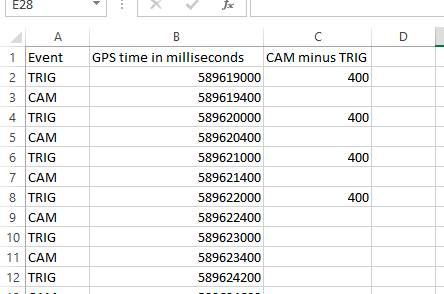
I’d like to add a Reach to my fixed wing for recording camera locations. How often does it refresh? My Pixhawk refreshes at 10 hz. The image below shows camera events recorded every tenth of a second. I’m using an M8N. So even if I solved GPS error, I would still have a 10th of a second error in UAV movement. How does the Reach handle this?
Camera events is stored in the raw file. When you enable .ubx logging on rover and when finished, download and process it according to this Doc section and you can retrive positions from the output log.
Emlid has custom buildt RTKconv and RTKpost to extract camera event, not sure this is done easier with other tools