I’m using a Reach M2 on v31.8, below is a report from my device. My goal is to have a USB LTE modem replace the role of a WiFi connection. The LTE modem I have and would like to get working is a Soracom Onyx. I chose this one because it is Linux compatible (per the “Hardware Integration” page of the docs), and it is, I tested it out on Ubuntu. Plugged it in, set APN, had to turn on roaming, then I had connection. Easy.
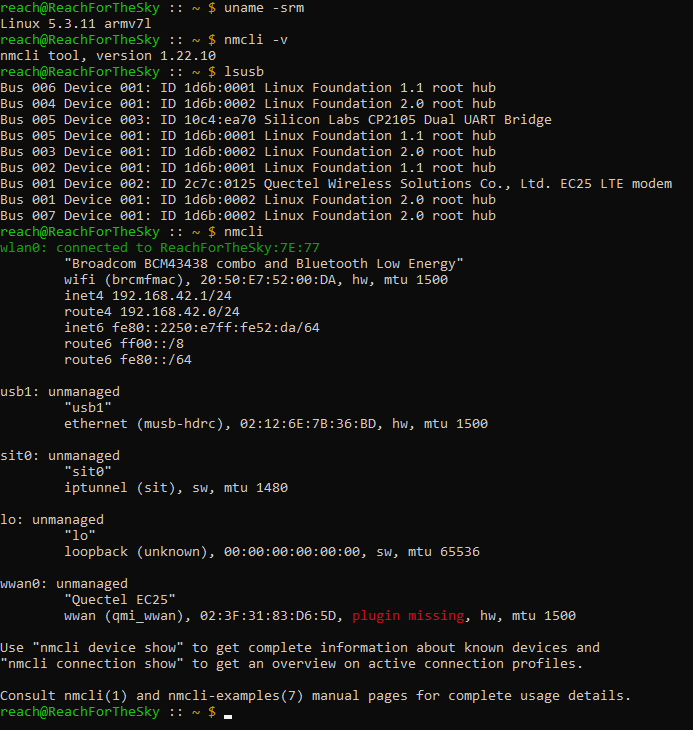
Not so on the M2, apparently. Haven’t found a way to get the M2 to talk with the modem. I even went as far as poking around in the M2’s OS via SSH, but the emlid user has absolutely no privilege.
I believe the issue is there is no setting in the Reach panel for APN settings. My understanding is that the other Emlid receivers with integrated SIM and 3G have these networking settings in Reach panel. Why not the M2?
Appreciate any guidance in these trying times.
Blockquote
Simple system report
app version: 31.8-r0
current_network:
ip: 192.168.42.1
security: wpa
ssid: ReachForTheSky:7E:77
enabled: true
mode: hotspot
base_mode:
base_coordinates:
accumulation: 30
antenna_offset: 3.175
coordinates:
height: 114.656
latitude: 38.20106811
longitude: -85.74630429
mode: fix-and-hold
output:
io_type: ntripsvr
settings:
lora:
air_rate: 9.11
frequency: 902000
output_power: 20
ntripcaster:
mount_point: '***'
password: '***'
port: 2101
username: '***'
ntripsvr:
address: '***'
mount_point: '***'
password: '***'
port: 2101
serial:
baud_rate: 38400
device: ttyEXTS0
tcpcli:
address: localhost
port: 9001
tcpsvr:
port: 9000
rtcm3_messages:
message_1004:
enabled: false
frequency: 1
message_1006:
enabled: true
frequency: 1
message_1008:
enabled: false
frequency: 0.1
message_1012:
enabled: false
frequency: 1
message_1033:
enabled: false
frequency: 0.1
message_1074:
enabled: true
frequency: 1
message_1084:
enabled: true
frequency: 1
message_1094:
enabled: true
frequency: 1
message_1124:
enabled: true
frequency: 1
message_1230:
enabled: true
frequency: 1
bluetooth:
enabled: true
pairing:
discoverable: true
no_input_no_output: true
pin: '***'
camera_trigger:
duty_cycle: 20
enabled: false
period: 2
reverse_polarity: false
correction_input:
base_corrections:
io_type: ntripcli
settings:
bluetooth:
send_position_to_base: false
lora:
air_rate: 9.11
frequency: 902000
output_power: 20
send_position_to_base: false
ntripcli:
address: '***'
mount_point: '***'
password: '***'
port: 2101
send_position_to_base: false
username: '***'
serial:
baud_rate: 38400
device: ttyEXTS0
send_position_to_base: false
tcpcli:
address: localhost
port: 10001
send_position_to_base: true
tcpsvr:
port: 10000
send_position_to_base: true
device:
privacy_policy_accepted: true
role: null
rv3_banner_shown: false
usage_analysis_accepted: false
logging:
logs:
autostart: true
base:
enabled: false
format: RTCM3
raw:
enabled: true
format: RINEX
rinex_options:
logging_interval: 0
marker_name: null
pole_height: 0.208
preset: custom
satellite_systems:
beidou: true
galileo: true
glonass: true
gps: true
qzss: true
sbas: true
time_adjustments_enabled: true
version: '3.03'
solution:
enabled: false
format: LLH
started: true
settings:
interval: 24
overwrite: true
simultaneous_logging: false
position_output:
output1:
io_type: bluetooth
nmea_settings:
bluetooth:
ebp:
enabled: true
update_rate: 5
gga:
enabled: true
update_rate: 5
gsa:
enabled: true
update_rate: 5
gst:
enabled: true
update_rate: 5
gsv:
enabled: true
update_rate: 5
main_talker_id: gn
rmc:
enabled: true
update_rate: 5
vtg:
enabled: true
update_rate: 5
zda:
enabled: true
update_rate: 5
serial:
ebp:
enabled: true
update_rate: 1
gga:
enabled: true
update_rate: 1
gsa:
enabled: true
update_rate: 1
gst:
enabled: true
update_rate: 1
gsv:
enabled: true
update_rate: 1
main_talker_id: gn
rmc:
enabled: true
update_rate: 1
vtg:
enabled: true
update_rate: 1
zda:
enabled: true
update_rate: 1
tcpcli:
ebp:
enabled: true
update_rate: 1
gga:
enabled: true
update_rate: 1
gsa:
enabled: true
update_rate: 1
gst:
enabled: true
update_rate: 1
gsv:
enabled: true
update_rate: 1
main_talker_id: gn
rmc:
enabled: true
update_rate: 1
vtg:
enabled: true
update_rate: 1
zda:
enabled: true
update_rate: 1
tcpsvr:
ebp:
enabled: true
update_rate: 1
gga:
enabled: true
update_rate: 1
gsa:
enabled: true
update_rate: 1
gst:
enabled: true
update_rate: 1
gsv:
enabled: true
update_rate: 1
main_talker_id: gn
rmc:
enabled: true
update_rate: 1
vtg:
enabled: true
update_rate: 1
zda:
enabled: true
update_rate: 1
settings:
bluetooth:
format: NMEA
serial:
baud_rate: 38400
device: ttyEXTS0
format: ERB
tcpcli:
address: localhost
format: ERB
port: 9000
tcpsvr:
format: LLH
port: 9001
output2:
io_type: 'off'
nmea_settings:
bluetooth:
ebp:
enabled: true
update_rate: 1
gga:
enabled: true
update_rate: 1
gsa:
enabled: true
update_rate: 1
gst:
enabled: true
update_rate: 1
gsv:
enabled: true
update_rate: 1
main_talker_id: gn
rmc:
enabled: true
update_rate: 1
vtg:
enabled: true
update_rate: 1
zda:
enabled: true
update_rate: 1
serial:
ebp:
enabled: true
update_rate: 1
gga:
enabled: true
update_rate: 1
gsa:
enabled: true
update_rate: 1
gst:
enabled: true
update_rate: 1
gsv:
enabled: true
update_rate: 1
main_talker_id: gn
rmc:
enabled: true
update_rate: 1
vtg:
enabled: true
update_rate: 1
zda:
enabled: true
update_rate: 1
tcpcli:
ebp:
enabled: true
update_rate: 1
gga:
enabled: true
update_rate: 1
gsa:
enabled: true
update_rate: 1
gst:
enabled: true
update_rate: 1
gsv:
enabled: true
update_rate: 1
main_talker_id: gn
rmc:
enabled: true
update_rate: 1
vtg:
enabled: true
update_rate: 1
zda:
enabled: true
update_rate: 1
tcpsvr:
ebp:
enabled: true
update_rate: 1
gga:
enabled: true
update_rate: 1
gsa:
enabled: true
update_rate: 1
gst:
enabled: true
update_rate: 1
gsv:
enabled: true
update_rate: 1
main_talker_id: gn
rmc:
enabled: true
update_rate: 1
vtg:
enabled: true
update_rate: 1
zda:
enabled: true
update_rate: 1
settings:
bluetooth:
format: NMEA
serial:
baud_rate: 38400
device: ttyEXTS0
format: ERB
tcpcli:
address: localhost
format: ERB
port: 9000
tcpsvr:
format: LLH
port: 9001
positioning_settings:
elevation_mask_angle: 15
glonass_ar_mode: false
gnss_settings:
positioning_systems:
beidou: true
galileo: true
glonass: true
gps: true
qzss: true
update_rate: 10
gps_ar_mode: fix-and-hold
max_horizontal_acceleration: 1
max_vertical_acceleration: 1
positioning_mode: kinematic
snr_mask: 35