I am working with the Reach M+ RTK along with the PixHawk2 and a ROCK64 single board computer. I am having trouble sending RTCM correction data into the S2 port of the Reach M+ over UART.
I want to send RTCM correction data from the ROCK64 to the Reach over UART. I also want to send GPS position data from the Reach to the PixHawk over UART. My initial thoughts were to have the correction data come in on the S2 port of the Reach and have the position data come out of the S1 port of the Reach. So far, I have not been able to get the correction data to come into the Reach on the S2 port. Right now, I have the solution working by connecting the Reach S1 Rx to the ROCK64 and S1 Tx to the PixHawk, but this does not seem correct. Can the S2 port be configured as UART input for correction data?
You should connect ROCK65 RX pint to the Reach M+ S1 or S2 TX pin and ROCK65 TX pint to the Reach M+ S1 or S2 RX. Please note, Reach M+ supports corrections in RTCM3 format, you’ll need to manually configure output on your ROCK65 board.
Regarding the integration with PixHawk, you should connect the serial cable into Reach’s JST-GH port and Pixhawk’s Serial 4/5 connector. Please, check our guide about Reach M+ and PixHawk integration following this link.
It is possible to use a single PixHawk board for the communication with Reach M+, you can either obtain corrections and output position using this flight controller.
Thank you for the reply.
This is a custom setup where the ROCK64 is supplying the correction data to the Reach from a proprietary source. The Reach sends position data to the PixHawk, then the PixHawk sends this position data to the ROCK64, then the ROCK64 communicates with a proprietary server which supplies the correction data back to the ROCK64, then the ROCK64 sends the correction data back to the Reach.
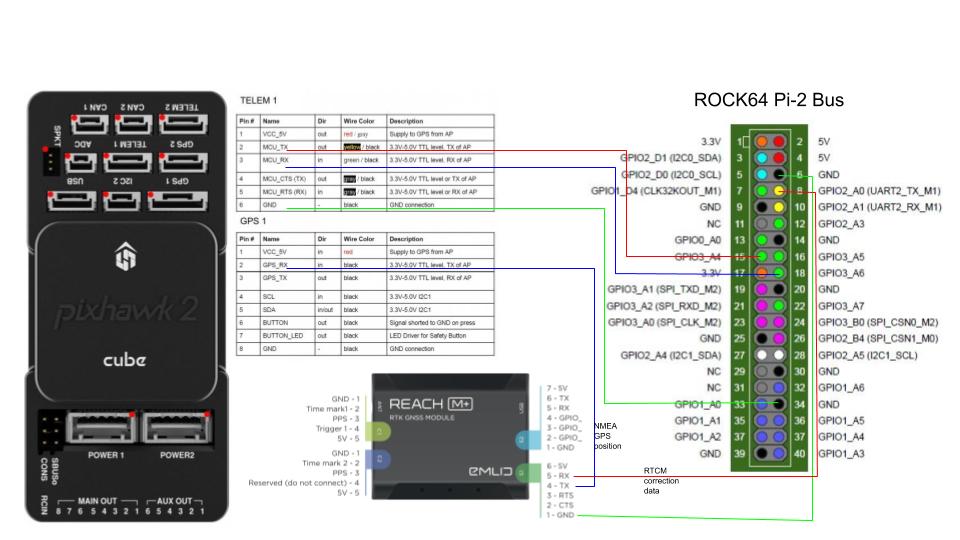
The ROCK64 is correctly sending this correction data to the S1 Rx pin as shown in the image I provided. This configuration works but I would rather have the correction data come into the Reach S2 Rx pin. When I connect the ROCK64 Tx to the S2 Rx pin the Reach does not acknowledge the data. The data is only acknowledged when sent to the S1 Rx pin.
Are you saying that the Reach will accept correction data on either the S1 or S2 Rx pin?
After further diagnosis I have found that there is no data being sent or received on the S2 interface. Is there anything I can do to confirm that the interface is operational, or any warranty that I can pursue to acquire a device with an operational S2 interface?
S2 port can be used for serial communications, however, this port is reserved for the LoRa module connection. There’s no support for this port in ReachView.
Since you could configure correction input using the S1 port, you can use this port. Is there any specific factor why you need an S2 port?
OK, so I think I understand your statement to say that the S2 port does not accept UART serial communications. This is not clear in the product documentation.
I can use the S1 port to send position data to one device and receive correction data from a separate device, although this is not the cleanest solution. Ideally, each device would be connected to a separate interface on the Reach.