I have a Reach M2 unit that has been setup via the App and is currently connected to my phone’s hotspot.
Entering the IP, Port, username, password I can retrieve a list of mount points and see the one I need.
However after selecting it and applying the NTRIP profile I get a never ending “Waiting for corrections” message.
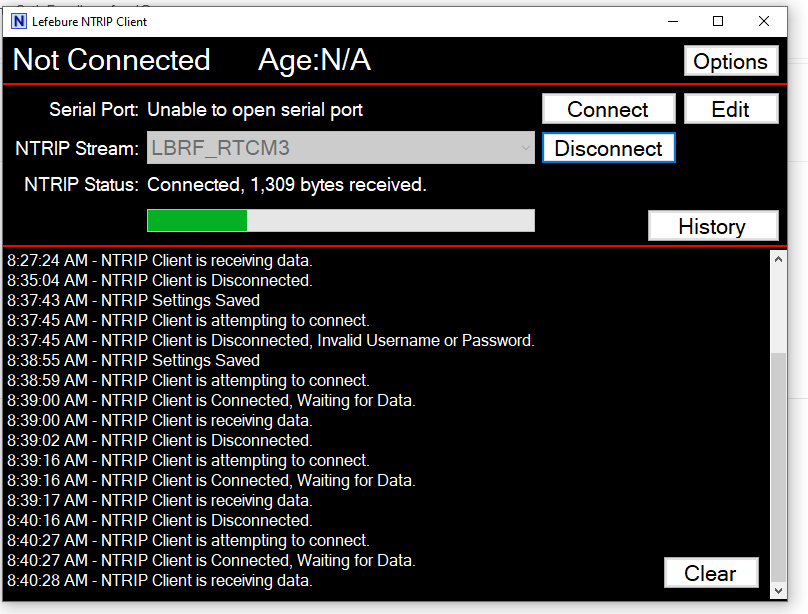
I downloaded an NTRIP client on my laptop http://lefebure.com/software/ntripclient/
and entered the same info as well as an estimate of my position, retrieved the correct mount point and established an NTRIP connection.
I am not sure why it is not working on the device itself though.
Any advice would be appreciated.
EDIT:
I took the device outside to test and initially get a message “Couldn’t connect to NTRIP. Check if the username, password or mount point is correct”, but after another 15-30 seconds it changes to “Receiving Corrections”.
I was under the impression we could setup the NTRIP info before heading out into the field, but I guess we require GNSS data before being able to connect to NTRIP ? Not sure why this is the case.
You may configure NTRIP settings before heading out into the field. Just in some cases, it can be hard to determine whether the connection with the NTRIP service is fine or not. Like in your case, when the receiver was indoors and had no solution, it didn’t receive any corrections from the NTRIP. But once the unit gets a GNSS signal, it should receive those corrections fine. This is how the receiver’s system work.
If it’ll get any signal at first, it’ll show the Receiving corrections status provided stable work of the NTRIP service. Usually, you can place the device near the window or on the balcony to get some signal. Though it won’t be of good quality, you can still use this to check the connection.
I was also curious, I see that on the webpage specifications for the M2 that it has a 9DOF IMU built in. Is that already being used within the device to aid in corrections? Is there anyway I can gain access to IMU readings?
You’re correct, Reach M2 has a built-in IMU. However, its readings aren’t used in the solution calculation. There’s no easy way to get this data. Can you please specify where do you want to use the IMU data?
Why is there an IMU if it is not being used for anything? We saw it mentioned as one of the features and were expecting to be able to get readings from it.
We are planning on getting readings from it into ROS, would there be a recommended way to do so?
If you want to have it on a drone, I recommend using the external IMU for such purposes. It should be more customizable for the tasks like having its readings fed into ROS.