Good day
After many emails to Emlid support that was not answered I really hope that someone here will be able to help me.
I need to localize on a known point for stakeout work running Calson SurvCE Software.
For sone reason after setting up, Im only getting a attonomous reading and no fix. After spending the hole day trying to figure it out, am I now, so confused that I have no more Idea what the wright seput prosedure is.
Is there anybody out there that can please help me with the wright settings.
Im willing to pay for to your time.
Thank you very much in advance.
In case you are creating a thread about an issue please specify the appropriate sub-category first!
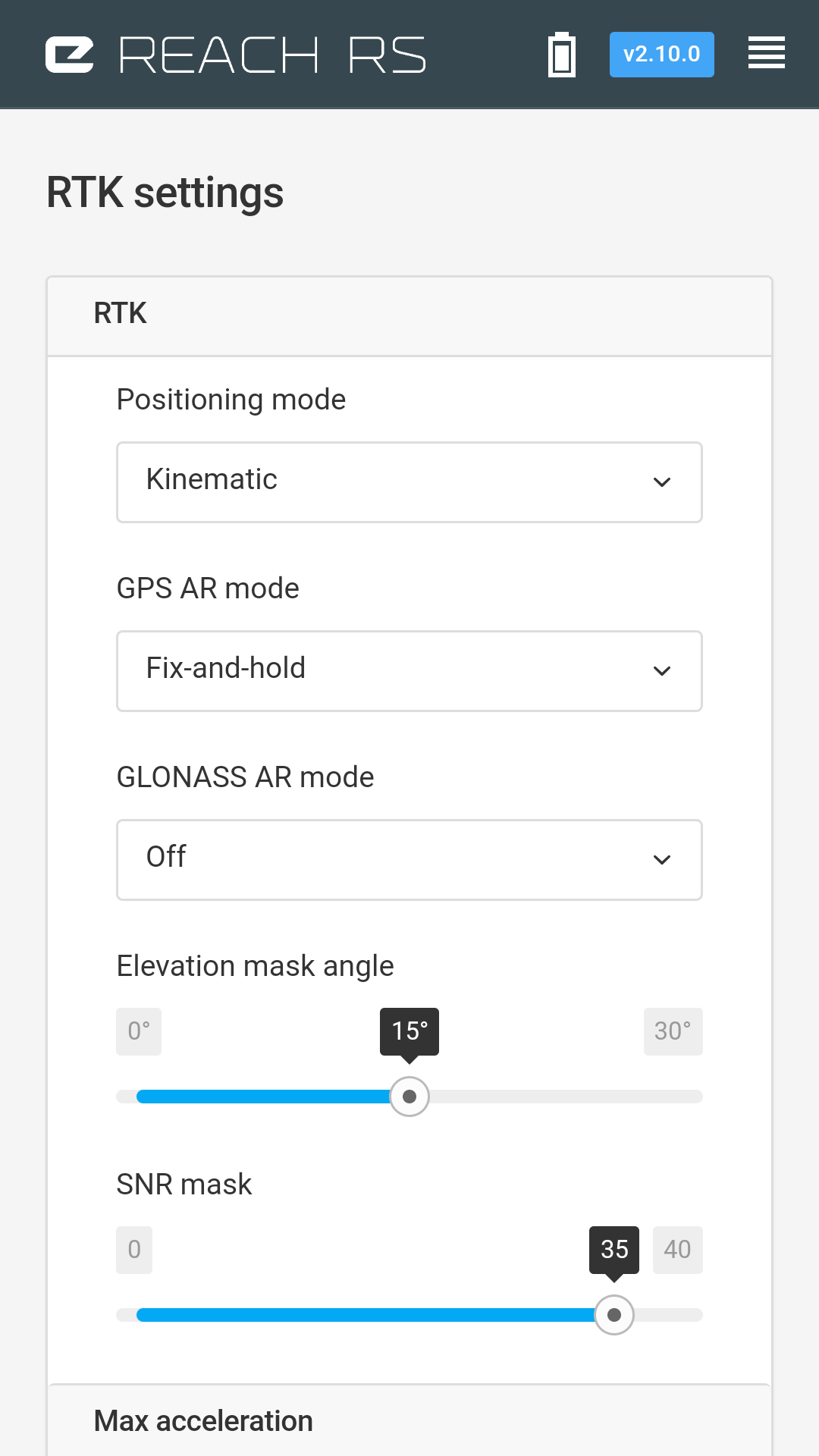
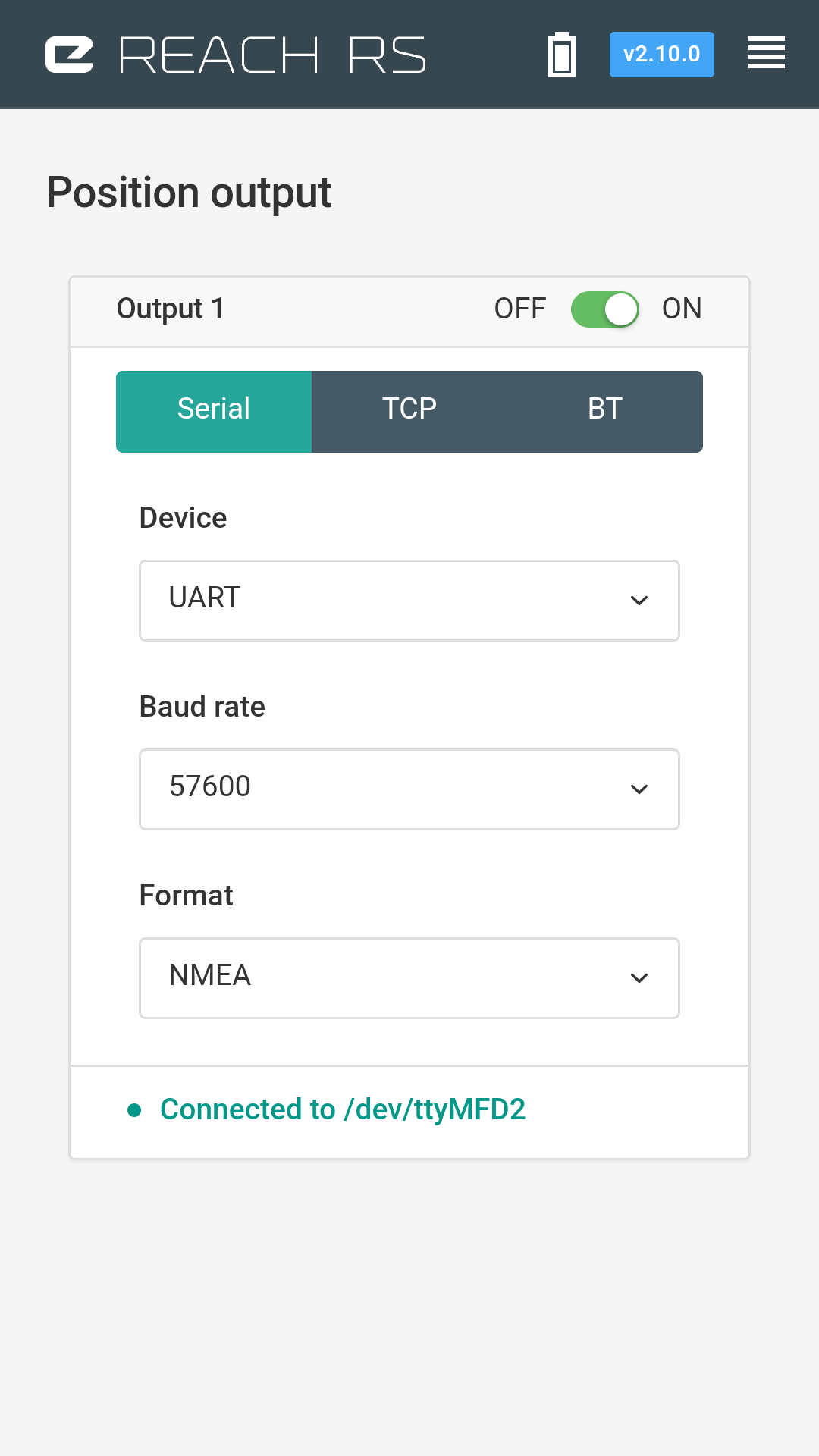
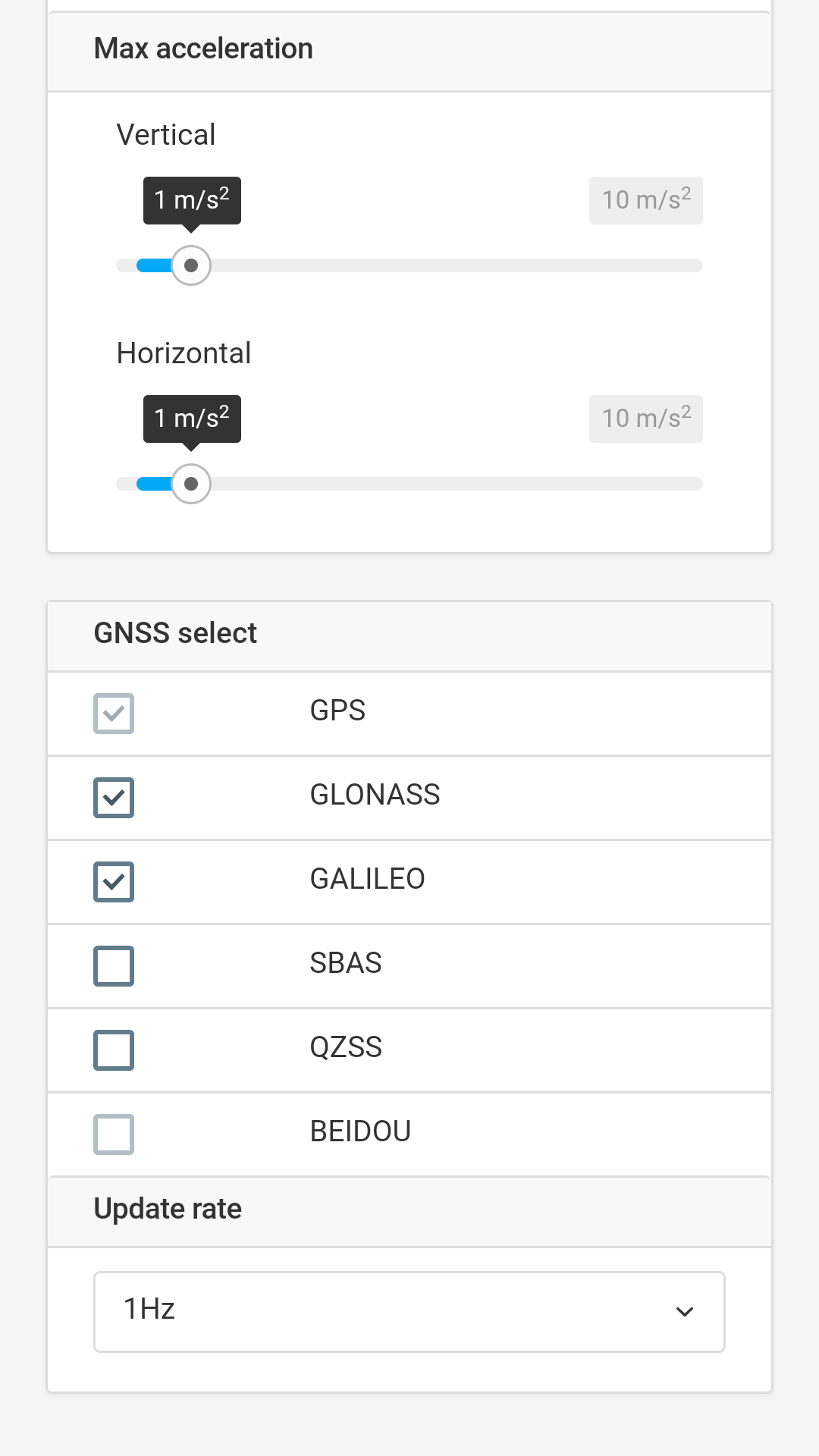
If you don’t mind, will you please take a look at the screenshots of my setup.
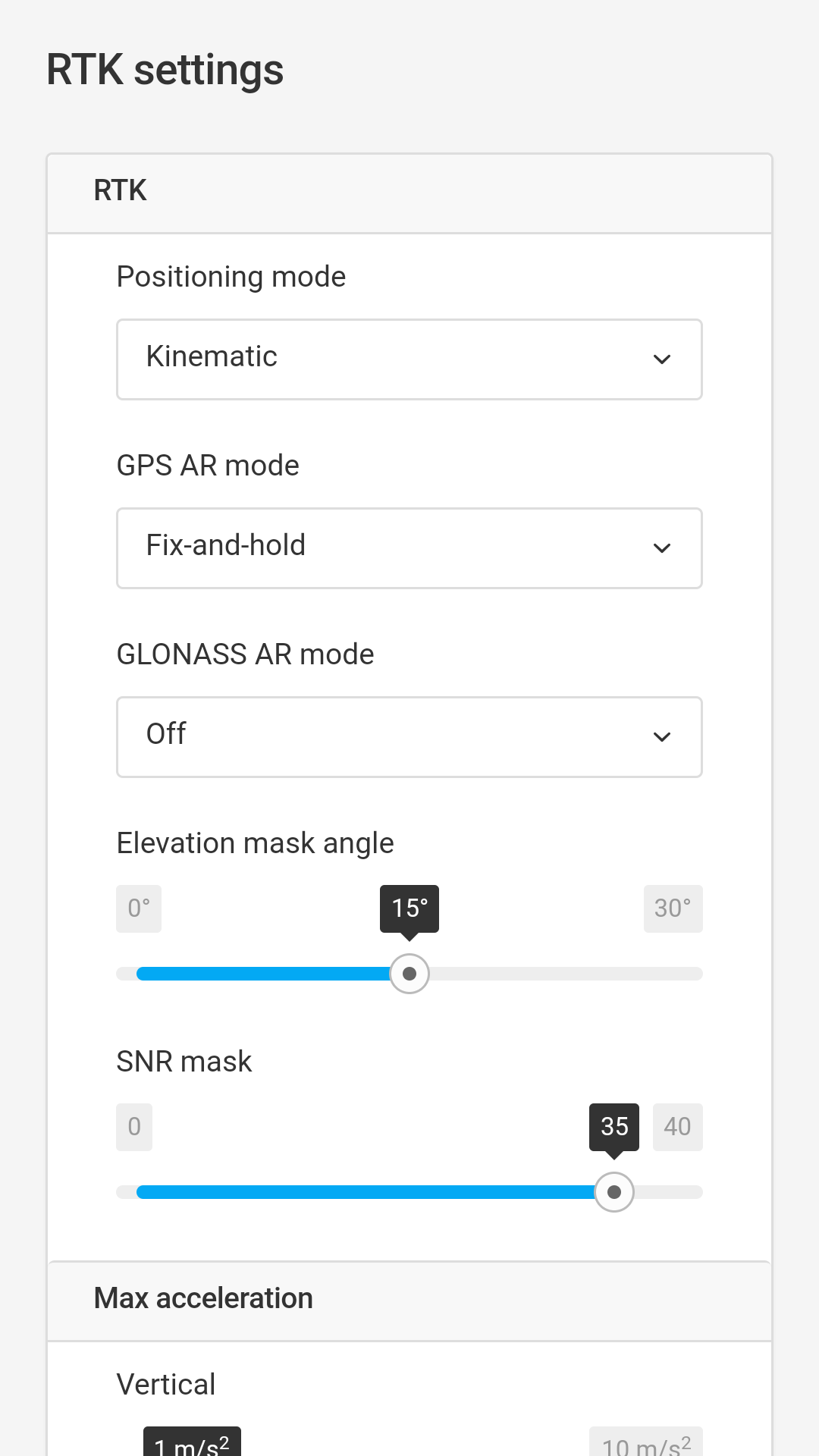
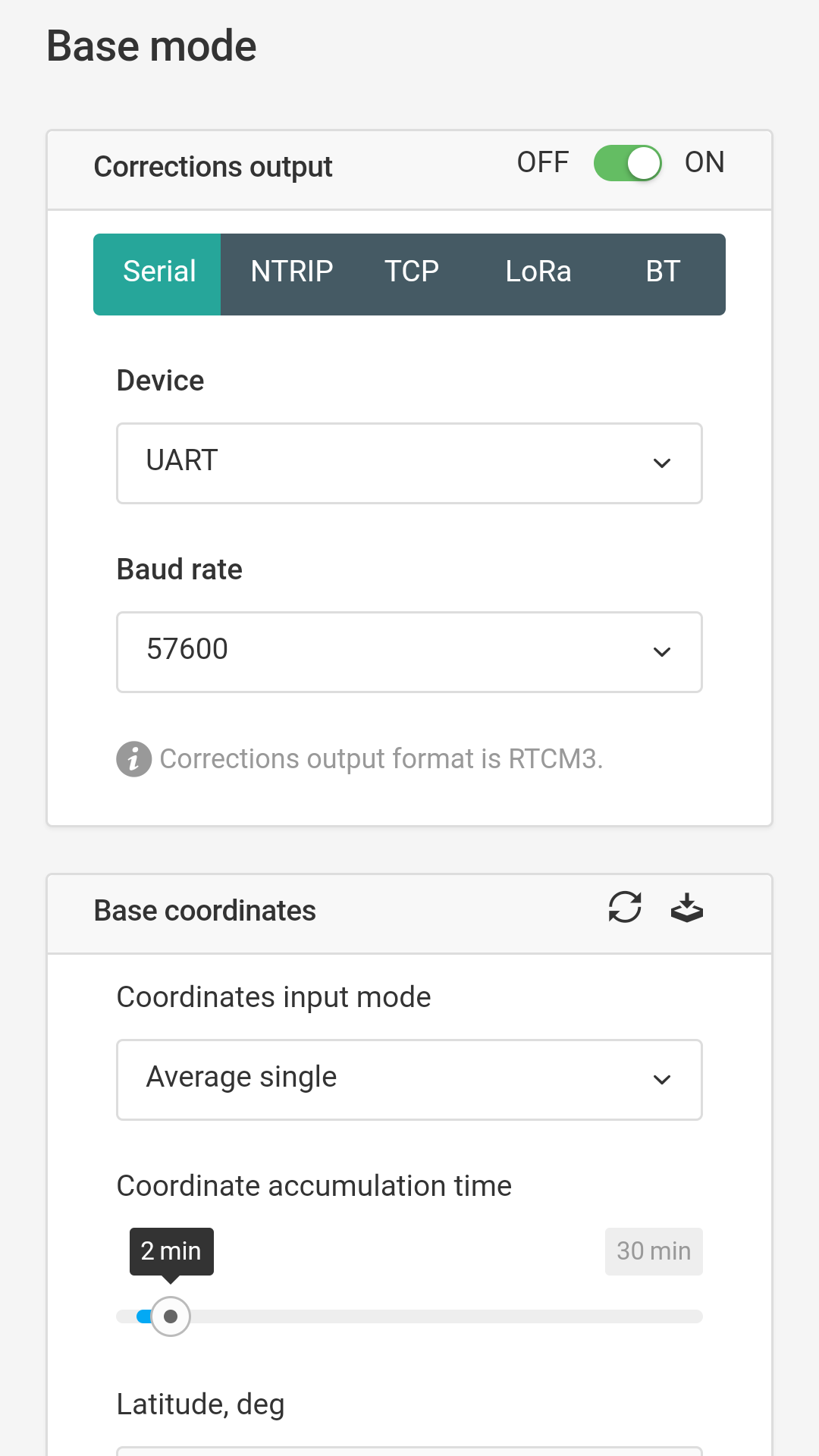
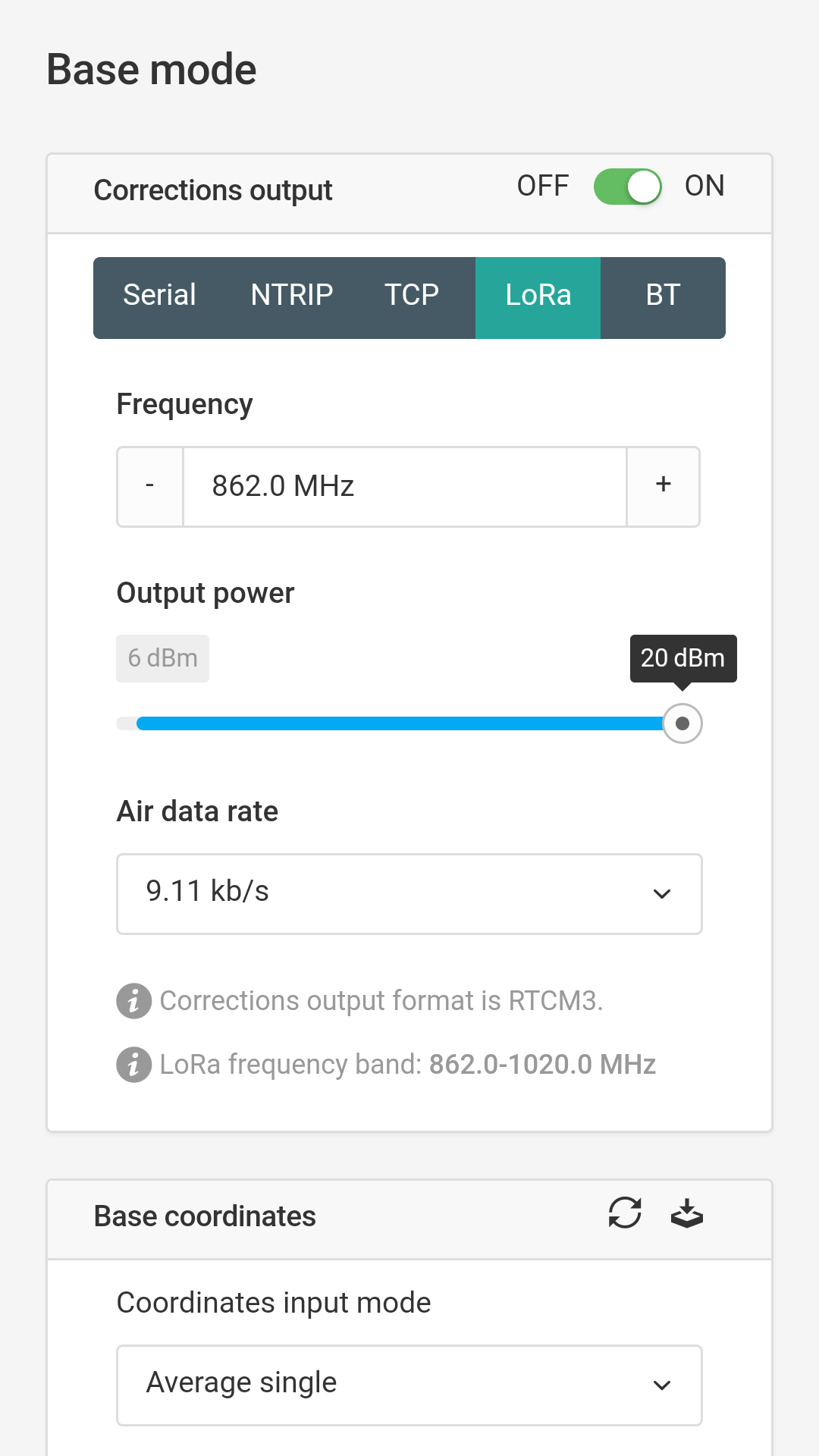
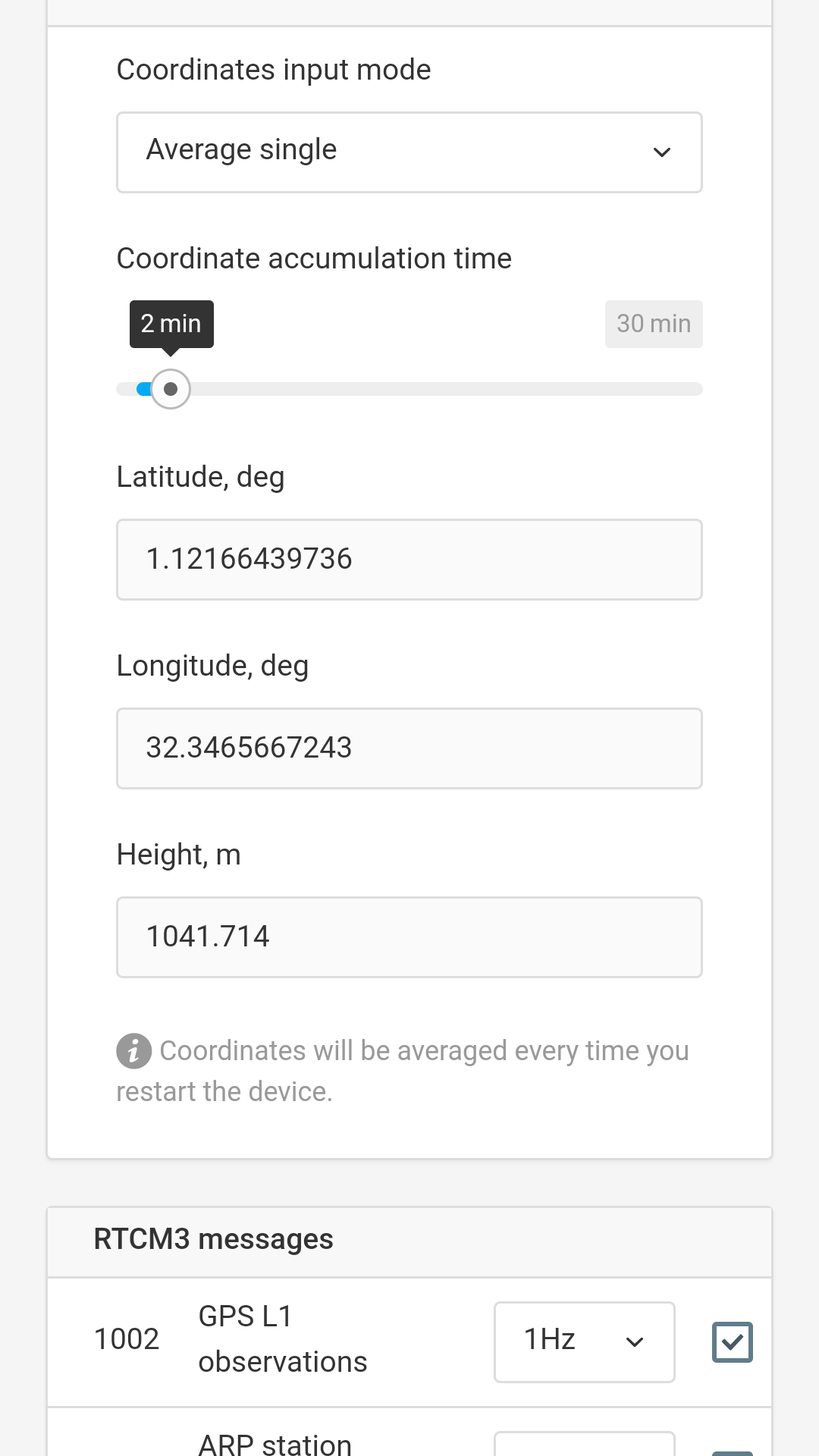
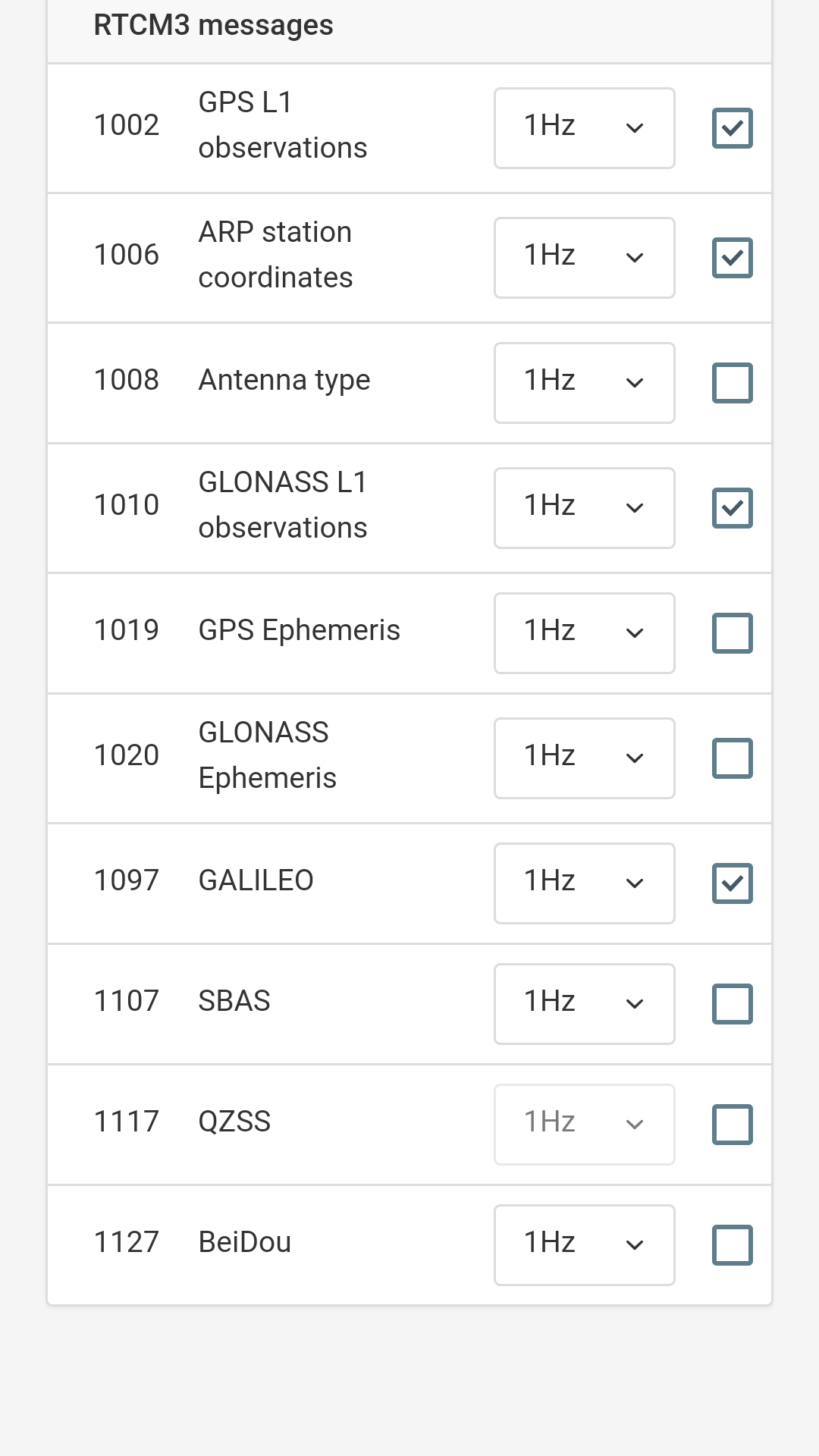
First set of photos is the Base setup. I am also struggling to understand the steps to localize on a known point seeing if I Work on Average Single it makes it very difficult to stakeout lines and points through Carlson SurveCE.
I have confused myself to such an extend that I don’t know what is right or wrong anymore.
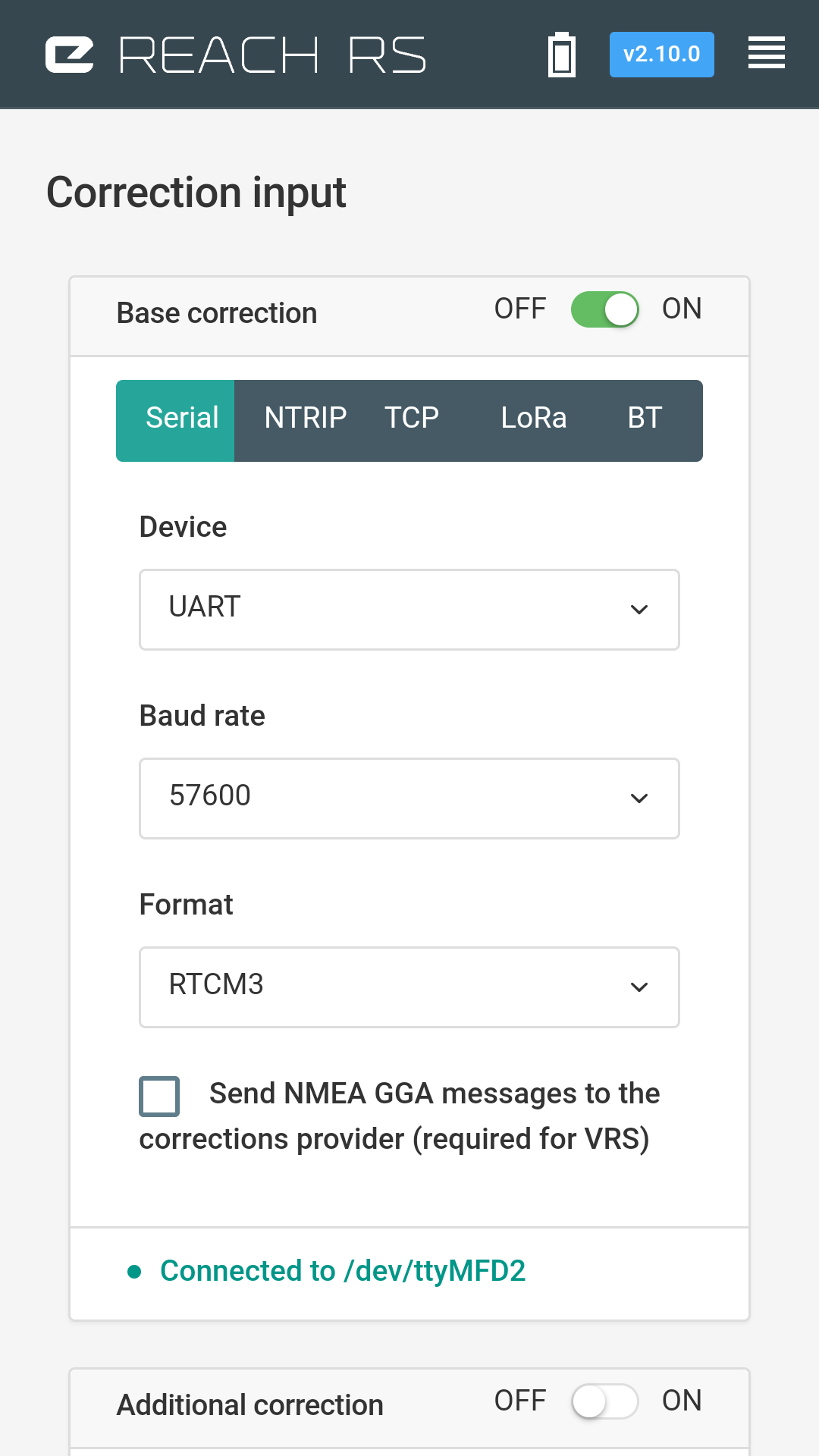
Well, your RS has fix and is working. You also have bluetooth on and connected to something.
1.What version of SurvCE are you running? From 5.06 it supports Emlid Reach RS
2.If above is ok, have you Reach RS to bluetooth connection on your datacollector?
Edit: Closing this one as you have duplicate thread open already