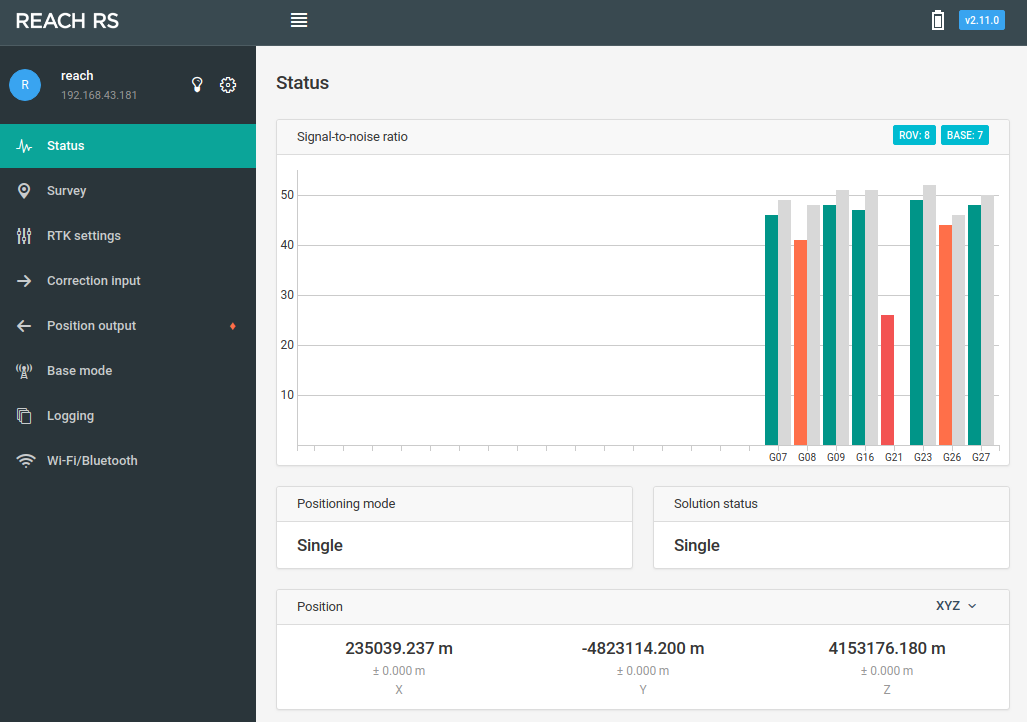
I have a Reach RS and it hasn’t been able to get into RTK mode.
We are running V2.11.0
Here is a link to the log files:
https://drive.google.com/open?id=1ZtkbLx4jh8QzTrnl-0mgi6lqmKpE-uai
System Report:
Simple system report
app version: 2.11.0-r0
'wifi_status, interface: wlan0':
- Client state
- IP address: 192.168.43.107
mac address: 90:b6:86:03:bb:9c
ssid: Kyler
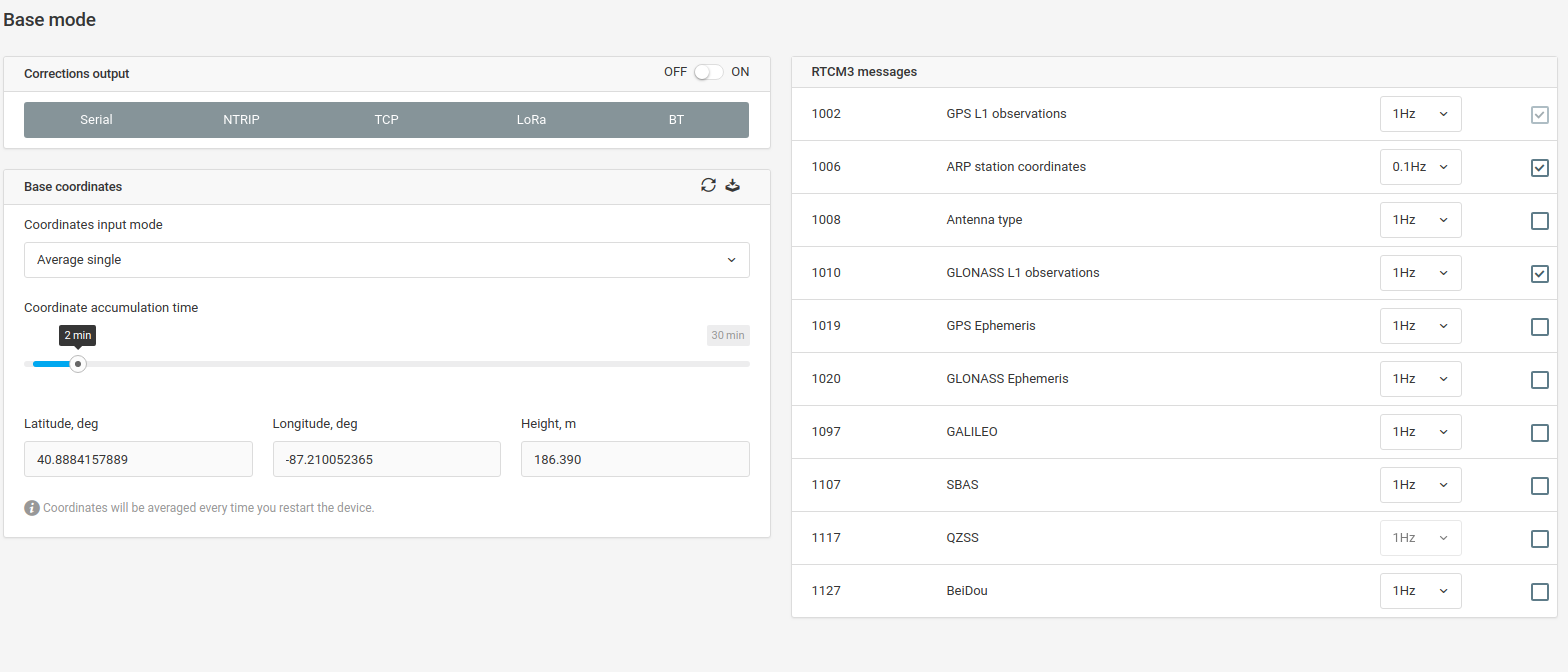
base mode:
base coordinates:
accumulation: '2'
antenna offset:
east: '0'
north: '0'
up: '0'
coordinates:
- '0'
- '0'
- '0'
format: llh
mode: single-and-hold
output:
enabled: false
format: rtcm3
path: tcpsvr://:9000#rtcm3
type: tcpsvr
rtcm3 messages:
'1002':
enabled: true
frequency: '1'
'1006':
enabled: true
frequency: '0.1'
'1008':
enabled: false
frequency: '1'
'1010':
enabled: true
frequency: '1'
'1019':
enabled: false
frequency: '1'
'1020':
enabled: false
frequency: '1'
'1097':
enabled: false
frequency: '1'
'1107':
enabled: false
frequency: '1'
'1117':
enabled: false
frequency: '1'
'1127':
enabled: false
frequency: '1'
gps:
enabled: false
frequency: '1'
qzss:
enabled: false
frequency: '1'
bluetooth:
discoverable: false
enabled: false
pin: '***'
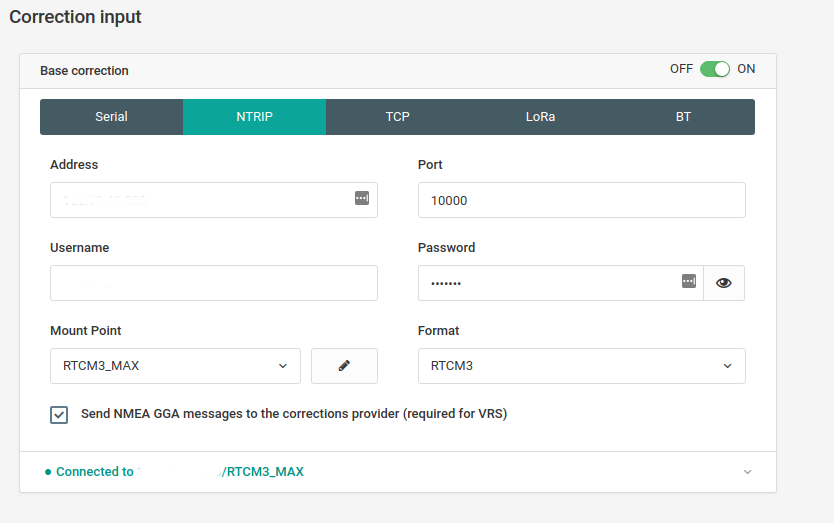
correction input:
input2:
enabled: true
format: rtcm3
path: '***:***@108.59.49.226:10000/RTCM3_MAX'
send position to base: single
type: ntripcli
input3:
enabled: false
format: rtcm3
path: :9028
type: tcpsvr
logging:
base:
format: RTCM3
started: false
version: null
correction:
format: RTCM3
started: false
version: null
interval: 86400
overwrite: true
raw:
format: UBX
started: false
version: null
solution:
format: NMEA
started: false
version: null
lora:
air rate: 2.6000000000000001
frequency: 868000
output power: 20
position output:
output1:
enabled: true
format: nmea
path: :9001
type: tcpsvr
output2:
enabled: true
format: nmea
path: :2013
type: tcpsvr
output3:
enabled: true
format: llh
path: :2014
type: tcpsvr
output4:
enabled: true
format: llh
path: :2015
type: tcpsvr
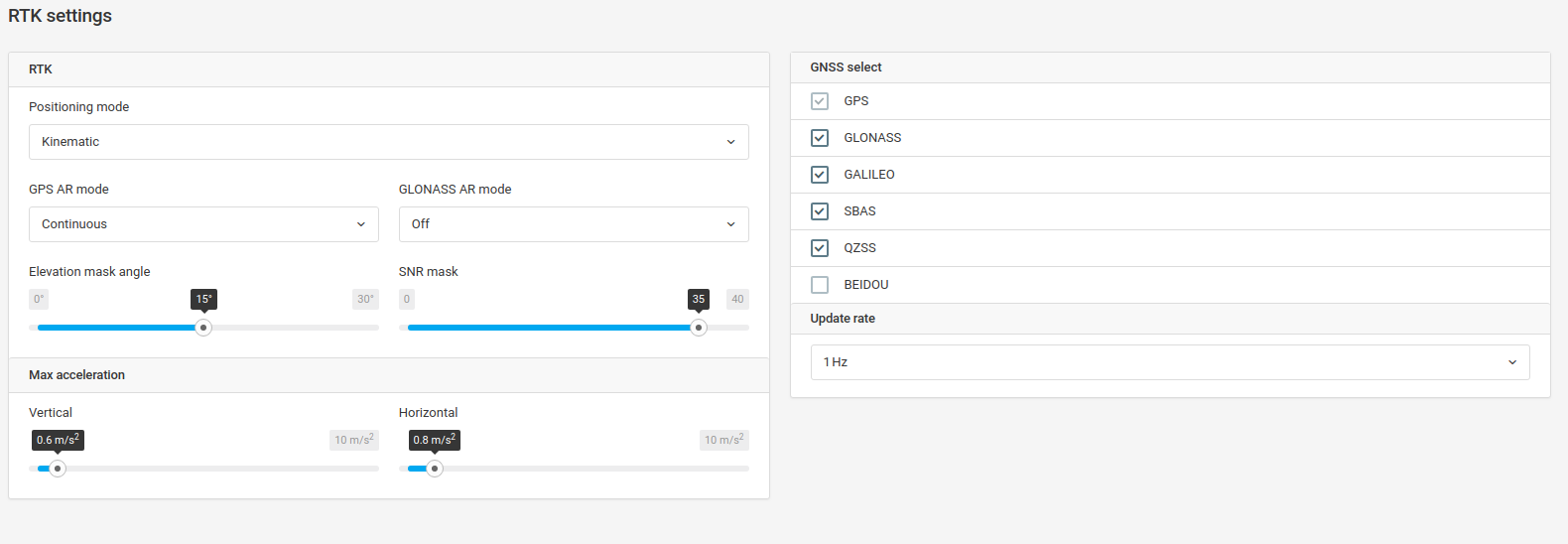
rtk settings:
elevation mask angle: '15'
glonass ar mode: 'off'
gps ar mode: continuous
max horizontal acceleration: '0.8'
max vertical acceleration: '0.6'
positioning mode: kinematic
positioning systems:
compass: false
galileo: true
glonass: true
gps: true
qzs: true
qzss: true
sbas: true
snr mask: '35'
update rate: '1'
Any ideas?
Thanks for your help,
Matt