Hi everyone, just a heads up / warning, I’m quite new when it comes to GPS, RTK, etc., so bare with me : )
This isn’t really an issue, but more so a question of setting things up correctly. Before I get into all that, here are some details about my setup:
- Base unit and rover unit are both Reach RS devices.
- ReachView app is version 2.10.0 for both units.
- A space about a half football field in size that’s free of buildings and other obstructions.
- Access to a nearby NTRIP (< 10km) station.
The problem I’m having, or really the expectation I have, is that the base unit would be able to obtain a FIX solution after setting its “Correction Input” to use the NTRIP station nearby, which would then enable me to set the base unit’s position (under “Base Mode” settings) to “Average Fix” instead of “Average Single.”
The goal is to be able to set accurate (sub meter) points in the field (e.g., for the base’s location, and for manually setting test waypoints) by having the base unit do an “Average Fix.”
The following are the settings for the base unit:
- RTK positioning mode: Static
- RTK GPS AR mode: Fix-and-hold
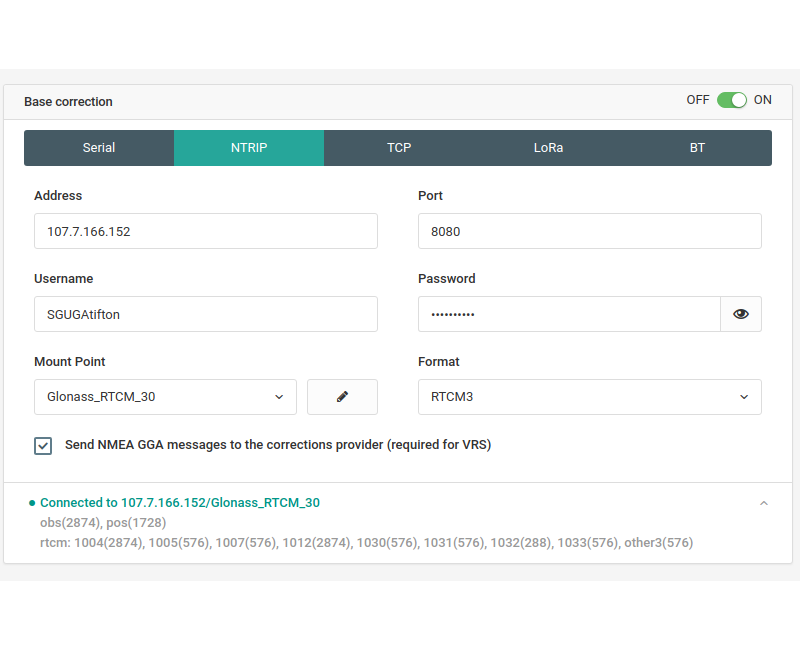
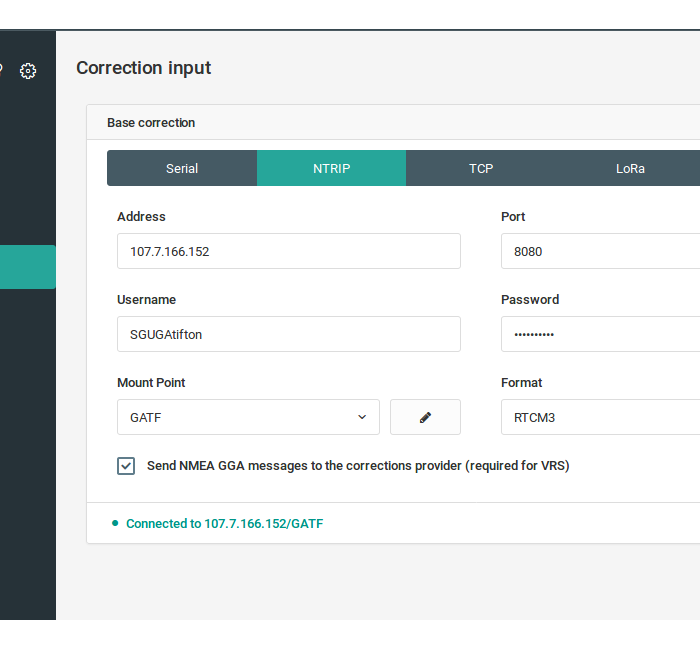
- Correction Input: NTRIP
- Base Mode corrections output: LoRa (sending to rover)
The following are the settings for the rover unit:
- RTK positioning mode: Kinematic
- RTK GPS AR mode: Fix-and-hold
- Correction Input: LoRa
I can provide any additional settings if they’re needed.
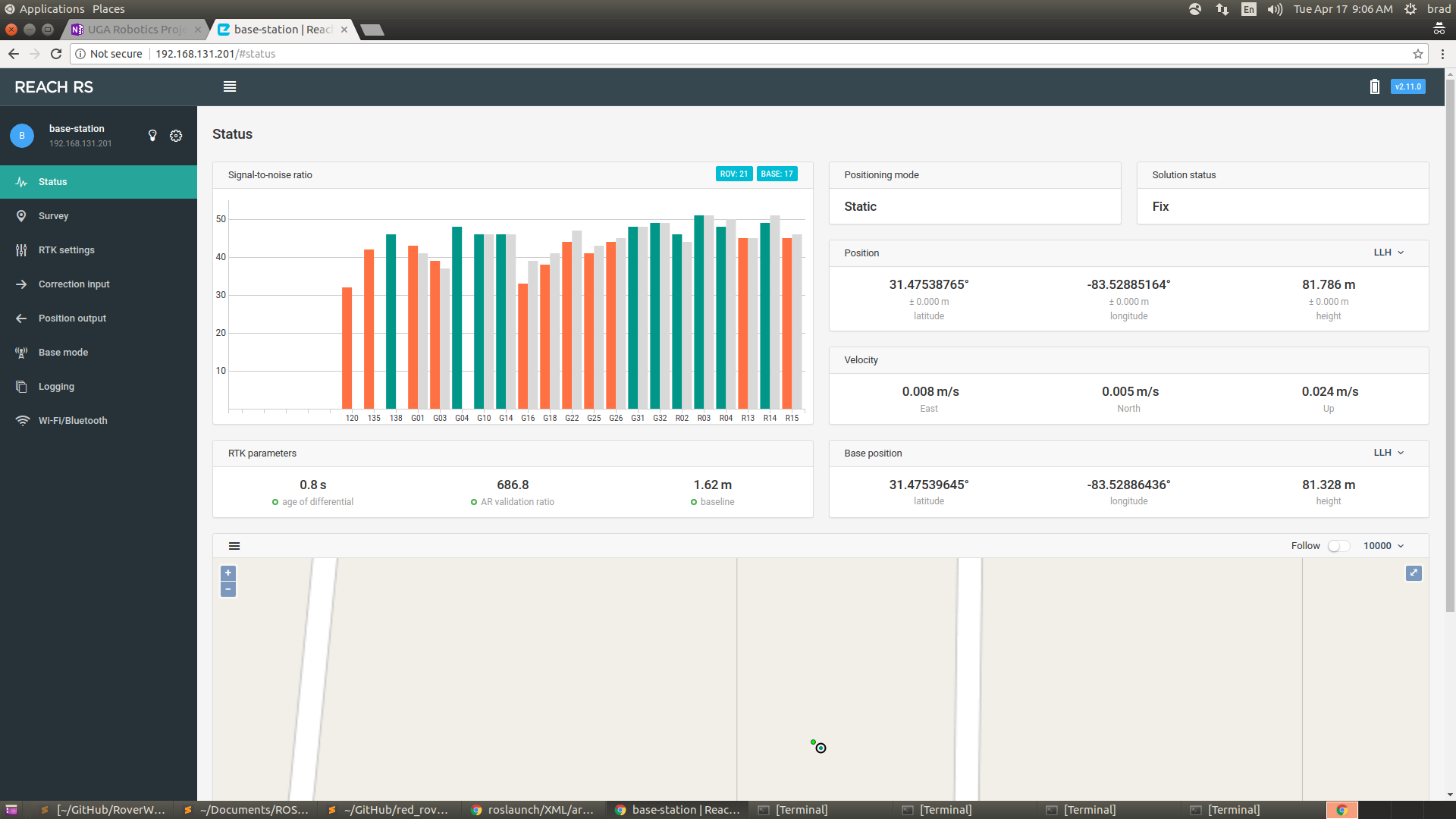
The behavior I’m seeing with this setup, is that after the base does an “Average Single” to determine its position, the rover gets a FIX solution after a few minutes, but the base unit is always in a Single solution state despite the correction input with the NTRIP station.
Is there something I’m setting incorrectly for integrating the NTRIP corrections into this setup?
Should the rover unit also be getting corrections from NTRIP and not from the base via LoRa?
Below is an image showing the base unit’s correction input with the NTRIP tower.
Any help is appreciated, and sorry if this isn’t in the write topic, or a duplicate, etc.
Nick