Hello,
I just bought a drone with Reach M2 installed and I’m having issues making it work.
I have the latest updates for it, the module is installed by the drone manufacturer and I don’t have access to it (or easy access…).
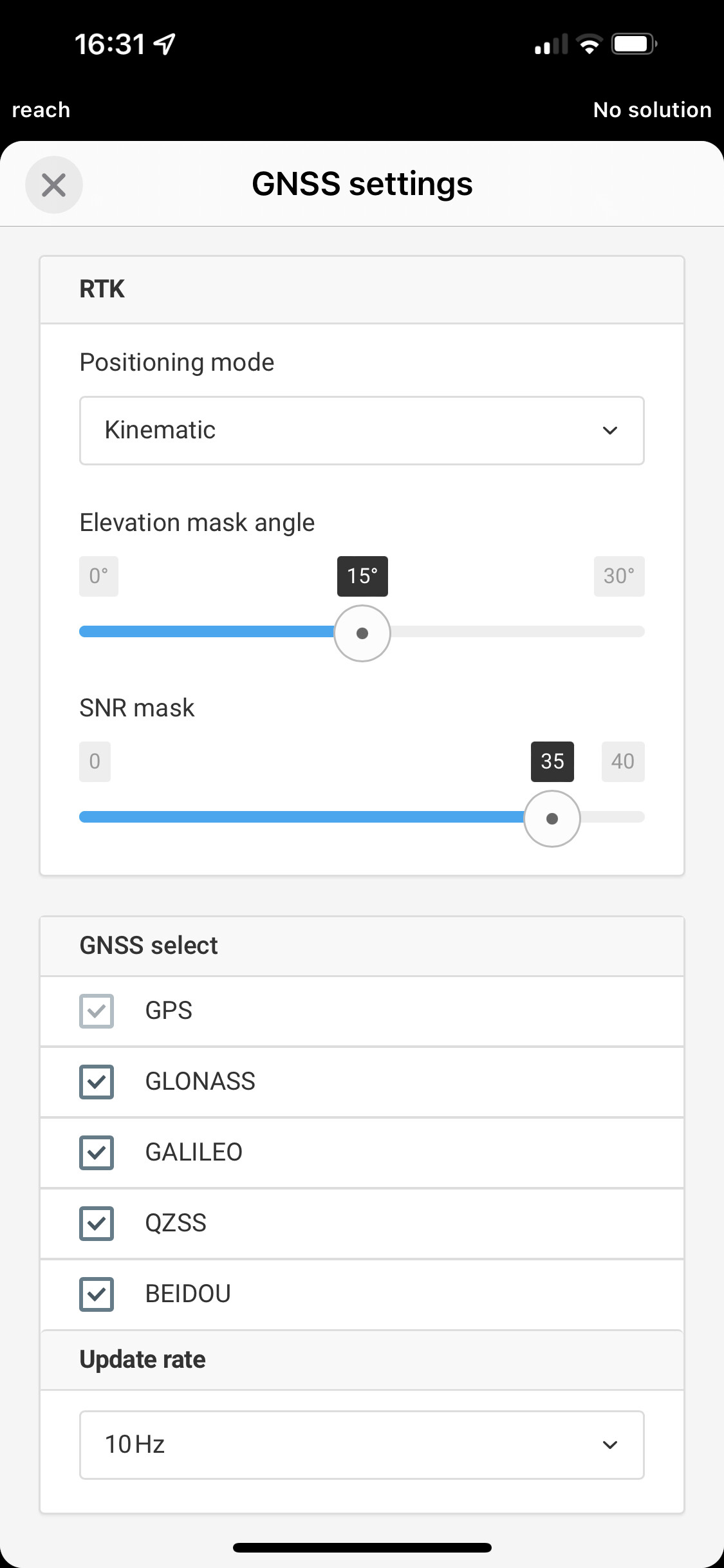
I’m using the M2 in kinematic mode as rover and I got another GPS as base in static mode (Stonex S900A).
Both GNSS devices were powered on at least 20 min before the flight.
Hot shoe is connected to the camera (Sony) and it’s controlled by the drone hardware.
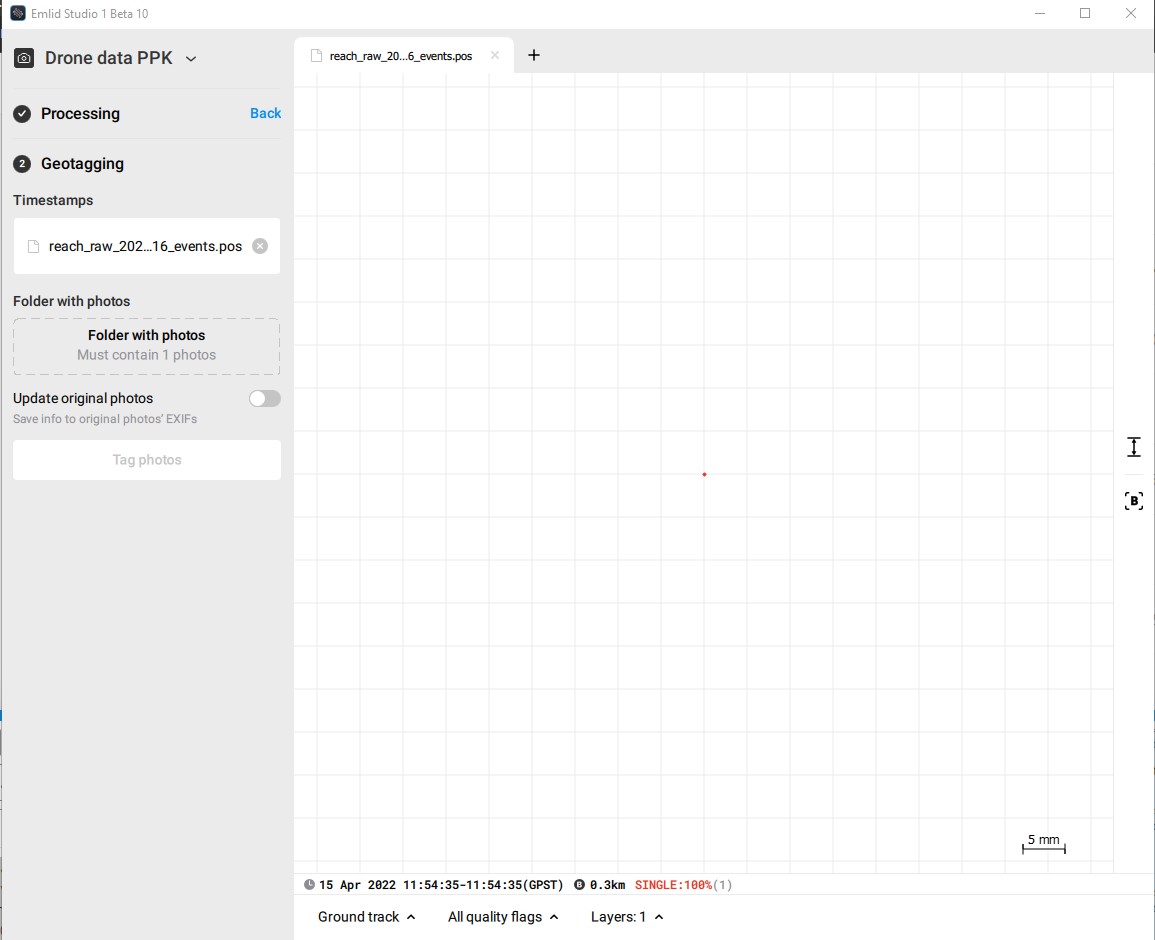
After trying to process the data using Emlid Studio, it tells me that my photo folder must contain 1 photo (and I had 371 photos taken). I’ve set Emlid Studio for Drone data PPK-Kinematic, and selected the .ubx file for rover and .o file (rinex) for base, and entered the coordinates manually.
Maybe I missed some settings that I wasn’t aware of, but cannot figure out which ones.
Cannot upload files here, but I uploaded them to cloud.Report and gps data
Anyone got any ideas what’s wrong?
I’ve checked the data you shared. The rover’s log contains 371 time marks, but for some reason, all of them are invalid. So Emlid Studio can’t use them in post-processing. Invalid time marks are a pretty rare issue. Usually, they are caused by the hardware setup.
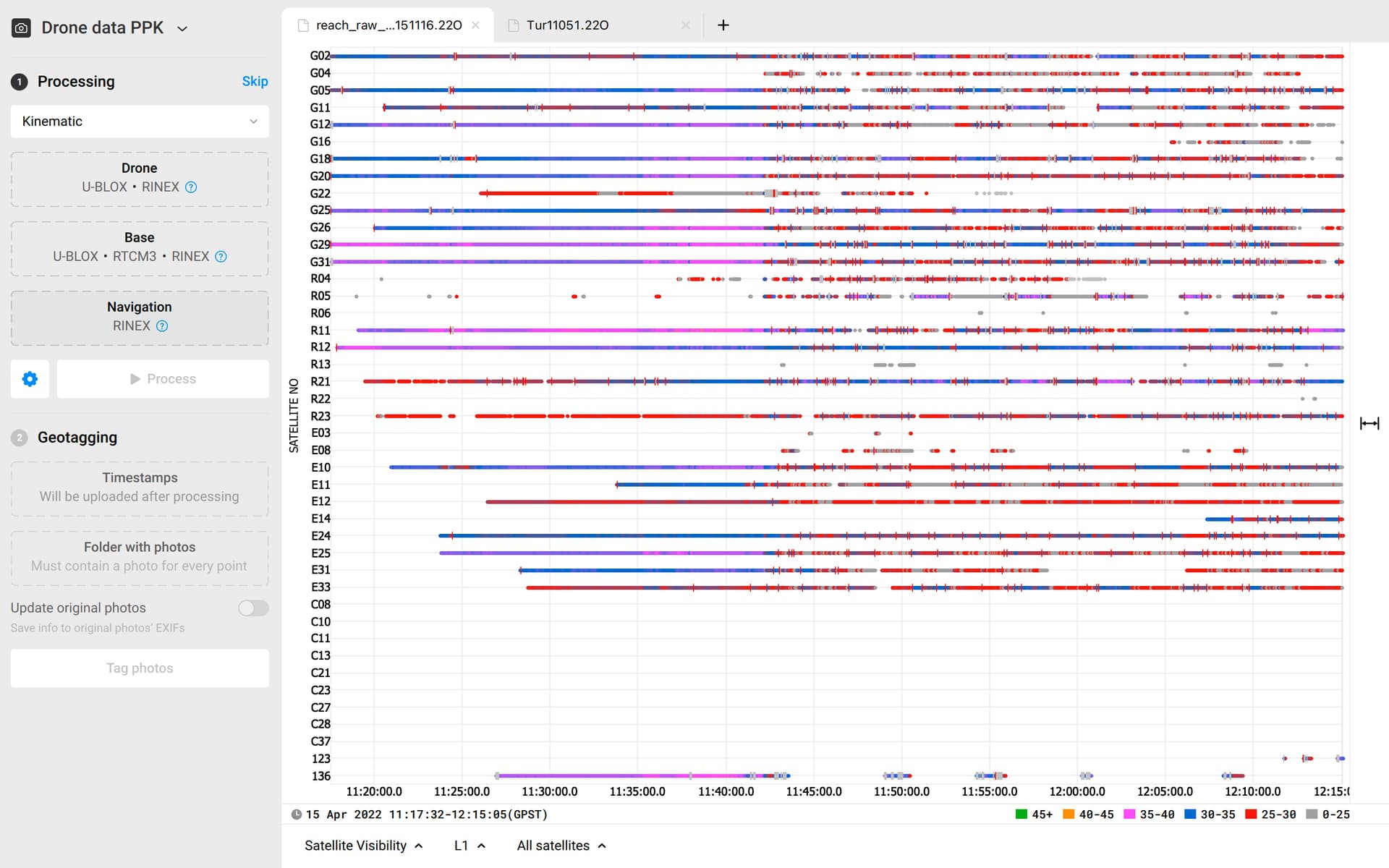
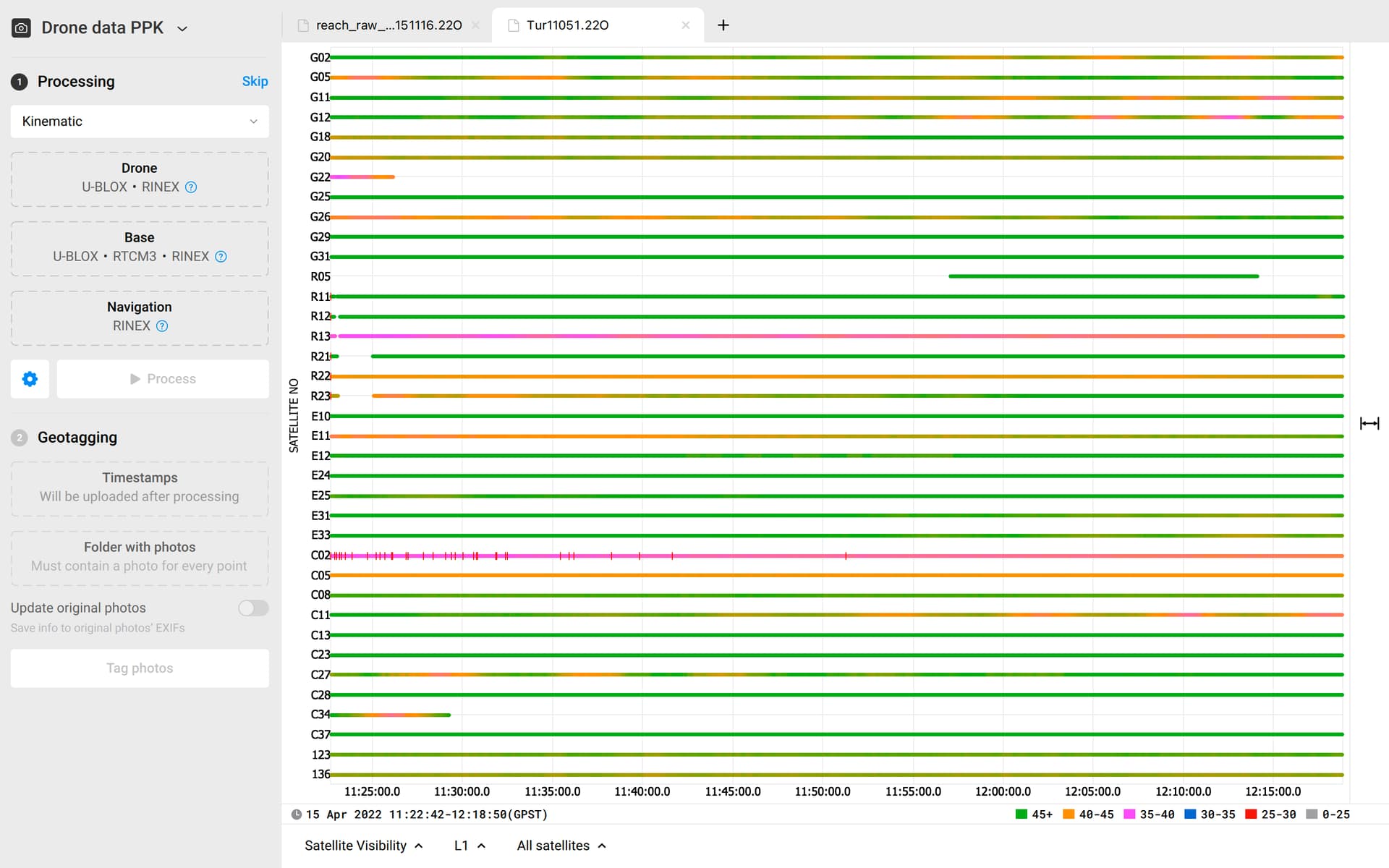
I’ve also checked the quality of the logs themself. Here is the data from your rover and base opened in Emlid Studio:
You can see that logs from the base are free from red marks – cycle slips. Nearly all visible satellites have a 45+ SNR, which is stable during the whole observation.
At the same time, the rover’s log contains lots of cycle slips which means that signals were interrupted. Signals’ SNR is low and sometimes changes sharply. All it looks like your Reach M2 is affected by the interference from the drone or drone’s electronics.
Radiofrequency noise affects the satellite reception and, as a result, the solution quality. Maybe it also affects the time marks recording. So the first thing I’d suggest to you is reconsidering the setup and moving Reach M2 from the source of RF noise.
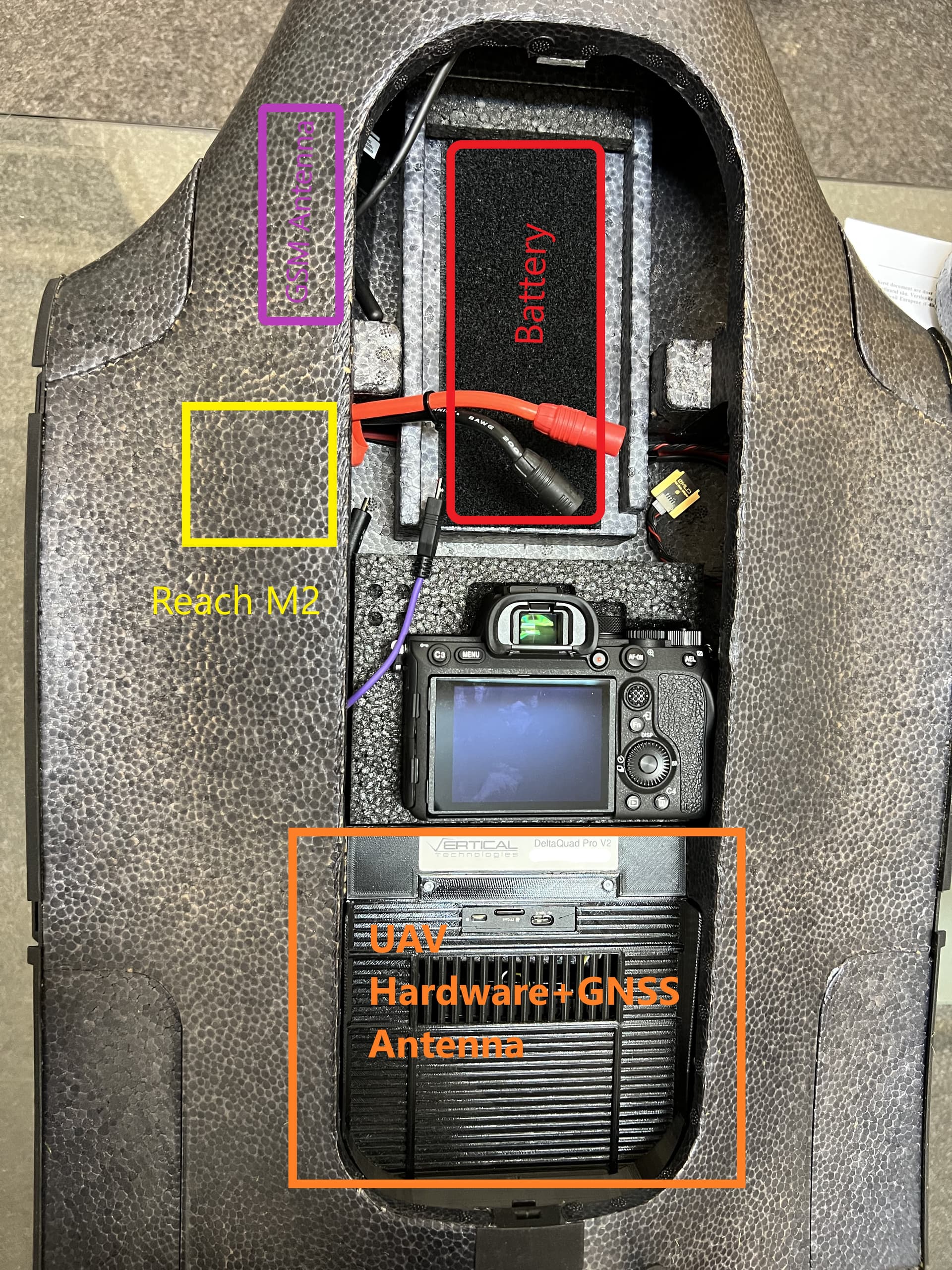
And what drone do you have? Please share the photos of the hardware setup. It’ll allow me to understand the issue better and share more thoughts on it.
How can I isolate the noise? Remove the GNSS antenna from the end into the nose? The GSM antenna is a simple usb stick with a sim card. Can that affect the reception aswell?
So that means the only thing attached to the M2 module should be the power and the hot shoe, and remove the antenna and the GSM dongle. I will test like that as soon as the weather allows me to, and I will come back with the results.
Trigger-cable, power, and GNSS antenna should connected to the M2.
But try to (re)move all other RF transmitters as far away from the GNSS antenna (and cable) as possible.
The foam shouldn’t affect GNSS signals, but you could also try having the antenna on the outside just to test.
I was worried at first but in the end the small board wrapped in red heat shrink doesn’t seem to be a motor ESC, which would be a huge source of interference. It looks like a PDB off of the batteries but that’s still a high voltage device. If you can move the M2 away from it, it might help.
Guys, thank you a lot for your suggestions! I also recommend placing the GNSS antenna outside the hull. It should significantly improve the quality of the logs.
And I support the idea of moving Reach M2 and GNSS antenna from all the sources of RF noise. By the way, one of our users with the DeltaQuad drone noted that in his case, unplugging the FPV camera was of great help. So I’d suggest you try it as well.
@alex.nechita, I’ll be waiting for the results of your tests.