Hi there,
I haven’t had that much time to work on the use of the Reach for navigation. I got the system up and running, and can demonstrate reasonable precision RTL and so on, but I have a number of slight issues with the installation and setup which at the moment make using it for auto missions less than ideal. You can watch a video of 3 RTL and landings with the RTK system in use, but I was only getting float rather than fix solution. Still a lot better than a regular GPS though.
Issues I will have to work through to get the system reliable enough to be useful for navigation in auto missions:
-
Ensuring the perfomance of the primary nav GPS - at the moment, I think due to the size and position of the Reach ground plane relative to the generic ebay M8N unit, I am getting degraded performance from this unit. I think the M8N is getting confused by multipath signals from the ground plane possibly. raising it up to the height of the ground plane ought to help.
-
Improving the quality of the Sik radio link - I am certainly not getting enough range from the connection to provide solid float/fix solutions throughout a 15-20 minute mapping mission. Switching in and out of float, and switching between GPS systems mid mission can be somewhat alarming, and leads to less than ideal coverage from the images collected.
-
Improving the signal strength and SNR of the Reach GPS signal. I’m not sure whether it is my less than ideal ground planes, insufficient view of sky, RF interference from the copter power systems or some other issue. Either way, in real time mode I struggle to get locked on to enough sats for a fix. Often the base and rover units will have 4 or 5 sats in the green, but they are not always the same ones. Numerous possibilities here, but I think improving the ground plane ought to help. So far I have tried:
70mmx80mm thin plastic with copper foil tape laminating both sides - Better than no ground plane, but not by much.
approx 200mm diamter 1mm think aluminium discs - Cut by hand so less than perfect circles, and slightly different sizes, so the tuning frequencies and so on may be slightly different? Currently using one on the rover and one on the ground station, best results so far with them. Surprisingly little difference in signal between the one mounted 4cm from the PDB and directly above the FC and associated electronics and the one mounted on a tripod well away from sources of RF interference.
100mm diameter aluminium disc - seemed to work OK on the ground station but was a few dB down on the 200mm disc when used on the rover. Made this after seeing the Tallysman recomendation on another thread to not exceed 100mm or so. Was hoping this would work on the rover as not so much of an issue for the other GPS.
In principle the system works well, but I would like to get the above issues resolved - I’m aware that my current setup is less than ideal, should be starting a new build soon that will be designed around the use of the Reach, but need a bit more data first.
The basic APM setup is working, but there are a lot of parameters for GPS systems which I think will need to be retuned to make optimal use of the precision of the system.
Finally I’m not sure that having two entirely different GPS systems on baord is a good idea. The M8N in particular often reports a very low HDOP (0.6) and 17-18 satellites, but the Reach unit is clearly giving a more solid solution, even in single mode. I’m not sure how the code handles switching between units under those circumstances, but I think this could be the source of some of the strange behaviour I have seen.
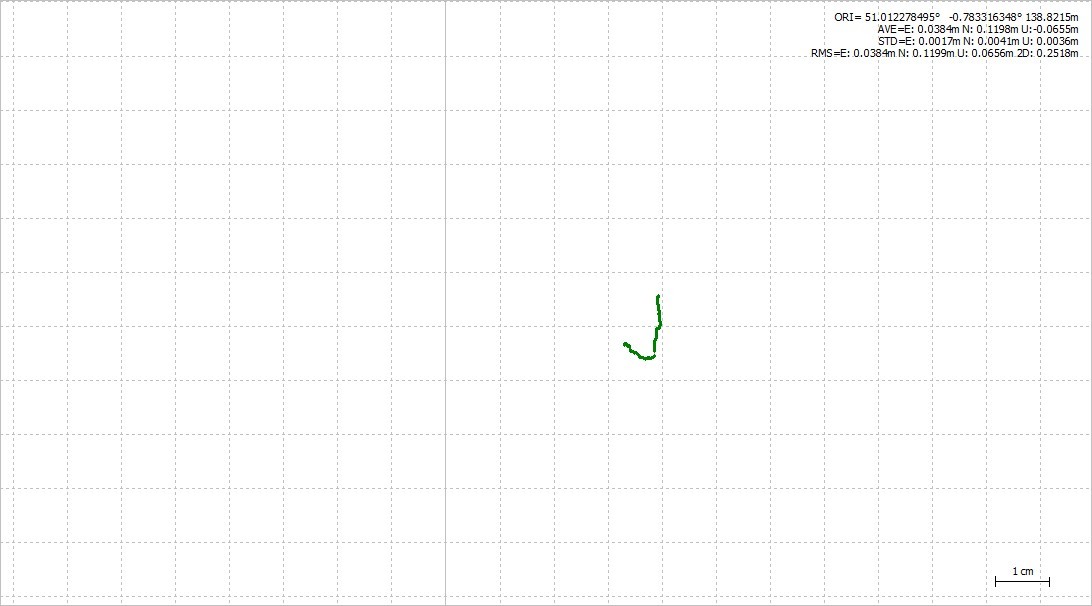
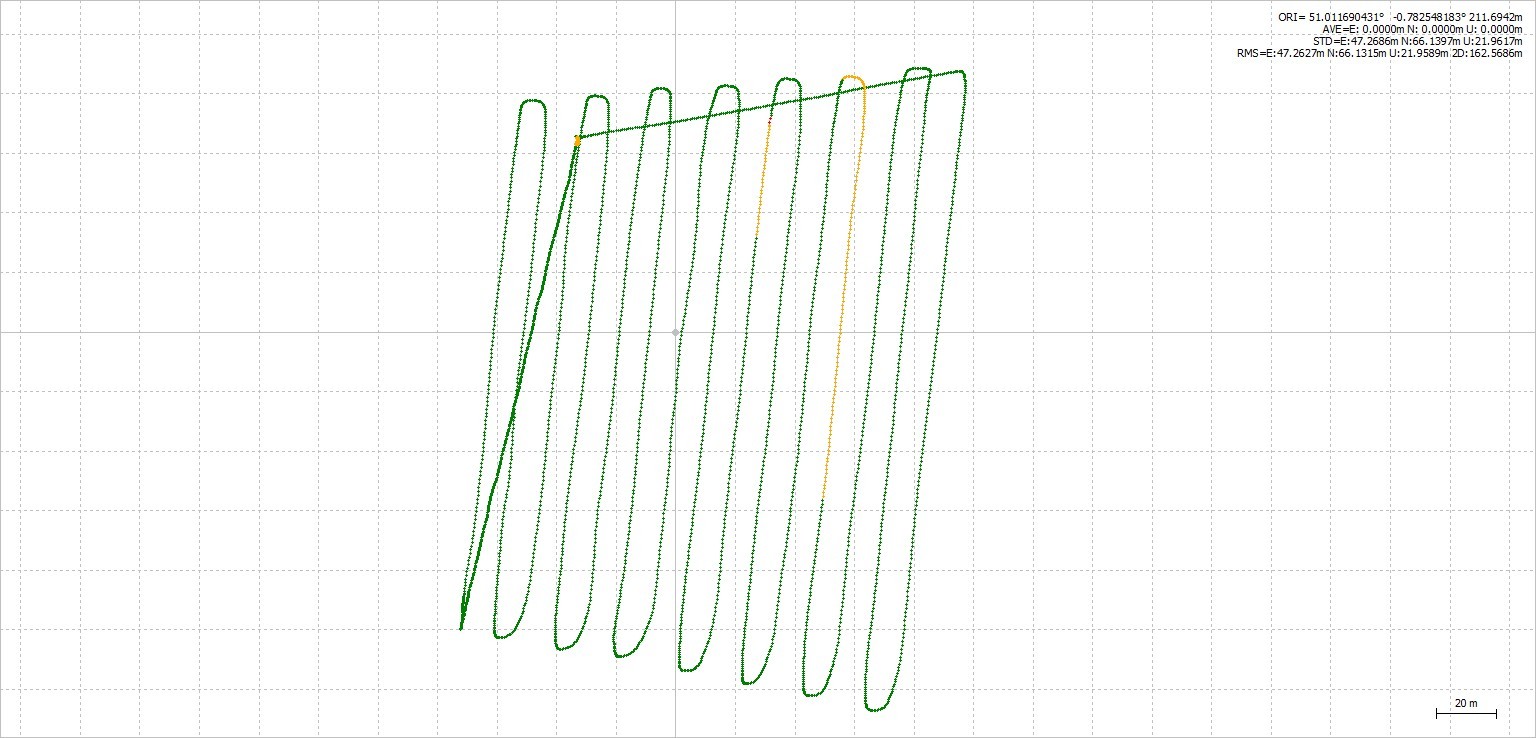
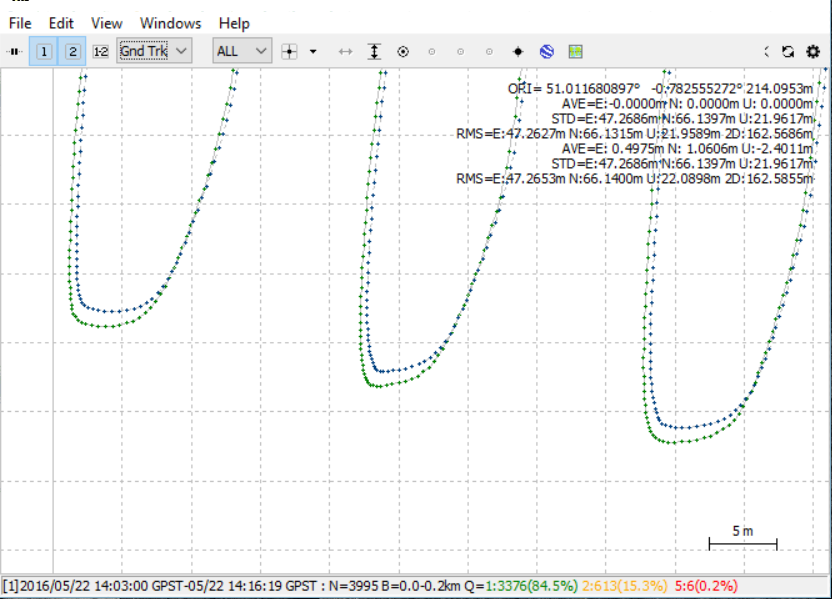
Using the system in single mode just for logging position for mapping and post processing the logs to use for geotagging works very well though!
Be very interested in other user reports and descriptions of their setups…couple of pictures of things as they currently are below.