I use a Globalstar Spot trace on my UAV because I do long time flight over the forest and i want to be able to rescue the ariplane in case of problem.
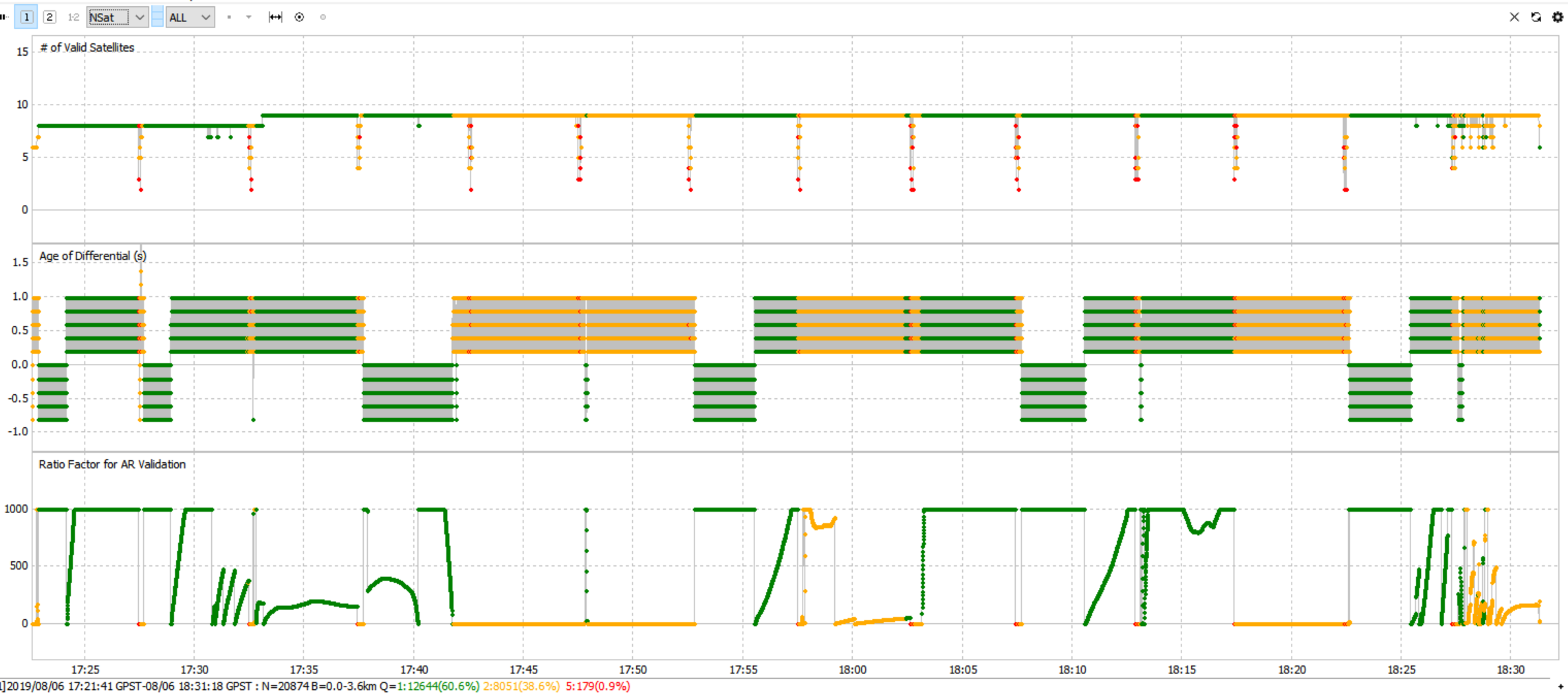
The device sends GPS information each 60 minutes, when this happens the reach M+ loose signal and get back after some time.
Loosing geotag on some pictures is not a problem but it happens that when some pictures have no GPS fix, the GPSpost loose its time marks and does not count that like zero or weak, the result is a different number of time marks and I am not able to know what pictures corresponds to the positions I get from the post processing.
Is there a workaround to keep no fix positions in the *_events.pos file?
Thank you
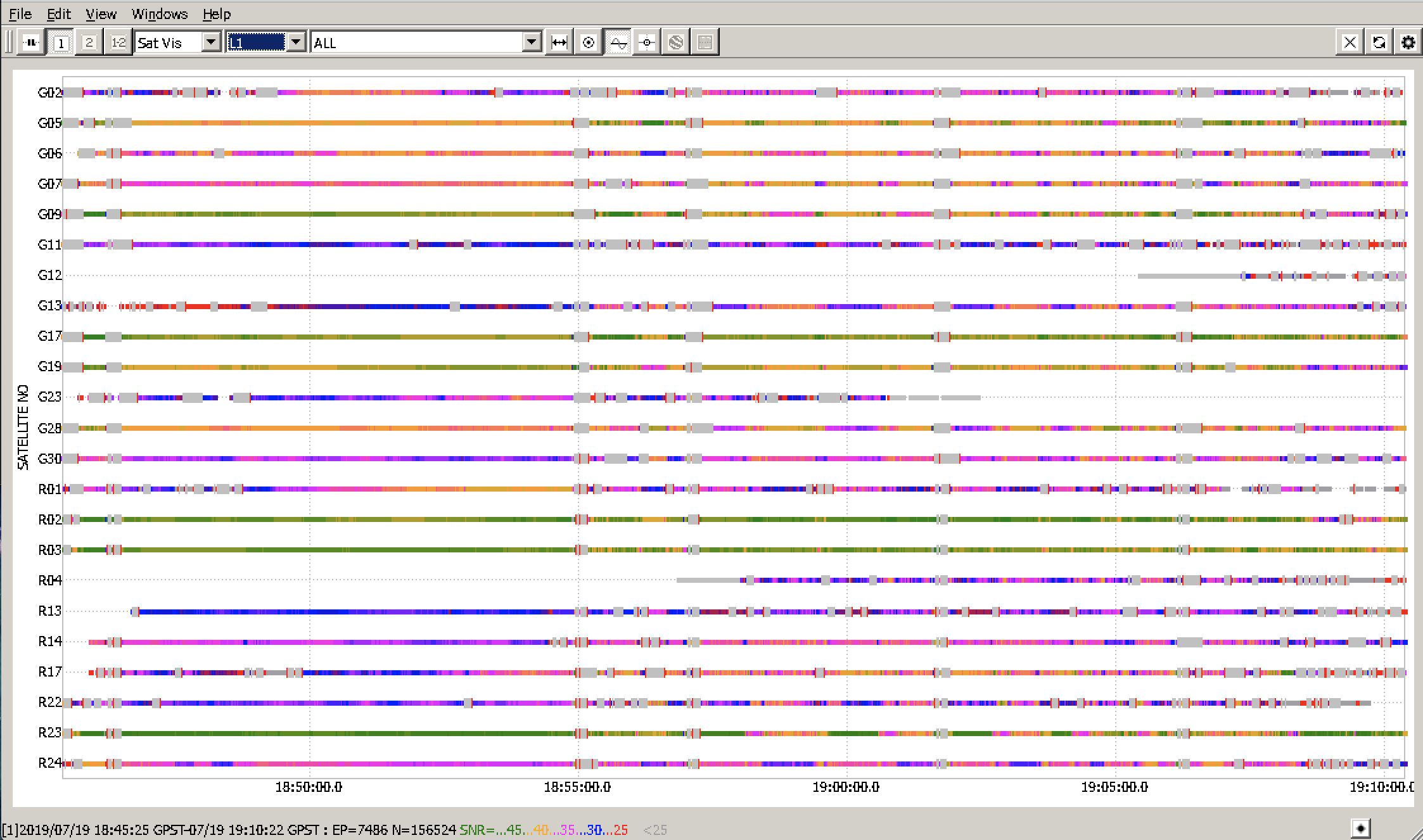
trianom raw_201907191845_RINEX-3_03.zip (2.8 MB) 03-no-alt.zip (621.5 KB)
Base corrected position (SIRGAS):
Lat -2° 56´ 15,7298 Long -47° 26´ 36,5232 Alt Geo 104,67 Alt Orto 130,46 UTM N9674995.751 UTM E228374.461 MC -45
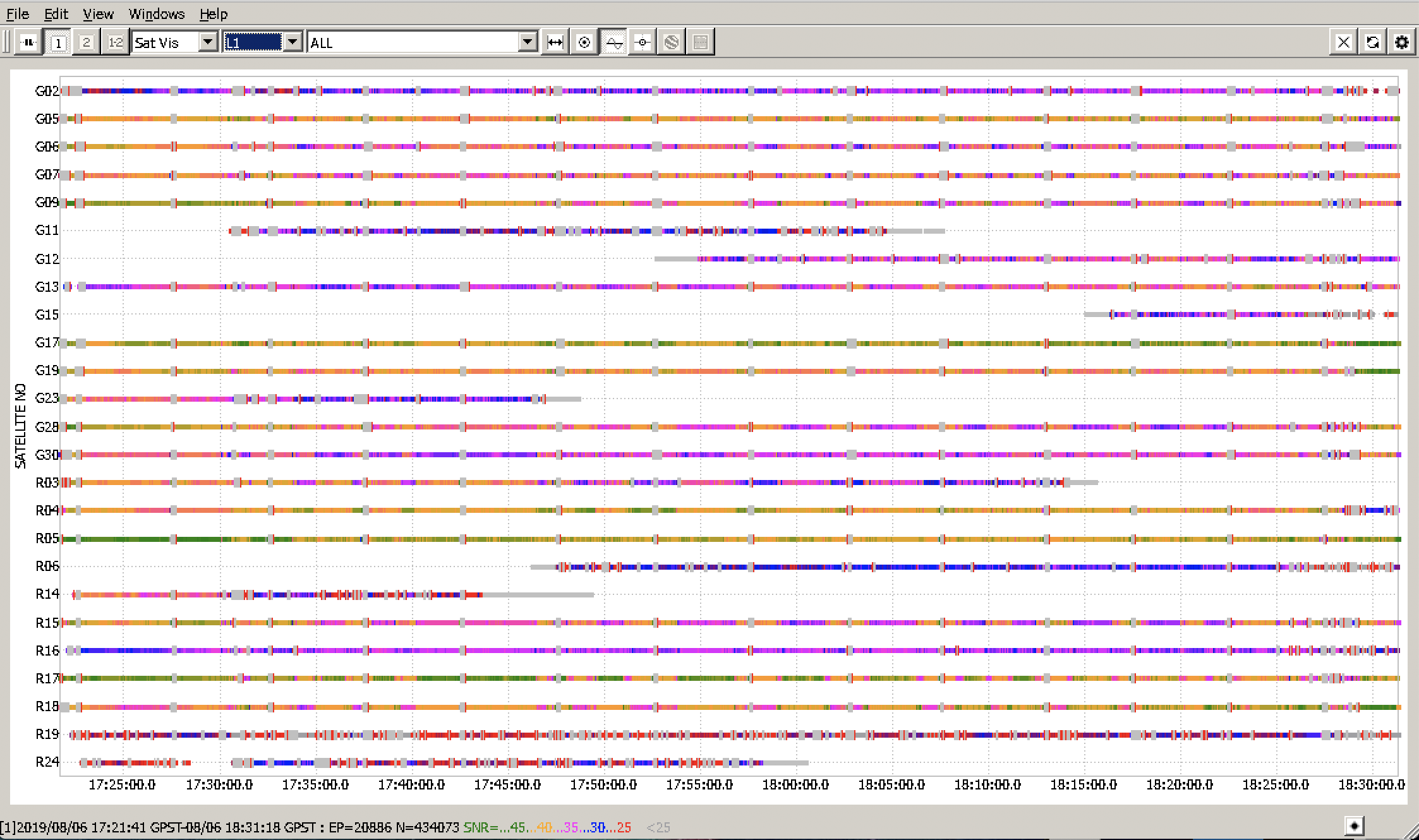
This is from the first picture raw_201908061721_RINEX-3_03.zip (7.6 MB) 03-BASE.zip (2.9 MB)
Base corrected position (SIRGAS):
Lat -3° 59´ 37,6117 Long -47° 24´ 50,8594alt Geo 226,67 Alt Orto 251,57 UTM N 9558166.522 UTM E 231936.942 MC -45
I was using another reach module, the old one but same configuration, I have flown no more with that GPS tracker but I want to use it again
I am going to use Reach RTK (old model) again, the M+ burned, don’t know why but it was going very hot.
So using now v. 2.20.8 on Reach RTK
Can you please look at the files I have share? Thank you
May I ask you to share the photos of your hardware setup and the rover placement? It’d help us understand both the issue with the data quality and the overheating.
Was the receiver properly ventilated in your setup? Would it be possible to generate the Full System Report on the unit and send it to me in PM?