i use Reach at the ground with virtual reference stations and NTRIP. It works great, fix in 5 minutes. At least in my country this is a good working solution.
Now i want to use reach for geotagging images with Navio2. Most people use a base station and radios for this szenario. Is this really required? I wonder if it’s possible to get the base correction data still via NTRIP over the internet (with a LTE-Stick at the copter?).
Has somebody tried this out?
Hi!
It’s great to know you have good results!
I think the easiest way would be to post-process Reach logs against the NTRIP service logs.
Hi @egor.fedorov.
I think @dirkkoller has a valid question. Post processsing is fine. But in some cases it is simple to just pull NTRIP corrections into reach. This setup would be simple. Reach unit on rover, lte modem connected to usb otg port. No need for a base station!
The capabilities are there for the solution to work. After all, you can run reach as a standalone gps unit on a network and get ntrip corrections and a solid fix.
The reach unit sees the lte modem (USB0, even gives it an IP address 192.168.2.15) so there must be a way to connect the reach to the internet through the lte modem plugged into usb0.
Perhaps, I’m way off mark here. Would be interesting to hear your thoughts.
Cheers
Forgot to say … loving the new image and reachview app!
just realised this will involved a change to the kernel to enable the usb to see the dongle as an ethernet device … so maybe not so simple
Hello Jason,
The new image has the necessary kernel modules(CDC_ETHER) to use the dongle. Basically you need to do two things:
- enable the new interface via
ifconfig interface_name up
- Get the IP address from this interface by running
udhcp -i interface_name
I might have made a mistake in the exact command syntax, but the idea is correct.
We are bringing this support to one of the following image updates, but you are free to try it out yourself, it’s fairly simple to do.
Hi Egor
I finally got this working, I can now use a standalone Reach unit getting NTRIP data via a 3G dongle connected to the edison usb port.
On the ground, everything worked well. Will test in the air soon.
Actually, I noticed something …
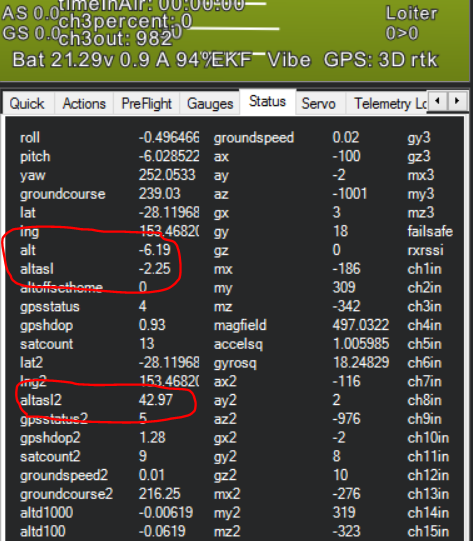
I am feeding the output of the reach position solution to my pixhawk (ERB output) via serial4 input into pixhawk. This works. I enabled GPS 2 (use default as the protocol). It picks it up well and shows the rtk solution.
What is concerning, is that the height from gps 1 (standard ublox m8n) and the reach is different. By a factor of 10! See screenshot.
I’m wondering if this is a mission planner error or ERB error. Analysis of the logs showed the same.
Regards
Jason