We have recently integrated the Reach M2 receiver in a quadcopter which presents a problem when correlating events with images, always generating more events than images.
Flight 1 🡪 Discordance of 5 photos.
From EMLID Studio, in section 2 “Geotagging” 232 photos are requested and in the camera there are 227.
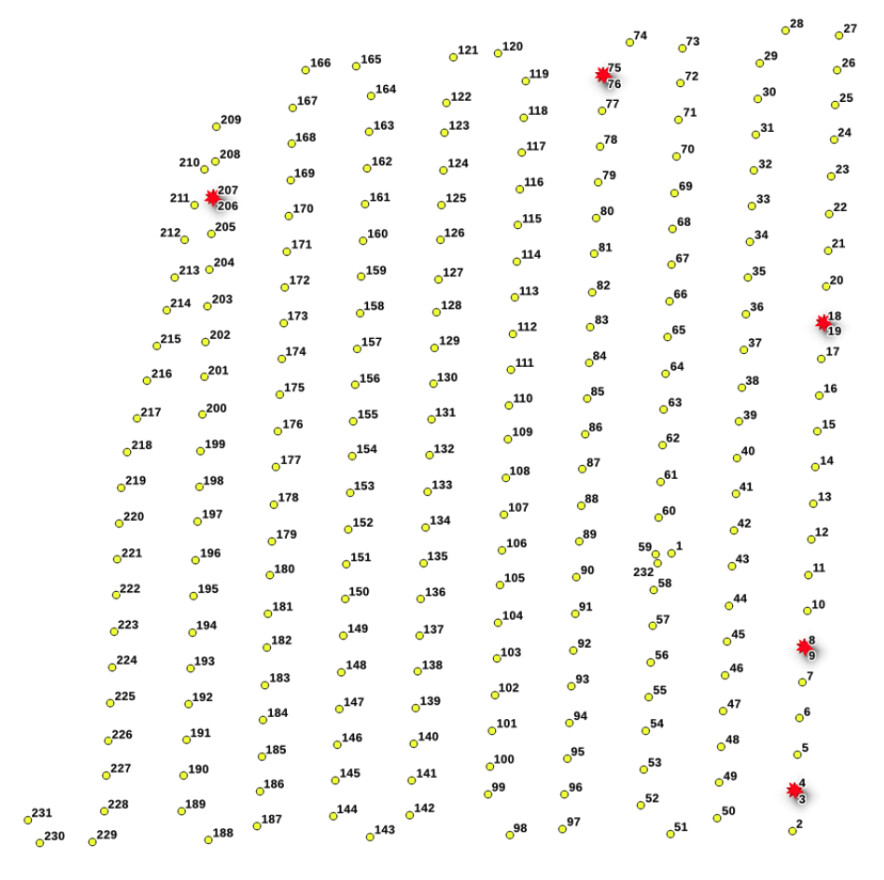
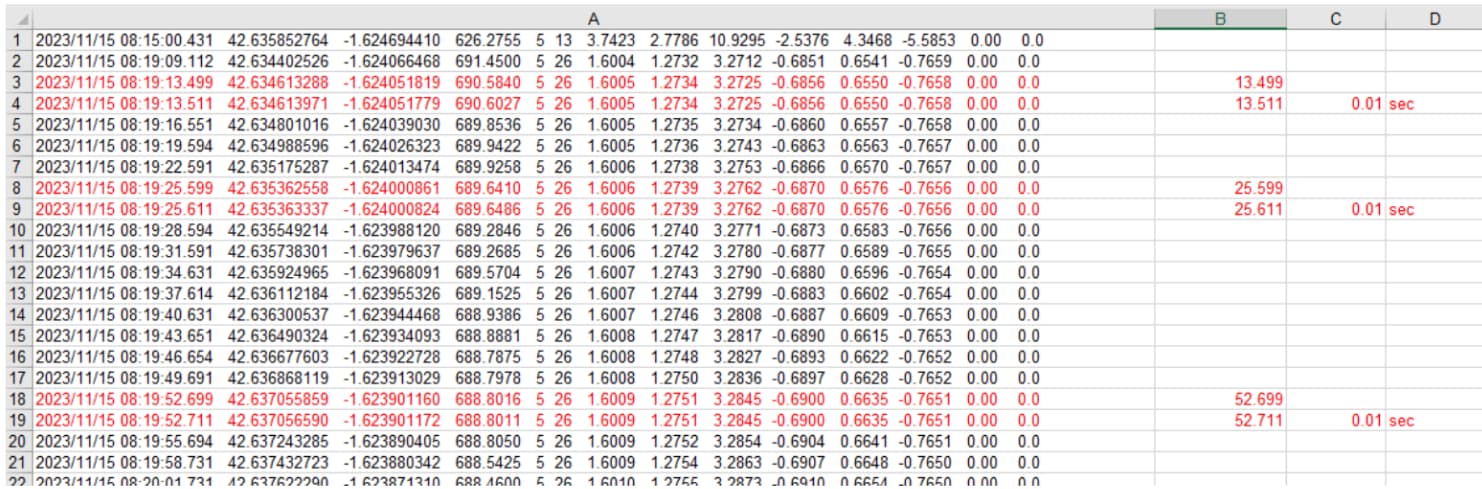
This event file stores the timestamps where the photo trigger has been activated. By putting the points generated in this event file, in the image below we see how there are two simultaneous events recorded on 5 different occasions (the events are duplicated, but only one photo is taken), hence the discordance of 5 photos.
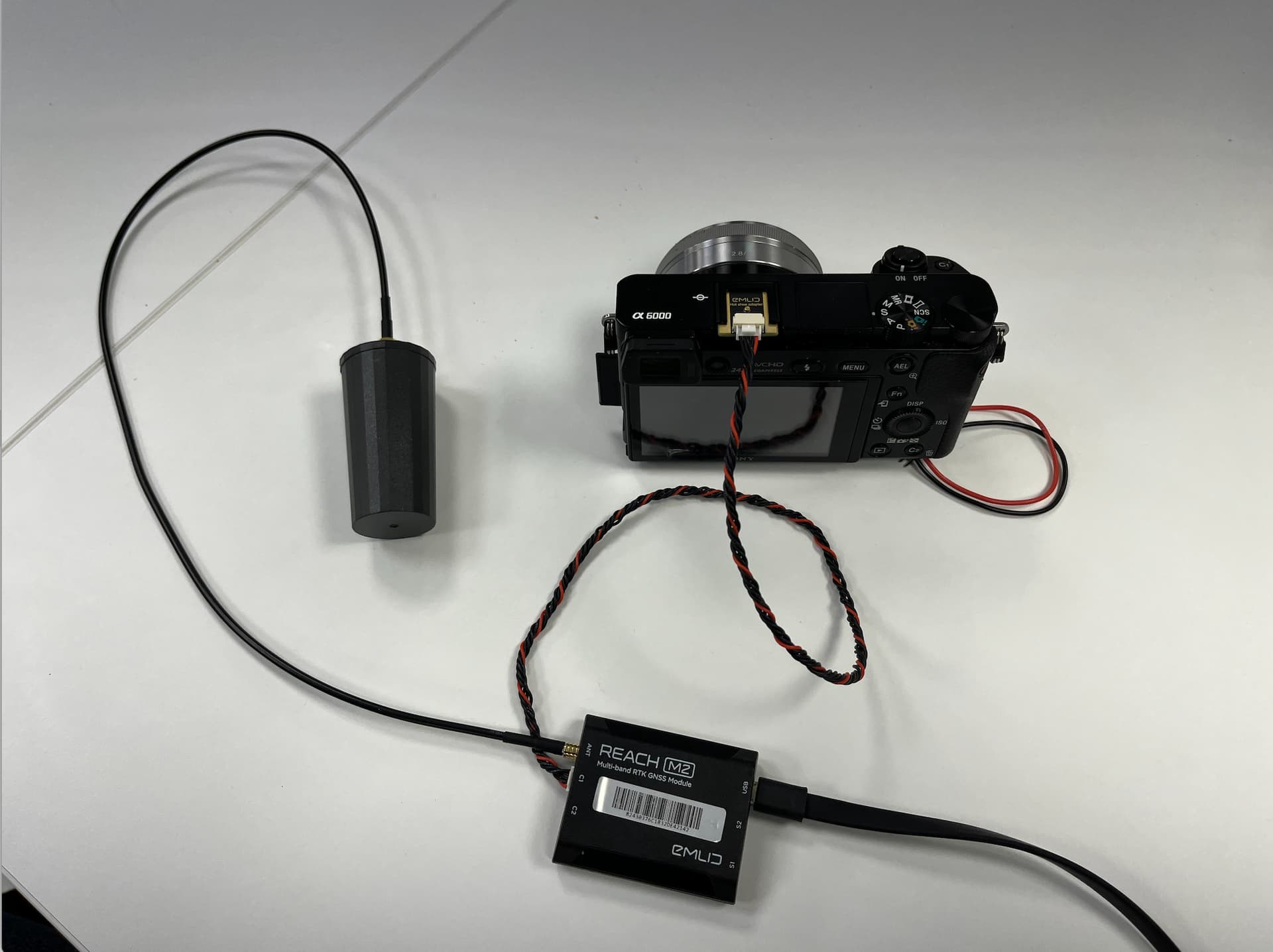
Here it is, I have disassembled it from the quadcopter, I use the original hot shoe without any change or modification, the camera is a sony alpha 6000.
Thank you! The connection to the camera hot shoe looks fine. But the cable from the camera hot shoe to the receiver seems tightly twisted. Let’s try to untwist it and record a test log with the devices outside your drone. You’ll need just to place Reach M2 with a GNSS antenna and camera in an area with a clear sky view, start logging, and take some pictures.
Please send me the recorded log. I’ll check if there are duplicated time marks in it.